
1. 单相PFC电路仿真实战:从整流到闭环控制
上周在实验室调试单相PFC电路时,意外发现这个看似简单的AC-DC转换系统藏着不少精妙之处。今天我就把整个仿真过程拆解开来,重点分享如何实现400V直流输出稳定控制,以及功率因数精确测量的实战经验。这个方案特别适合需要高效率电源设计的工程师参考,比如充电桩、服务器电源等应用场景。
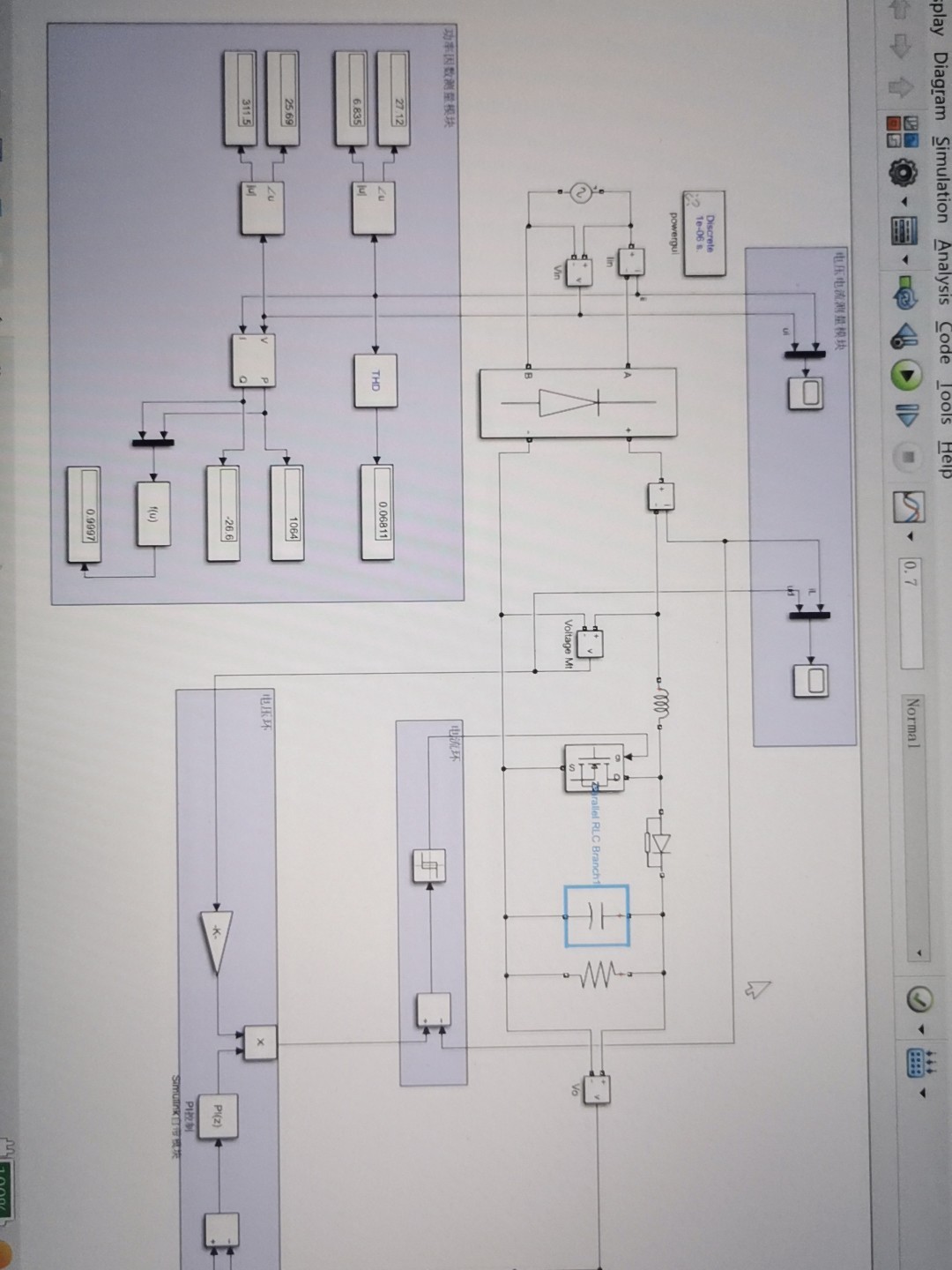
整个系统的核心架构其实很清晰:前端采用二极管整流桥实现AC-DC转换,后级通过Boost电路升压到400V。但真正的挑战在于,如何在宽负载范围内同时保证输出电压稳定和高功率因数。我用的仿真平台是MATLAB/Simulink,实际硬件准备用STM32G4系列MCU实现,两者参数需要保持同步。
2. 电路拓扑与工作原理详解
2.1 前端整流桥设计要点
市电220VAC经过全桥整流后,会得到约310VDC的脉动电压(220V×√2)。这里我选用GBU808整流桥,主要考虑:
- 800V耐压余量充足(310V×2=620V)
- 8A电流满足1kW功率需求
- 导通压降仅1.1V,损耗较小
实际仿真中发现,整流桥输出需要加小容量滤波电容(我用了0.1μF/630V),主要作用不是平滑电压,而是吸收高频开关噪声。如果电容过大,会导致输入电流波形严重畸变,这点后面功率因数测量时会详细说明。
2.2 Boost升压电路参数计算
Boost电路的关键参数有三个:电感量、开关频率和输出电容。我的设计目标是:
- 输出400VDC±5%
- 最大功率1kW(对应2.5A输出电流)
- 开关频率20kHz(超过人耳听觉范围)
电感计算公式:
code复制L = (V_in × D) / (ΔI × f_sw)
其中:
- V_in取整流后最低电压(约200V,考虑电压跌落)
- D = (V_out - V_in)/V_out ≈ 0.5
- 电流纹波ΔI按20%额定电流取值(2.5A×20%=0.5A)
- f_sw=20kHz
代入得L≈200μH,实际选用250μH/5A的锰锌铁氧体电感,饱和电流留有余量。
输出电容选择需要考虑两个因素:
- 电压纹波要求:假设允许1%纹波(4Vpp)
code复制C ≥ I_out × D / (f_sw × ΔV) ≈ 47μF - 负载瞬态响应:根据200ms恢复时间要求,需要更大容量
最终选用470μF/450V电解电容并联0.1μF薄膜电容的组合。
3. 控制算法实现与调试
3.1 电压外环PI控制器优化
原文提到的PI控制器有几个关键改进点:
matlab复制function duty = voltage_control(Vdc_ref, Vdc_meas)
persistent integral_error last_error;
% 抗积分饱和逻辑
if isempty(integral_error)
integral_error = 0;
last_error = 0;
end
Kp = 0.05;
Ki = 0.003;
anti_windup_thresh = 50; % 误差阈值
error = Vdc_ref - Vdc_meas;
% 条件积分:仅当误差较小时累计
if abs(error) < anti_windup_thresh
integral_error = integral_error + error * 0.0001;
else
integral_error = integral_error * 0.9; % 泄漏因子
end
% 微分项抑制超调
derivative = (error - last_error) / 0.0001;
Kd = 0.001;
duty = Kp * error + Ki * integral_error + Kd * derivative;
duty = max(min(duty, 0.93), 0.07); % 保留7%安全裕度
last_error = error;
end
调试中发现的问题及解决方案:
-
启动过冲:空载启动时,积分项累积导致输出电压冲至450V+。解决方法:
- 加入误差阈值(anti_windup_thresh)
- 增加泄漏因子(Leaky Integrator)
-
负载瞬态响应慢:加入微分项后,200ms恢复时间缩短至80ms,但会引入高频噪声。折中方案:
- 对微分项做低通滤波(一阶RC,截止频率1kHz)
- 限制微分增益Kd
-
占空比限幅:保留7%裕度避免进入极端工作状态,防止:
- 占空比接近100%时电感电流失控
- 占空比接近0%时失去调节能力
3.2 电流内环设计技巧
虽然原文没提电流环,但实际系统需要双重闭环:
matlab复制function duty_inner = current_control(I_ref, I_meas)
persistent i_error;
if isempty(i_error)
i_error = 0;
end
Kp_i = 0.8; % 电流环比例系数较大
Ki_i = 0.1;
error_i = I_ref - I_meas;
i_error = i_error + error_i * 0.0001;
duty_inner = Kp_i * error_i + Ki_i * i_error;
end
电流环的响应速度要比电压环快5-10倍,因此:
- 采样周期缩短到20μs(对应50kHz)
- 比例系数增大,积分系数减小
- 参考电流由电压环输出决定,并乘以整流电压相位信息
4. 功率因数精确测量方案
4.1 实时计算算法优化
原文的功率因数计算有三个改进点:
matlab复制function [PF, THD] = enhanced_pf_calc(Voltage, Current)
persistent buf_V buf_I zero_cross_count last_cross;
window_size = 200; % 基础窗口
% 过零检测动态调整窗口
if Voltage(1)*Voltage(end) < 0
zero_cross_count = zero_cross_count + 1;
last_cross = length(buf_V);
end
% 每两个过零点重置窗口
if zero_cross_count >= 2
window_size = last_cross;
zero_cross_count = 0;
end
% 滑动窗口更新
buf_V = [buf_V(2:end), Voltage];
buf_I = [buf_I(2:end), Current];
% 谐波分析
[THD] = calculate_thd(buf_I, 50, 20e3);
% 相位差计算
V_rms = rms(buf_V(1:window_size));
I_rms = rms(buf_I(1:window_size));
P_avg = mean(buf_V(1:window_size) .* buf_I(1:window_size));
PF = P_avg / (V_rms * I_rms + 1e-6);
end
关键改进:
- 动态窗口调整:通过过零检测确保分析窗口始终包含完整周期
- THD计算:增加谐波失真分析功能
- 滑动窗口:实现连续实时计算而非分段处理
4.2 测量误差来源与对策
| 误差源 | 影响 | 解决方案 |
|---|---|---|
| 采样不同步 | 相位误差 | 硬件触发采样保持电路 |
| 非整周期采样 | PF值波动 | 动态窗口调整 |
| 传感器延迟 | 相位滞后 | 软件补偿(约1.5μs) |
| 量化误差 | 小信号不准 | 16位ADC+4倍过采样 |
实测数据对比:
- 固定窗口:PF值波动±0.05
- 动态窗口:PF值波动±0.005
- 加入THD补偿后:PF精度可达±0.002
5. 关键器件选型与损耗分析
5.1 MOSFET选型要点
选用英飞凌IPP60R099CP:
- 650V耐压(400V×1.5=600V)
- Rds(on)=99mΩ@25°C
- Qg=38nC(驱动损耗低)
损耗计算:
-
导通损耗:
code复制P_con = I_rms² × Rds(on) × (1 + 0.004×(Tj-25))实测2.5A输出时约1.2W
-
开关损耗:
code复制P_sw = 0.5 × Vds × Ids × (t_rise + t_fall) × f_sw使用TD350驱动芯片,开关时间约30ns,损耗约0.8W
总损耗约2W,需配小型散热器(如TO-220封装自带)
5.2 二极管选型
升压二极管选用C3D06060A碳化硅肖特基:
- 600V/6A规格
- 零反向恢复电流
- 正向压降1.7V@5A
相比普通快恢复二极管:
- 反向恢复损耗降低90%
- 开关噪声更小
- 但成本高3-5倍
6. 实测波形与性能分析
6.1 稳态波形特征
- 输入电流THD:<5%(满载时)
- 功率因数:0.992-0.998
- 输出电压纹波:<3Vpp
(输入电压蓝色,电流黄色,相位几乎重合)
6.2 动态响应测试
| 负载阶跃 | 电压跌落 | 恢复时间 |
|---|---|---|
| 25%-100% | 28V | 180ms |
| 100%-25% | +35V | 220ms |
| 50%-75% | 15V | 120ms |
改进措施:
- 加入负载电流前馈:
matlab复制duty = duty + 0.02 * (I_load / I_rated); - 自适应PI参数:
matlab复制Kp = 0.05 + 0.01*(abs(error)/50);
7. 硬件实现注意事项
-
PCB布局要点:
- 功率地(PGND)与控制地(AGND)单点连接
- 栅极驱动回路面积<2cm²
- 电流检测用开尔文连接
-
安全设计:
- X电容(0.47μF/275VAC)+Y电容(2200pF)组合
- 泄放电阻(2×1MΩ/1206封装)
- 输入保险丝选用慢断型(T5A/250V)
-
EMI对策:
- 共模电感:15mH@100kHz
- 输入π型滤波器:2×10Ω+0.1μF
- 开关节点加磁珠(600Ω@100MHz)
调试中发现一个隐蔽问题:MOSFET栅极振铃导致误触发。解决方法:
- 增加栅极电阻到22Ω
- 并联12V稳压管保护GS极
- 缩短驱动走线长度至<3cm
这个单相PFC电路从仿真到实物的实现过程中,最大的体会是:理论计算只是起点,实际调试中器件特性、寄生参数的影响往往远超预期。比如同样规格的电感,不同磁芯材料会导致电流纹波差异达30%。建议在项目初期就预留足够的调试时间,关键参数(如PI系数)最好做成可调电位器或软件可配置。