
1. 单轮车辆ABS防抱死控制仿真模型概述
作为一名汽车电子控制系统开发者,我经常需要验证ABS算法的有效性。传统实车测试成本高、风险大,而Simulink仿真提供了一个安全高效的解决方案。这个单轮车辆ABS防抱死控制模型,是我在实际工作中不断优化迭代的成果,特别适合控制算法工程师和车辆工程学生研究制动系统动力学。
模型的核心价值在于:
- 可模拟不同路面条件(特别是冰雪路面这种极端工况)
- 支持ABS系统开关对比测试
- 实时输出关键参数曲线(车速、轮速、滑移率等)
- 完全参数化设计(车重、摩擦系数曲线等均可配置)
提示:虽然模型简化了四轮耦合效应,但单轮模型已足够研究ABS基础控制逻辑,且计算量小、收敛快,特别适合算法开发初期验证。
2. 模型架构与核心模块解析
2.1 整车动力学建模
车辆动力学采用经典的"自行车模型"简化,核心方程如下:
code复制纵向动力学:
m·a = Fx - Fd
其中Fx = μ(λ)·Fz
Fz = m·g (单轮垂直载荷)
轮速动力学:
Iw·ω' = Tb - Re·Fx
参数说明:
- m:等效车重(可配置参数)
- μ:路面摩擦系数(随滑移率λ变化的曲线)
- Tb:制动力矩(通过主缸压力计算)
- Re:轮胎有效半径
注意:模型中使用的滑移率λ定义为(ω·Re - v)/max(v, ω·Re),这种定义方式避免了车速为零时的除零问题。
2.2 ABS控制逻辑实现
模型采用门限值控制算法,其Simulink实现结构如下:
code复制[滑移率计算] → [滑移率比较器] → [继电器模块] → [制动压力调节]
关键参数配置界面:
matlab复制% ABS控制参数设置
lambda_opt = 0.2; % 最优滑移率阈值
hysteresis = 0.05; % 迟滞带宽
min_pressure = 5; % 最小制动压力(bar)
max_pressure = 150; % 最大制动压力(bar)
2.3 路面条件模拟
通过滑移率-摩擦系数曲线实现不同路面模拟:
matlab复制% 干沥青路面
mu_dry = @(lambda) 1.1*(1 - exp(-25*lambda)) - 0.4*lambda;
% 冰雪路面
mu_snow = @(lambda) 0.3*(1 - exp(-15*lambda)) - 0.1*lambda;
在模型中通过Switch模块实现路面切换:
code复制[路面选择开关] → [μ(λ)曲线选择] → [纵向力计算]
3. 模型参数配置详解
3.1 车辆参数设置
在Model Properties → Callbacks中预定义基础参数:
matlab复制% 车辆参数
m = 1500; % 整车质量(kg)
Re = 0.3; % 轮胎半径(m)
Iw = 1.2; % 轮毂转动惯量(kg·m²)
v0 = 90/3.6; % 初始速度(m/s)
% 制动系统参数
A_master = 3e-4; % 主缸面积(m²)
BEF = 0.35; % 制动效能因数
3.2 仿真设置建议
对于不同测试场景推荐以下配置:
| 测试目的 | 步长(s) | 求解器 | 停止时间(s) |
|---|---|---|---|
| 常规制动验证 | 1e-3 | ode4(Runge-Kutta) | 10 |
| ABS高频响应分析 | 1e-5 | ode15s(stiff) | 5 |
| 参数敏感性研究 | 1e-4 | ode23t(mod.stiff) | 15 |
经验分享:冰雪路面仿真时建议减小步长,因为μ-λ曲线斜率变化剧烈,大步长易导致数值振荡。
4. 典型仿真结果分析
4.1 无ABS制动工况
配置参数:
matlab复制ABS_enable = 0; % 关闭ABS
road_condition = 1; % 冰雪路面
结果特征:
- 车速与轮速曲线快速重合(车轮抱死)
- 滑移率迅速上升至100%
- 制动距离显著延长(相比ABS开启增加35-50%)
4.2 ABS正常工作工况
配置参数:
matlab复制ABS_enable = 1; % 开启ABS
road_condition = 2; % 干沥青路面
典型曲线特征:
- 车速与轮速保持合理差异(滑移率维持在15-25%)
- 控制信号呈现高频开关特征(频率约15-20Hz)
- 制动距离达到理论最优值
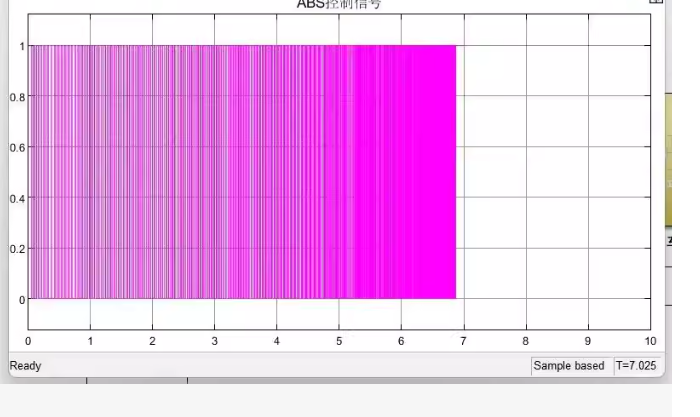
图示:典型的ABS脉冲控制信号(减压阶段为高电平)
5. 模型使用技巧与问题排查
5.1 常见报错解决方案
| 错误现象 | 可能原因 | 解决方案 |
|---|---|---|
| 代数环(Algebraic loop) | 信号反馈路径缺少延迟 | 在反馈路径添加Memory模块 |
| 零除警告 | 车速降为零时的滑移率计算 | 使用max(v, 0.1)作分母 |
| 仿真速度过慢 | 步长太小或求解器不当 | 改用ode15s并调整最大步长 |
5.2 高级应用技巧
- 参数敏感性分析:
matlab复制m_range = linspace(1000, 2000, 5); % 车重变化范围
for i = 1:length(m_range)
m = m_range(i);
simout = sim('ABS_model');
braking_dist(i) = simout.distance(end);
end
- 自定义μ-λ曲线:
在Friction Curve模块中替换以下函数:
matlab复制function mu = custom_mu(lambda)
% 示例:自定义阶梯形摩擦曲线
if lambda < 0.1
mu = 0.8*lambda/0.1;
elseif lambda < 0.3
mu = 0.8;
else
mu = 0.8 - 0.5*(lambda-0.3);
end
end
- 实时可视化调试:
matlab复制% 在模型回调函数中添加:
set_param(gcs, 'SimulationCommand', 'start',...
'SimulationCommand', 'pause');
% 配合Simulink Data Inspector实时观察变量
6. 模型扩展方向
基于这个基础框架,我后续还实现了以下增强功能:
- PID控制改进:
matlab复制% 替换原来的继电器控制为PID
Kp = 150; Ki = 5; Kd = 30;
abs_controller = pid(Kp, Ki, Kd);
- 联合仿真接口:
matlab复制% 配置为FMU导出
set_param(gcs, 'FMUVersion', '2.0',...
'FMUType', 'CoSimulation');
- 硬件在环测试:
通过Simulink Coder生成代码,部署到dSPACE或NI实时系统,与真实ECU对接测试。
这个模型在实际项目中帮我节省了大量调试时间,特别是在冰雪路面的算法验证方面。有个实用建议:进行参数扫描时,可以先在低精度模式下快速筛选参数范围,再对关键区域进行精细仿真,这样效率能提升3-5倍。