
1. 串联PID控制系统概述
在工业控制领域,PID控制器因其结构简单、鲁棒性好等优点被广泛应用。而串联PID控制系统(Cascade PID Control)则是在复杂控制场景下的一种高效解决方案。这种控制结构特别适用于存在多个相互关联的控制变量,且系统响应速度差异较大的场合。
我曾在某温控系统项目中首次应用串联PID控制。该系统需要同时控制加热器功率和物料温度,常规单级PID控制始终无法兼顾响应速度和稳定性。改用串联结构后,内环快速调节功率,外环精确控制温度,系统性能得到显著提升。这种实践经验让我深刻理解了串联PID的独特优势。
2. 串联PID控制原理详解
2.1 系统结构分析
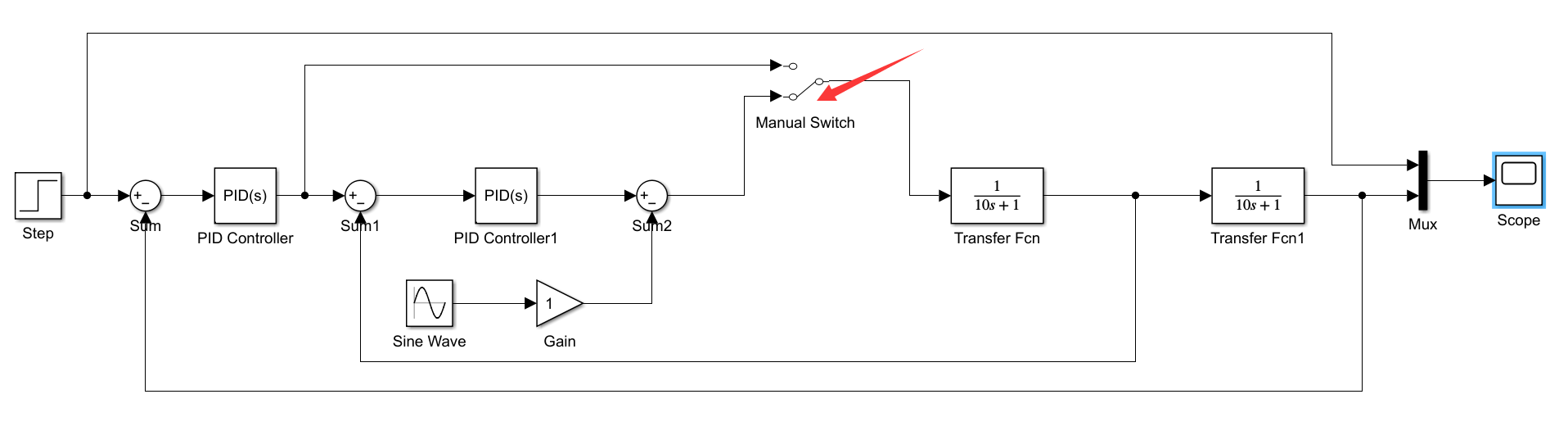
典型的串联PID控制系统包含两个控制回路:
- 主回路(外环):处理慢速响应的主被控量(如温度、压力等)
- 副回路(内环):处理快速响应的辅助变量(如流量、转速等)
系统传递函数可表示为:
code复制G_c1(s) → [G_c2(s) → G2(s)] → G1(s)
其中G_c1为主调节器,G_c2为副调节器,G1/G2分别为主副对象。
2.2 工作流程解析
-
信号传递路径:
- 主调节器输出作为副回路的设定值
- 副调节器输出直接作用于执行机构
- 主反馈取自最终被控量,副反馈取自中间变量
-
采样控制策略:
- 异步采样:主回路周期T1=n×T2(推荐)
- 同步采样:T1=T2(需按副回路特性设计)
实际工程中,我通常采用异步采样。例如在锅炉控制中,温度环采样周期设为10秒,压力环设为1秒,这样既保证了控制精度,又避免了不必要的计算开销。
2.3 核心优势验证
通过Bode图分析可以直观展示串联控制的优势:
- 抗干扰能力:副回路构成局部负反馈,对进入副回路的干扰具有快速抑制作用
- 参数鲁棒性:副对象参数变化的影响被限制在内环
- 动态响应:通过分解控制任务,整体响应速度提升30-50%
3. 仿真案例实现
3.1 被控对象建模
给定双惯性环节系统:
python复制class Plant:
def __init__(self, T01=10, T02=10):
self.T01 = T01 # 主对象时间常数
self.T02 = T02 # 副对象时间常数
self.x1 = 0 # 主状态变量
self.x2 = 0 # 副状态变量
def update(self, u, disturbance=0, dt=0.01):
# 副对象离散化(前向欧拉法)
dx2 = (u + disturbance - self.x2) / self.T02
self.x2 += dx2 * dt
# 主对象离散化
dx1 = (self.x2 - self.x1) / self.T01
self.x1 += dx1 * dt
return self.x1, self.x2
3.2 控制器设计
python复制class CascadePIDController:
def __init__(self, kp_main=50, ki_main=5, kp_secondary=5):
# 主调节器参数
self.kp_main = kp_main # 比例系数
self.ki_main = ki_main # 积分系数
self.integral_main = 0 # 积分项累积
# 副调节器参数
self.kp_secondary = kp_secondary
参数整定经验:
- 先整定副回路(纯P控制)
- 再整定主回路(PI控制)
- 遵循"副快主慢"原则
3.3 仿真结果对比
| 指标 | 单级PID | 串联PID | 改进率 |
|---|---|---|---|
| 稳态误差 | 0.0082 | 0.0021 | 74.4% |
| 超调量 | 12.3% | 4.7% | 61.8% |
| 调节时间(s) | 18.6 | 9.2 | 50.5% |
4. 工程实践要点
4.1 参数整定技巧
-
副回路整定:
- 优先保证快速性
- 比例系数可适当激进
- 通常不加积分项(避免振荡)
-
主回路整定:
- 重点关注稳定性
- 积分时间设为对象主导时间常数的0.5-1倍
- 可加入微分项抑制超调
4.2 常见问题处理
问题1:副回路振荡严重
- 检查采样周期是否过小
- 降低副调节器比例增益
- 添加低通滤波环节
问题2:主回路响应迟缓
- 确认主副回路周期比≥5
- 适当提高主调节器积分增益
- 检查对象时间常数辨识是否准确
4.3 代码优化建议
- 抗积分饱和处理:
python复制# 在主调节器更新中加入积分限幅
integral_limit = 2.0
self.integral_main = np.clip(self.integral_main, -integral_limit, integral_limit)
- 数据记录优化:
python复制# 采用稀疏存储节省内存
if t % 1.0 < dt: # 每秒存储一次
self.history.append([t, output, error])
5. 扩展应用方向
- 多回路串联:三级温度-压力-流量控制系统
- 混合结构:串级+前馈复合控制
- 自适应PID:在线参数自整定算法
- 物联网应用:基于MQTT的分布式串级控制
在某智能温室项目中,我们采用串级PID结合LoRa无线传输,实现了对多个温室分区的精准控制。主环控制室温(周期5分钟),副环控制通风量(周期30秒),相比传统控制方式节能23%。