
1. 项目概述与背景
NRF24L01+作为一款经典的2.4GHz无线收发模块,在无人机、遥控设备、物联网等领域应用广泛。相比我之前在51单片机上的实现,STM32平台凭借HAL库的硬件抽象层和更强大的处理能力,能更好地发挥这个模块的性能。这次在四轴飞控项目中的应用,对通信的实时性和可靠性提出了更高要求。
选择HAL库开发主要考虑三点:一是跨STM32系列的可移植性,二是CubeMX可视化配置的便利性,三是避免直接操作寄存器带来的开发效率问题。不过HAL库的封装也带来了一些独特的调试挑战,特别是在中断处理和SPI时序方面。
2. 硬件设计与关键配置
2.1 模块引脚连接方案
NRF24L01+的8个引脚需要正确连接到STM32:
- SPI接口三线制连接:
- SCK → SPI1_SCK(PA5)
- MISO → SPI1_MISO(PA6)
- MOSI → SPI1_MOSI(PA7)
- 控制信号线:
- CSN → PC6(普通GPIO输出)
- CE → PC5(普通GPIO输出)
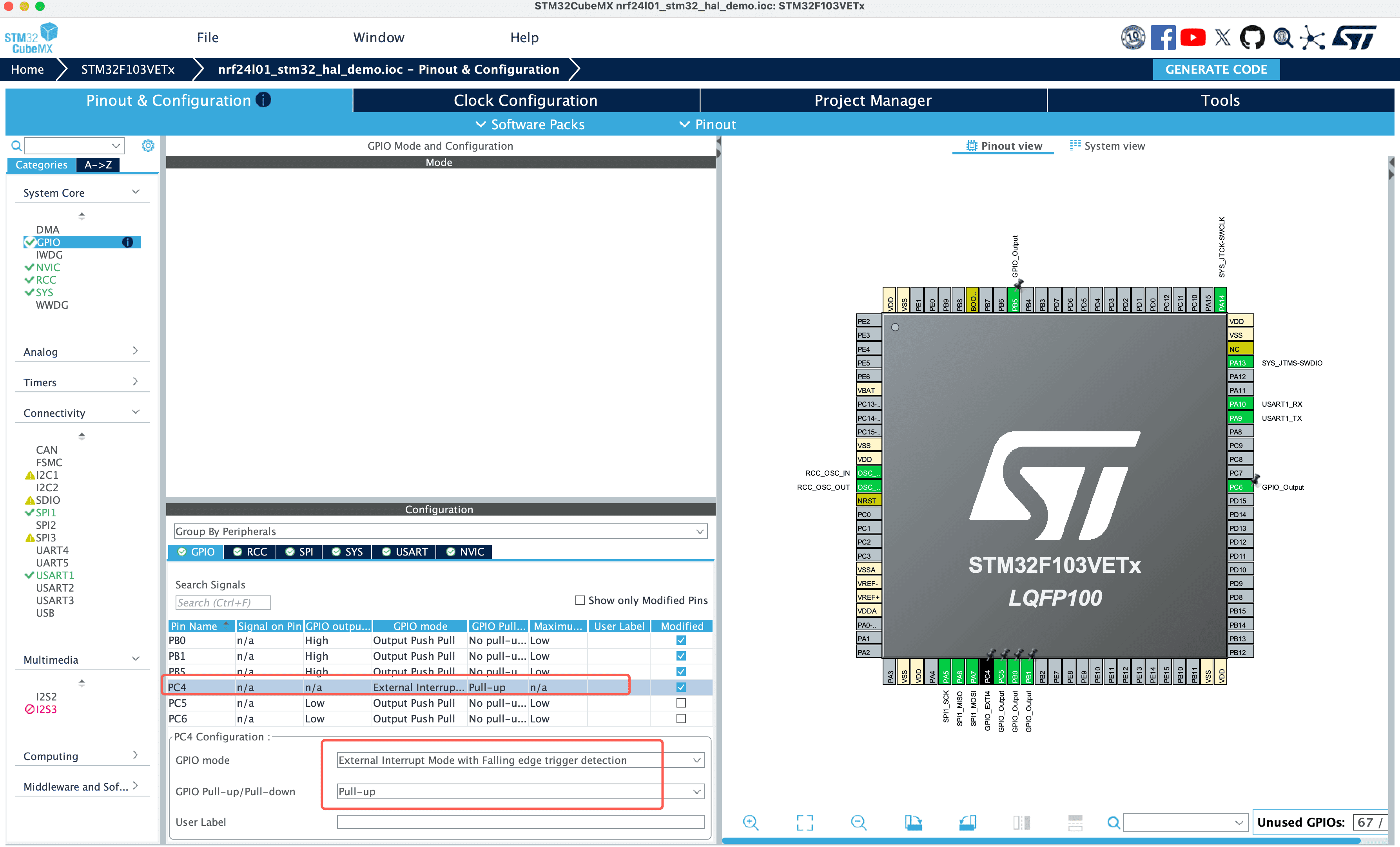
- IRQ → PC4(外部中断输入)
关键提示:IRQ必须配置为下降沿触发!模块默认IRQ为高电平,当触发中断事件(如数据接收完成)时会拉低此引脚。如果错误配置为上升沿触发,将无法正常触发中断。
2.2 CubeMX配置细节
-
SPI1配置:
- Mode: Full-Duplex Master
- Hardware NSS: Disabled(使用软件控制CSN)
- Prescaler: 分频系数根据主频选择,建议先使用PCLK/8
- Clock Polarity: Low
- Clock Phase: 1 Edge
-
GPIO配置:
- PC4(IRQ): GPIO_EXTI4, 下降沿触发,上拉模式
- PC5(CE): GPIO Output, 推挽输出,无上下拉
- PC6(CSN): GPIO Output, 推挽输出,初始高电平
-
中断优先级:
- EXTI4_IRQHandler应设置比SPI中断更高的优先级
- 在NVIC中启用EXTI4中断
3. 驱动实现与核心代码
3.1 寄存器操作基础函数
所有对NRF24L01+的操作都基于这三个底层函数:
c复制// 读取寄存器
uint8_t NRF24_ReadReg(uint8_t reg) {
uint8_t val;
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_RESET);
HAL_SPI_TransmitReceive(&hspi1, ®, &val, 1, 100);
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_SET);
return val;
}
// 写入寄存器
void NRF24_WriteReg(uint8_t reg, uint8_t val) {
uint8_t buf[2] = {reg | NRF_CMD_W_REGISTER, val};
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, buf, 2, 100);
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_SET);
}
// 批量写入
void NRF24_WriteBuf(uint8_t reg, uint8_t *pBuf, uint8_t len) {
uint8_t buf[32];
buf[0] = reg | NRF_CMD_W_REGISTER;
memcpy(buf+1, pBuf, len);
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, buf, len+1, 100);
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_SET);
}
3.2 模块初始化流程
c复制void NRF24_Init(void) {
// 1. 配置CE和CSN初始状态
HAL_GPIO_WritePin(NRF24_CE_PORT, NRF24_CE_PIN, GPIO_PIN_RESET);
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_SET);
// 2. 延时100ms确保电源稳定
HAL_Delay(100);
// 3. 配置基本参数
NRF24_WriteReg(NRF_REG_CONFIG, 0x08); // 上电,CRC使能,16位CRC
NRF24_WriteReg(NRF_REG_EN_AA, 0x01); // 使能通道0自动应答
NRF24_WriteReg(NRF_REG_EN_RXADDR, 0x01); // 使能通道0接收
NRF24_WriteReg(NRF_REG_SETUP_AW, 0x03); // 5字节地址宽度
// 4. 设置通信频率(2.400GHz + RF_CH)
NRF24_WriteReg(NRF_REG_RF_CH, 76); // 2.476GHz
// 5. 配置RF参数
NRF24_WriteReg(NRF_REG_RF_SETUP, 0x07); // 0dBm输出功率,2Mbps速率
// 6. 设置接收地址和有效数据宽度
uint8_t addr[5] = {0x34,0x43,0x10,0x10,0x01};
NRF24_WriteBuf(NRF_REG_RX_ADDR_P0, addr, 5); // 接收地址
NRF24_WriteBuf(NRF_REG_TX_ADDR, addr, 5); // 发送地址
NRF24_WriteReg(NRF_REG_RX_PW_P0, 32); // 接收数据长度32字节
// 7. 清空状态寄存器
NRF24_WriteReg(NRF_REG_STATUS, 0x70);
// 8. 切换至接收模式
NRF24_RX_Mode();
}
3.3 发送/接收模式切换
c复制// 进入接收模式
void NRF24_RX_Mode(void) {
// 1. 清除中断标志
NRF24_WriteReg(NRF_REG_STATUS, 0x70);
// 2. 刷新接收缓冲区
NRF24_WriteReg(NRF_CMD_FLUSH_RX, 0xFF);
// 3. 配置为接收模式
uint8_t config = NRF24_ReadReg(NRF_REG_CONFIG);
NRF24_WriteReg(NRF_REG_CONFIG, config | 0x01);
// 4. 拉高CE启动接收
HAL_GPIO_WritePin(NRF24_CE_PORT, NRF24_CE_PIN, GPIO_PIN_SET);
}
// 进入发送模式
void NRF24_TX_Mode(void) {
// 1. 拉低CE停止接收
HAL_GPIO_WritePin(NRF24_CE_PORT, NRF24_CE_PIN, GPIO_PIN_RESET);
// 2. 配置为发送模式
uint8_t config = NRF24_ReadReg(NRF_REG_CONFIG);
NRF24_WriteReg(NRF_REG_CONFIG, config & 0xFE);
// 3. 刷新发送缓冲区
NRF24_WriteReg(NRF_CMD_FLUSH_TX, 0xFF);
}
4. 数据收发实现
4.1 数据发送流程
c复制uint8_t NRF24_SendPacket(uint8_t *pBuf, uint8_t len) {
// 1. 切换至发送模式
NRF24_TX_Mode();
// 2. 写入待发送数据
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_RESET);
uint8_t cmd = NRF_CMD_W_TX_PAYLOAD;
HAL_SPI_Transmit(&hspi1, &cmd, 1, 100);
HAL_SPI_Transmit(&hspi1, pBuf, len, 100);
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_SET);
// 3. 拉高CE至少10us触发发送
HAL_GPIO_WritePin(NRF24_CE_PORT, NRF24_CE_PIN, GPIO_PIN_SET);
HAL_Delay(1); // 实际使用时可用更精确的延时
HAL_GPIO_WritePin(NRF24_CE_PORT, NRF24_CE_PIN, GPIO_PIN_RESET);
// 4. 等待发送完成或超时
uint32_t timeout = 100; // 100ms超时
while(timeout--) {
uint8_t status = NRF24_ReadReg(NRF_REG_STATUS);
if(status & 0x20) { // TX_DS发送成功
NRF24_WriteReg(NRF_REG_STATUS, status | 0x20);
return 1;
}
if(status & 0x10) { // MAX_RT达到最大重试次数
NRF24_WriteReg(NRF_REG_STATUS, status | 0x10);
NRF24_WriteReg(NRF_CMD_FLUSH_TX, 0xFF);
return 0;
}
HAL_Delay(1);
}
return 0;
}
4.2 数据接收处理
c复制// 外部中断回调函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {
if(GPIO_Pin == NRF24_IRQ_PIN) {
uint8_t status = NRF24_ReadReg(NRF_REG_STATUS);
if(status & 0x40) { // RX_DR接收到数据
NRF24_ReadPacket(rx_buf, 32);
NRF24_WriteReg(NRF_REG_STATUS, status | 0x40);
// 在这里处理接收到的数据
// 例如通过串口转发或设置标志位
}
}
}
// 读取接收到的数据
void NRF24_ReadPacket(uint8_t *pBuf, uint8_t len) {
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_RESET);
uint8_t cmd = NRF_CMD_R_RX_PAYLOAD;
HAL_SPI_Transmit(&hspi1, &cmd, 1, 100);
HAL_SPI_Receive(&hspi1, pBuf, len, 100);
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_SET);
// 刷新接收缓冲区
NRF24_WriteReg(NRF_CMD_FLUSH_RX, 0xFF);
}
5. 调试经验与常见问题
5.1 SPI通信问题排查
-
无响应或返回全0xFF:
- 检查CSN引脚是否正常拉低
- 确认SPI时钟极性(CPOL)和相位(CPHA)设置正确
- 测量SCK信号是否正常输出(示波器观察)
- 降低SPI时钟频率测试(尝试PCLK/16或更低)
-
数据错位或乱码:
- 检查MISO/MOSI接线是否交叉
- 确保SPI模式与模块要求一致(模式0或3)
- 增加SPI传输间的延时(特别是连续读写时)
实测发现:HAL_SPI_TransmitReceive在高速模式下可能不稳定,建议在关键操作后添加1us左右的延时。
5.2 通信距离优化
-
参数调整:
c复制// 在NRF_REG_RF_SETUP中设置: // 0x06 = -12dBm, 250kbps (最大距离) // 0x07 = 0dBm, 2Mbps (默认) // 0x0E = 0dBm, 1Mbps NRF24_WriteReg(NRF_REG_RF_SETUP, 0x06); -
硬件改进:
- 为模块添加PCB天线或外接天线
- 电源端并联100uF+0.1uF电容
- 避免模块靠近电机等干扰源
5.3 典型问题解决方案
-
频繁丢包:
- 检查通道是否干净(用频谱分析仪)
- 增加自动重发次数和延时:
c复制// 设置自动重发延时250us+86us*5=680us,重试15次 NRF24_WriteReg(NRF_REG_SETUP_RETR, 0x5F);
-
中断不触发:
- 确认IRQ引脚配置为下降沿触发
- 检查是否在CubeMX中启用了对应EXTI中断
- 在中断服务函数中清除Pending标志
-
功耗异常高:
- 确保不通信时将CE拉低
- 考虑使用电源管理模式:
c复制void NRF24_PowerDown(void) { uint8_t config = NRF24_ReadReg(NRF_REG_CONFIG); NRF24_WriteReg(NRF_REG_CONFIG, config & 0xFC); HAL_GPIO_WritePin(NRF24_CE_PORT, NRF24_CE_PIN, GPIO_PIN_RESET); }
6. 进阶应用技巧
6.1 多通道通信配置
NRF24L01+支持6个接收通道,可实现一对多通信:
c复制// 设置通道1接收地址
uint8_t addr1[5] = {0x34,0x43,0x10,0x10,0x02};
NRF24_WriteBuf(NRF_REG_RX_ADDR_P1, addr1, 5);
NRF24_WriteReg(NRF_REG_EN_RXADDR, 0x03); // 使能通道0和1
// 设置不同通道的数据长度
NRF24_WriteReg(NRF_REG_RX_PW_P0, 32); // 通道0接收32字节
NRF24_WriteReg(NRF_REG_RX_PW_P1, 16); // 通道1接收16字节
6.2 动态负载长度
启用动态负载功能可以接收不同长度的数据包:
c复制// 启用动态负载长度
NRF24_WriteReg(NRF_REG_FEATURE, 0x04);
NRF24_WriteReg(NRF_REG_DYNPD, 0x01); // 通道0动态负载
// 接收时先读取负载长度
uint8_t len;
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_RESET);
uint8_t cmd = 0x60; // R_RX_PL_WID
HAL_SPI_TransmitReceive(&hspi1, &cmd, &len, 1, 100);
HAL_GPIO_WritePin(NRF24_CSN_PORT, NRF24_CSN_PIN, GPIO_PIN_SET);
if(len > 0 && len <= 32) {
NRF24_ReadPacket(rx_buf, len);
}
6.3 低功耗设计
对于电池供电设备,可结合STM32的低功耗模式:
c复制void Enter_LowPowerMode(void) {
// 配置NRF24L01+为待机模式
HAL_GPIO_WritePin(NRF24_CE_PORT, NRF24_CE_PIN, GPIO_PIN_RESET);
// 配置STM32进入STOP模式
HAL_SuspendTick();
HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI);
// 唤醒后重新初始化时钟
SystemClock_Config();
HAL_ResumeTick();
// 恢复NRF24L01+通信
NRF24_Init();
}
在实际四轴飞控项目中,我将遥控器端的NRF24L01+配置为250kbps速率、-12dBm发射功率,配合PCB天线实现了约150米的稳定控制距离。关键是要处理好电机PWM信号对2.4GHz信号的干扰,我的做法是:
- 将模块远离电调线路
- 电源端增加LC滤波
- 在软件上错开PWM更新和无线通信的关键时序