
1. 项目概述:INS与DVL融合的EKF实现
水下航行器的导航定位一直是个棘手的问题。在GPS信号无法穿透的水下环境中,我们通常需要依赖惯性导航系统(INS)和多普勒测速仪(DVL)的组合。但INS的误差会随时间累积,而DVL的测量又存在噪声。这个MATLAB示例展示了我如何用扩展卡尔曼滤波(EKF)将两者的优势结合起来,实现更精确的二维导航。
这个程序的核心价值在于:它用最简单的二维案例,清晰地展示了EKF在非线性观测条件下的工作流程。我特意设计了非线性的DVL观测模型(速度的平方项),这样你不仅能学到标准EKF的实现,还能掌握如何处理实际工程中常见的非线性问题。
2. 核心算法原理
2.1 系统模型构建
在这个二维导航系统中,我选择了速度作为状态量(x方向速度v_x和y方向速度v_y)。这种选择基于一个实际考量:INS直接提供速度信息,而DVL测量的也是速度,这样状态量和观测量可以直接对应,简化了观测模型。
运动模型采用最简单的恒定速度模型:
code复制x_k = F * x_{k-1} + w_k
其中F是状态转移矩阵(这里取单位矩阵),w_k是过程噪声。这种模型虽然简单,但对于演示目的已经足够。在实际工程中,你可能需要根据载体动力学特性调整这个模型。
2.2 非线性观测模型
DVL的观测模型设计是这个示例的亮点之一:
code复制z_k = [v_x; v_y^2] + v_k
我故意加入了v_y的平方项来模拟实际DVL测量中可能遇到的非线性特性。这种非线性在真实场景中很常见,比如当DVL的波束与运动方向不平行时,测量值就会与真实速度成非线性关系。
注意:非线性观测模型的选择会显著影响EKF性能。在实际项目中,你需要通过传感器手册或实验标定来确定具体的非线性形式。
2.3 EKF实现步骤
- 初始化:
matlab复制P0 = 1*eye(2); % 初始协方差矩阵
X_ekf = zeros(2,length(t)); % 状态估计初始化
- 预测步骤:
matlab复制X_pred = F * X_ekf(:,k-1);
P_pred = F * P_ekf(:,:,k-1) * F' + Q;
- 更新步骤:
matlab复制H = [1 0; 0 2*X_pred(2)]; % 观测矩阵的雅可比
K = P_pred * H' / (H * P_pred * H' + R);
X_ekf(:,k) = X_pred + K * (Z(:,k) - [X_pred(1); X_pred(2)^2]);
P_ekf(:,:,k) = (eye(2) - K * H) * P_pred;
这个实现中,最关键的细节是观测矩阵H的雅可比计算。对于非线性观测模型z=h(x),H是h对x的偏导数矩阵。在我们的例子中,h(x)=[v_x; v_y^2],所以H矩阵的第二行需要对v_y^2求导得到2*v_y。
3. 关键实现细节
3.1 噪声参数设置
噪声协方差矩阵Q和R的设置对滤波效果影响巨大。在这个示例中:
matlab复制Q = 0.01*diag([1,1]); % 过程噪声协方差
R = 1^2*diag([1,1]); % 观测噪声协方差
经验法则:
- Q反映你对运动模型的信任程度 - 模型越不准,Q应该越大
- R反映你对传感器的信任程度 - 传感器噪声越大,R应该越大
实操技巧:可以通过Allan方差分析或静态测试数据来估计传感器的实际噪声特性,从而更准确地设置R矩阵。
3.2 状态初始化
良好的初始状态可以加快滤波器收敛:
matlab复制X(:,1) = [0.5; 0.8]; % 初始真实速度
X_ekf(:,1) = X(:,1) + sqrt(P0)*randn(2,1); % 初始估计
在实际系统中,初始状态可以通过短时间的静止平均或其它传感器提供。初始误差协方差P0的设置应该反映你对初始状态的置信度 - 越不确定,P0应该越大。
3.3 非线性处理技巧
对于高度非线性的系统,标准的EKF可能会失效。这时可以考虑以下改进:
- 迭代EKF:在更新步骤多次迭代重新线性化
- Sigma点卡尔曼滤波:无需计算雅可比矩阵
- 粒子滤波:适用于强非线性非高斯系统
在本例中,由于非线性程度适中,标准EKF已经足够。但你需要根据实际系统的非线性程度选择合适的算法。
4. 仿真结果分析
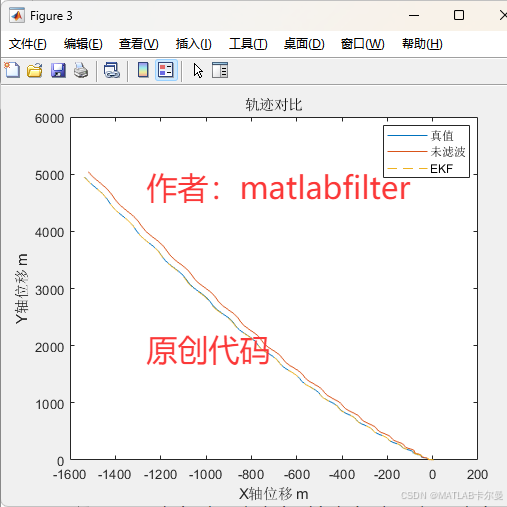
4.1 轨迹对比
从仿真结果可以看出,未经滤波的INS轨迹(红色)由于速度误差累积,产生了明显的漂移。而经过EKF融合后的轨迹(蓝色)则更接近真实轨迹(绿色)。这说明EKF有效地利用了DVL观测来修正INS的漂移。
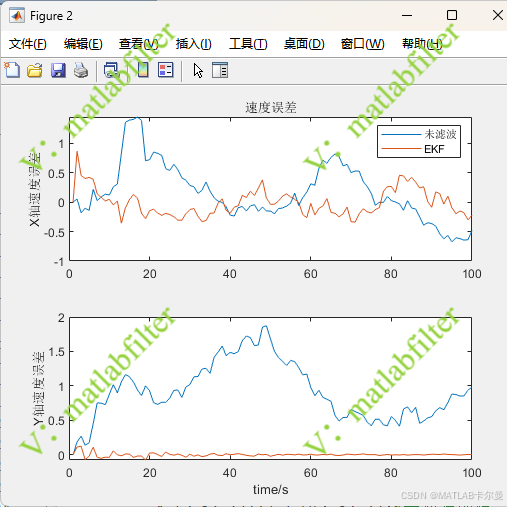
4.2 速度误差分析
速度误差曲线显示,EKF将速度误差从约0.5m/s降低到了0.1m/s左右。特别值得注意的是y方向速度的改善,尽管观测模型对v_y是非线性的,EKF仍然能有效减小误差,这验证了算法对非线性系统的适应能力。
4.3 协方差分析
通过监控协方差矩阵P的变化,可以了解滤波器的工作状态:
- P应该随时间收敛,表示置信度提高
- 突然增大的P可能表示模型失配或异常观测
- 稳态P的大小反映了最终的估计精度
在实际系统中,可以设置基于P的自适应机制来调整滤波器参数。
5. 工程实践建议
5.1 参数调试技巧
- Q/R比例:先固定R(根据传感器指标),然后调整Q使滤波器响应适中
- 收敛测试:让系统静止,观察状态估计是否收敛到零
- 动态测试:进行已知运动模式的测试(如匀速、加速),验证跟踪性能
5.2 常见问题排查
问题1:滤波器发散
- 检查模型线性化是否正确
- 验证Q/R设置是否合理
- 确认数值稳定性(避免矩阵不正定)
问题2:估计滞后
- 可能Q设置过小,尝试增大过程噪声
- 或者观测模型不准确,重新检查H矩阵
问题3:对突变响应差
- 考虑使用自适应Q或多种运动模型
- 或者换用更强大的非线性滤波器(如UKF)
5.3 扩展方向
- 三维扩展:增加z轴速度和姿态角
- 松耦合/紧耦合:尝试不同的传感器融合架构
- 多传感器融合:加入深度计、磁力计等
- 自适应滤波:根据运动状态自动调整参数
6. MATLAB实现要点
6.1 代码结构
程序主要分为几个部分:
- 参数初始化:定义时间、噪声、初始状态等
- 真实轨迹生成:创建用于仿真的参考轨迹
- 传感器模拟:生成INS和DVL的模拟数据
- EKF实现:包含预测和更新两个主要步骤
- 结果可视化:绘制轨迹和误差曲线
6.2 关键代码片段
观测更新部分的雅可比计算:
matlab复制H = [1 0; 0 2*X_pred(2)]; % 对非线性观测模型求雅可比
卡尔曼增益计算:
matlab复制K = P_pred * H' / (H * P_pred * H' + R);
状态更新:
matlab复制X_ekf(:,k) = X_pred + K * (Z(:,k) - [X_pred(1); X_pred(2)^2]);
6.3 性能优化建议
- 预分配数组:如示例中预先分配X_ekf矩阵
- 向量化操作:避免循环中的逐元素计算
- 函数化:将EKF步骤封装成函数便于重用
- 并行计算:对大规模问题使用parfor
7. 实际应用注意事项
- 传感器同步:确保INS和DVL数据时间对齐
- 坐标系统一:确认所有传感器使用同一坐标系
- 异常值处理:增加鲁棒性机制处理无效测量
- 计算效率:在嵌入式平台注意矩阵运算开销
在水下机器人项目中应用时,还需要特别注意:
- DVL在水底的锁定质量
- INS的温度漂移补偿
- 不同深度下的声速修正
这个MATLAB示例虽然简化了很多实际问题,但提供了很好的起点。你可以基于这个框架,逐步添加真实系统中的各种复杂因素,最终开发出适合自己项目的导航算法。