
1. 有源功率解耦(APD)技术概述
在电力电子系统中,功率波动和纹波问题一直是工程师们需要解决的核心挑战。作为一名从事电源设计十余年的工程师,我见证了大容量电解电容从"标配"到逐渐被有源功率解耦技术替代的过程。APD技术通过创新的控制策略和电路设计,实现了用更小的电容容量达到更好的纹波抑制效果。
传统方案中,我们习惯在直流母线并联大容量电解电容(通常是几百到几千微法)来吸收功率波动。这种方法虽然简单直接,但带来的体积、成本和可靠性问题日益突出。特别是在消费电子领域,设备小型化趋势使得电路板空间变得极其珍贵。我曾在某款智能家居电源模块设计中,仅电解电容就占据了30%的PCB面积,这促使我开始深入研究APD技术。
APD的核心价值在于它打破了"电容越大滤波效果越好"的传统认知。通过实时监测功率波动并主动控制补偿电流,可以用小一个数量级的电容(通常只需几十纳法到几微法)实现相同甚至更好的纹波抑制效果。这种技术特别适合对体积敏感的应用场景,如USB PD快充、LED驱动电源等。
2. 纹波产生机理与抑制原理
2.1 纹波产生的本质原因
在单相AC-DC变换器中,输入功率呈现100Hz(对于50Hz电网)的脉动特性。以常见的全桥整流电路为例,即使经过整流滤波,直流侧功率仍会保留两倍工频的波动分量。这种波动直接导致直流母线电压出现纹波,其幅值可由以下公式估算:
ΔV = (P_pk - P_avg) / (2πfC)
其中P_pk为峰值功率,P_avg为平均功率,f为纹波频率,C为滤波电容容值。当使用传统大电容方案时,为了将纹波控制在允许范围内(如±5%),往往需要选择超大容量的电解电容。
2.2 有源解耦的工作原理
APD技术的关键创新在于将被动滤波转变为主动补偿。系统通过实时检测功率差值(P_in - P_out),控制一个辅助电路(通常是Buck-Boost或Flyback拓扑)产生精确的补偿电流。这个补偿电流与纹波电流相位相反,从而在数学上实现:
i_comp(t) = -i_ripple(t)
在实际电路实现中,通常会采用电流模式控制策略。以数字控制为例,控制流程包括:
- 采样直流母线电压V_dc
- 计算电压误差ΔV = V_ref - V_dc
- 通过PI调节器生成电流指令I_ref
- 采用PWM调制驱动开关管
重要提示:补偿电路的响应速度必须显著高于纹波频率,通常要求带宽至少达到纹波频率的5-10倍。对于100Hz纹波,控制环路带宽应设计在500Hz以上。
3. 典型APD电路实现方案
3.1 半桥式APD电路
半桥结构是最常见的APD实现方式之一,其典型电路如图1所示。该方案使用两个开关管(通常为MOSFET)和一个小容量薄膜电容(1-10μF)构成能量缓冲通道。工作时,两个开关管互补导通,通过调节占空比来控制电容的充放电电流。
这种方案的优点在于:
- 电路结构简单,成本较低
- 可实现双向能量流动
- 控制策略相对成熟
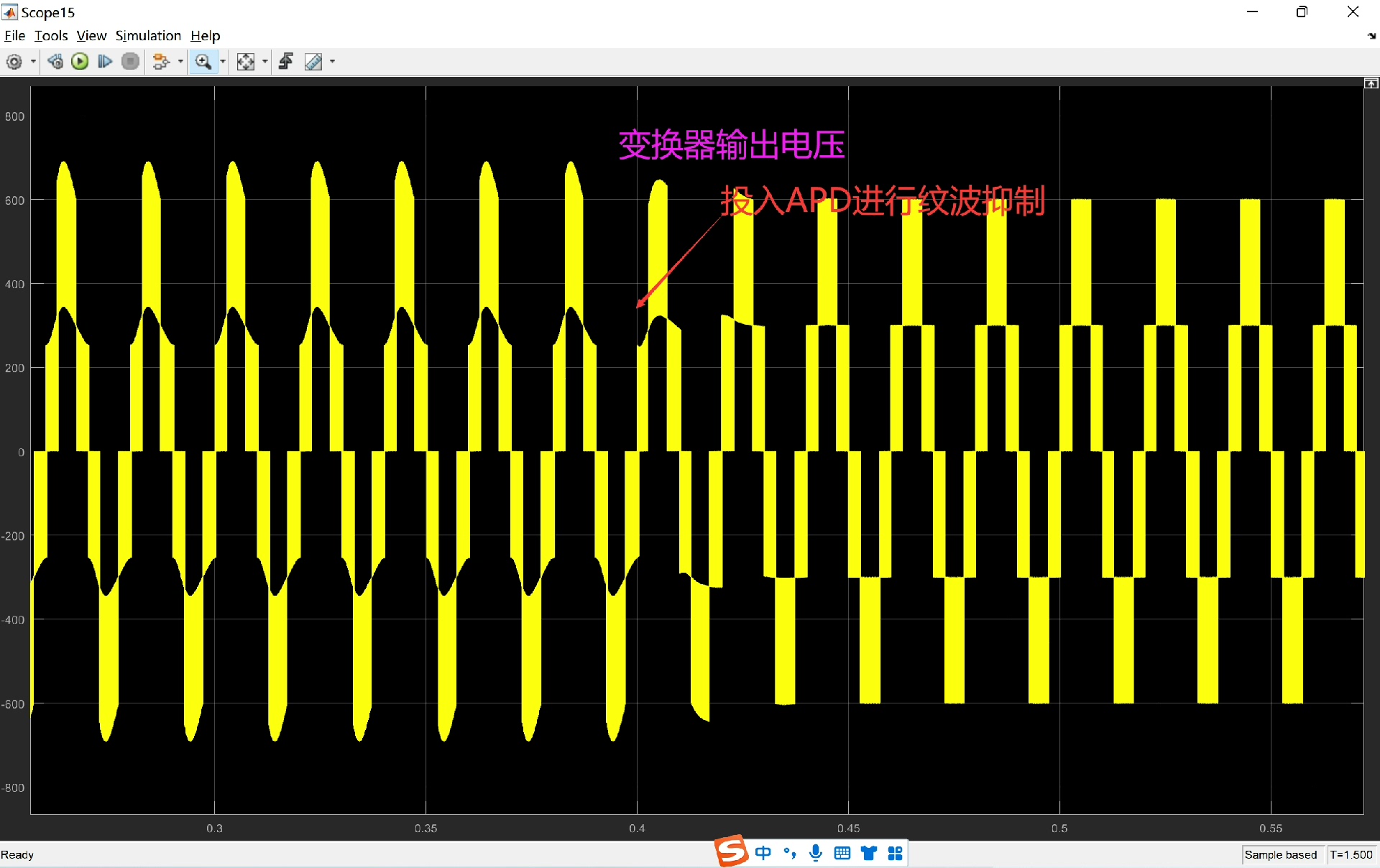
我在某工业电源项目中实测数据显示,采用2.2μF的CBB电容配合半桥APD,可将300V直流母线的纹波从±15V降低到±1.5V,效果媲美使用470μF电解电容的传统方案。
3.2 三电平APD方案
对于高压应用(如光伏逆变器的DC-link),三电平APD方案表现出更好的性能。该方案通过增加开关管和电容数量,实现了:
- 开关器件电压应力减半
- 输出纹波电流更小
- EMI特性改善
其实施难点在于:
- 需要更复杂的驱动电路
- 电容电压平衡控制
- 死区时间优化
下表对比了不同APD方案的性能指标:
| 方案类型 | 电容容值 | 效率 | 成本 | 适用功率范围 |
|---|---|---|---|---|
| 半桥式 | 1-10μF | 92-95% | 低 | <500W |
| 全桥式 | 0.5-5μF | 90-93% | 中 | 500W-2kW |
| 三电平 | 0.1-2μF | 93-96% | 高 | >1kW |
4. 控制算法实现细节
4.1 基于瞬时功率理论的控制
最常用的控制策略是基于pq理论的瞬时功率计算。算法实现步骤如下:
- 采集交流侧电压v_ac和电流i_ac
- 计算瞬时功率p(t)=v_ac×i_ac
- 通过低通滤波器提取直流分量P_dc
- 计算波动功率p~ = p(t) - P_dc
- 生成补偿电流指令i_comp* = p~ / V_dc
在数字控制器(如DSP)中实现时,需要注意:
- 采样同步问题(建议采用过零检测触发采样)
- 滤波器设计(二阶Butterworth滤波器截止频率通常设为20Hz)
- 抗混叠处理(前置RC滤波器截止频率应≤1/2采样频率)
4.2 预测控制算法进阶
对于高性能应用,模型预测控制(MPC)展现出优势。其核心是通过建立系统模型,预测未来几个开关周期内的行为,并选择最优开关组合。实现流程:
python复制# 简化的MPC算法伪代码
def mpc_control(current_state, reference):
candidates = generate_switching_sequences() # 生成可能的开关序列
costs = []
for seq in candidates:
predicted = model.predict(current_state, seq) # 预测状态
cost = calculate_cost(predicted, reference) # 计算代价函数
costs.append(cost)
optimal_idx = np.argmin(costs) # 选择最优序列
return candidates[optimal_idx][0] # 返回第一个控制量
实际工程中需要权衡预测步长和计算复杂度。通常3-5步预测能在TI C2000系列DSP上实现10kHz级别的控制频率。
5. 关键设计考量与调试技巧
5.1 电容选型原则
虽然APD大幅降低了电容容值要求,但电容的品质直接影响系统性能。建议:
-
优先选择薄膜电容(如MKP、CBB系列)
- 低ESR(<10mΩ)
- 高耐纹波电流能力
- 温度特性稳定
-
避免使用电解电容
- ESR随温度变化大
- 寿命较短(特别是高温环境下)
-
容值计算经验公式:
C_min = (P_max - P_min) / (4πf·ΔV_max·V_dc)
其中ΔV_max为允许的最大电压波动。
5.2 常见问题排查指南
在实际调试中,工程师常遇到以下问题:
问题1:补偿效果不理想
- 检查电流采样相位是否准确
- 验证控制环路带宽(应≥5倍纹波频率)
- 确认PWM死区时间设置合理(通常100-200ns)
问题2:系统振荡
- 降低PI调节器的比例增益
- 增加电流环阻尼(可加入微分项)
- 检查布局,缩短功率回路(特别是栅极驱动路径)
问题3:效率偏低
- 优化开关管选型(关注Qg和Coss参数)
- 调整开关频率(通常20-100kHz最佳)
- 改进散热设计(MOSFET温升应<40℃)
6. 工程应用实例分析
6.1 智能照明驱动案例
在某LED路灯驱动项目中,我们采用APD技术实现了:
- 电容体积减少80%(从2×1000μF电解电容变为1μF薄膜电容)
- 系统效率提升3%(从89%到92%)
- MTBF预计提高5倍(电解电容是传统方案的薄弱环节)
关键设计参数:
- 输出功率:150W
- 开关频率:65kHz
- 控制芯片:TI UCC28064
- 补偿电容:1μF/630V MKP
6.2 电动汽车OBC应用
车载充电器(OBC)对体积和可靠性要求极高。某6.6kW OBC设计采用APD后:
- 省去了3个450V/680μF电解电容
- 功率密度提升到3.2W/cm³
- 通过ISO 16750-2电压波动测试
特殊考虑因素:
- 宽输入电压范围(90-264VAC)
- 高环境温度要求(-40℃~105℃)
- 严格的EMC标准(CISPR 25 Class 5)
7. 未来技术发展方向
从近年来的研究趋势看,APD技术正在向以下方向发展:
-
宽禁带器件应用
- SiC MOSFET可工作在高频(>200kHz)
- GaN器件实现更高功率密度
-
集成化解决方案
- 将APD功能集成到PFC控制器中
- 智能功率模块(IPM)内置解耦电路
-
人工智能辅助优化
- 机器学习算法自动整定参数
- 数字孪生技术实现预测性维护
在实际工程中采用APD技术时,建议从小功率应用开始积累经验。我的体会是,成功的APD设计需要平衡控制算法复杂度与实现成本,同时要特别关注环路稳定性问题。对于刚接触APD的工程师,可以先从成熟的参考设计入手,逐步理解其工作原理后再进行自主创新。