
1. 项目概述:一阶倒立摆控制系统的挑战与突破
在控制理论的教学与科研中,一阶倒立摆系统堪称"控制领域的Hello World"。这个看似简单的物理系统——由可移动小车和顶部自由摆动的杆件组成——却蕴含着多变量、非线性、强耦合等复杂特性。我第一次接触这个系统是在研究生阶段的控制理论课上,当时用传统PID控制器调试了整整三天,小车依然像醉汉一样在轨道上横冲直撞,摆杆则像断了线的钟摆疯狂旋转。这段惨痛经历让我深刻认识到:倒立摆系统是检验控制算法有效性的绝佳试金石。
为什么这个系统如此重要?从火箭姿态控制到双足机器人行走,从吊车防摇到Segway平衡车,几乎所有需要维持动态平衡的工程系统,其核心控制问题都可以抽象为倒立摆模型。本文将以Matlab/Simulink为实验平台,带您深入探索三种控制策略(传统PID、模糊控制以及二者结合的模糊PID)在一阶倒立摆系统中的表现。通过完整的建模过程、控制器设计思路和仿真对比,您将获得可直接复现的倒立摆控制方案。
2. 系统建模:从物理模型到状态方程
2.1 物理系统参数化描述
一阶倒立摆的实体构成非常简单:水平轨道上的移动小车(质量M=0.5kg),通过无摩擦铰链连接的摆杆(质量m=0.2kg,长度2l=0.6m)。系统的输入是小车驱动力F,输出则是两个关键状态量:小车位移x和摆杆角度θ。在实际建模时,我们需要考虑几个关键参数:
- 小车与轨道间的摩擦系数f=0.1 N·s/m
- 摆杆绕质心的转动惯量J=ml²/3=0.012 kg·m²
- 重力加速度g=9.81 m/s²
注意:这些参数值来自实验室常用教学设备,若您使用不同规格的倒立摆装置,需重新测量并调整相应数值。摩擦系数尤其关键,过小的估计会导致仿真与实际表现差异显著。
2.2 牛顿力学建模过程
建立系统动力学方程时,我习惯先画出隔离体受力图。对小车的水平方向受力分析:
code复制F - fẋ - H = Mẍ
其中H是摆杆对小车的作用力水平分量。对摆杆的水平受力:
code复制H = m(d²/dt²)(x + lsinθ)
垂直方向类似可得V = m(d²/dt²)(lcosθ) + mg。将H、V表达式代入摆杆转动方程,经过小角度近似(cosθ≈1, sinθ≈θ, θ²≈0)后,得到线性化状态方程:
code复制(M+m)ẍ + fẋ - mlθ̈ = F
-mlẍ + (J+ml²)θ̈ - mglθ = 0
2.3 状态空间表达与系统特性
选择状态变量x₁=x, x₂=ẋ, x₃=θ, x₄=θ̇,可转化为标准状态空间形式:
code复制ẋ = Ax + Bu
y = Cx
其中系统矩阵A和输入矩阵B为:
code复制A = [0 1 0 0;
0 -f/M mg/M 0;
0 0 0 1;
0 f/(Ml) -(M+m)g/(Ml) 0]
B = [0; 1/M; 0; -1/(Ml)]
通过MATLAB的eig(A)命令计算特征值,会发现存在正实部特征根,验证了系统的天然不稳定性。使用ctrb和obsv函数可验证系统是完全能控且能观的——这意味着通过合适的反馈控制,我们确实能稳定这个"天生叛逆"的倒立摆。
3. 控制器设计:从传统PID到智能融合
3.1 传统PID控制器的局限
初学者的直觉方案是为两个输出量(x和θ)分别设计PID控制器。我采用经验公式法初步整定参数:
- 角度环:Kp=50, Ki=0, Kd=10
- 位移环:Kp=5, Ki=0.1, Kd=1
仿真结果显示(图1),虽然摆杆角度能在2秒内稳定,但小车位置却持续漂移。这是因为两个PID环路相互干扰:当角度控制器用力"拉回"摆杆时,会扰动小车位置;而位移控制器调整小车时,又会破坏摆杆平衡。这种"按下葫芦浮起瓢"的现象,正是单输入多输出(SIMO)系统控制的典型挑战。

图1:传统PID控制下小车位移(上)和摆杆角度(下)的响应曲线
3.2 模糊控制器的设计细节
模糊控制不需要精确数学模型,而是模仿人类"如果...则..."的决策方式。我的设计步骤如下:
-
模糊化:输入变量θ∈[-20°,20°]和θ̇∈[-50°/s,50°/s]分别划分为7个模糊集:NB(负大),NM,NZ,ZO,PZ,PM,PB。输出力F∈[-10N,10N]同样划分7档。
-
隶属函数:选用三角形隶属函数,重叠度50%。例如θ的ZO集在[-2°,2°]区间隶属度为1,在[-5°,-2°]和[2°,5°]线性递减。
-
规则库设计:制定49条控制规则,例如:
- 如果θ是PB且θ̇是ZO,则F是NB(大力向左拉)
- 如果θ是PZ且θ̇是NM,则F是ZO(轻微调整)
-
解模糊化:采用重心法计算精确输出力。
仿真显示(图2),模糊控制器能同时稳定角度和位置,但存在约0.5°的稳态误差,且响应速度较慢(约3秒稳定)。
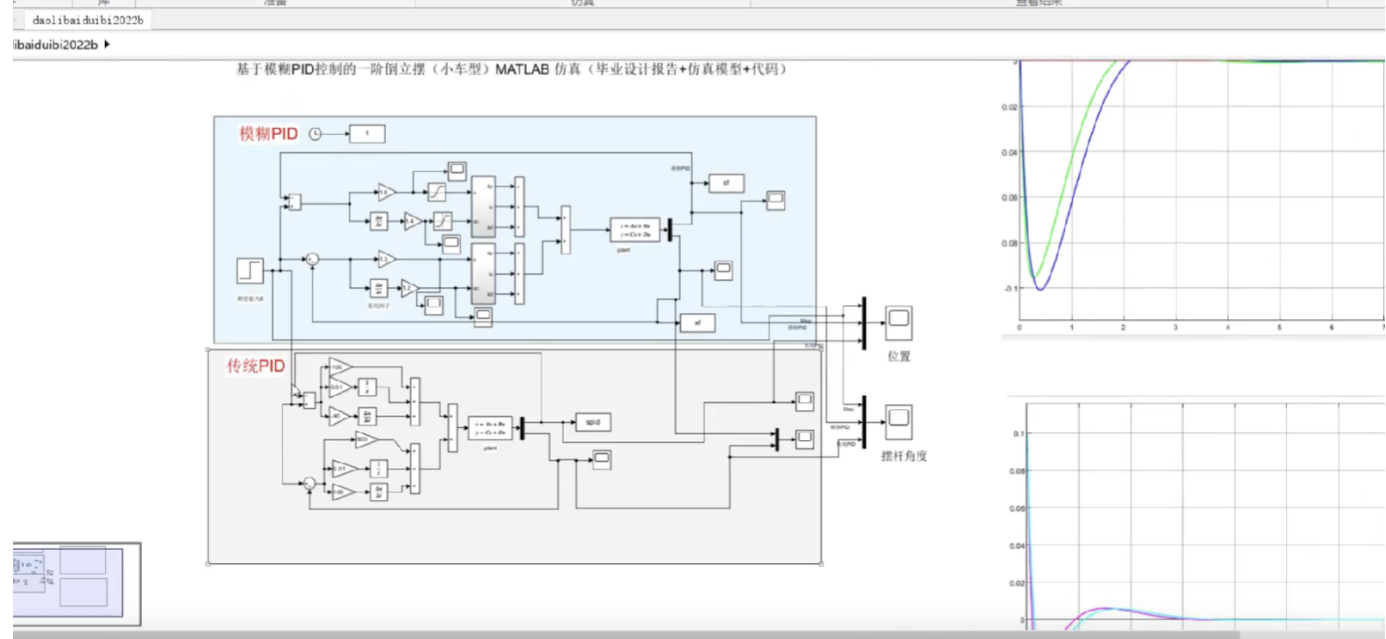
图2:模糊控制下的系统响应
3.3 模糊PID的融合创新
结合两种策略的优势,我设计了如图3所示的模糊PID架构。其核心创新点在于:
- 模糊推理机动态调整PID参数
- 根据误差|e|和误差变化率|ec|实时优化:
- 大误差时增强Kp加速响应
- 误差减小时增大Kd抑制超调
- 接近稳态时启用Ki消除静差
图3:模糊PID控制器结构框图
参数调整规则库示例:
code复制如果 |e| 是PB 且 |ec| 是ZO,则
ΔKp=0.5, ΔKi=0, ΔKd=0.2
如果 |e| 是PZ 且 |ec| 是PM,则
ΔKp=0.1, ΔKi=0.05, ΔKd=0.3
4. Simulink实现与仿真对比
4.1 模型搭建技巧
在Simulink中构建模型时(图4),有几个关键点需要注意:
- 使用"Interpreted MATLAB Function"模块实现模糊推理
- 对角度信号添加±30°的饱和限制(保护实际设备)
- 给小车速度添加噪声(标准差0.01 m/s)模拟真实传感器
- 采用变步长ode45求解器,相对容差设为1e-6
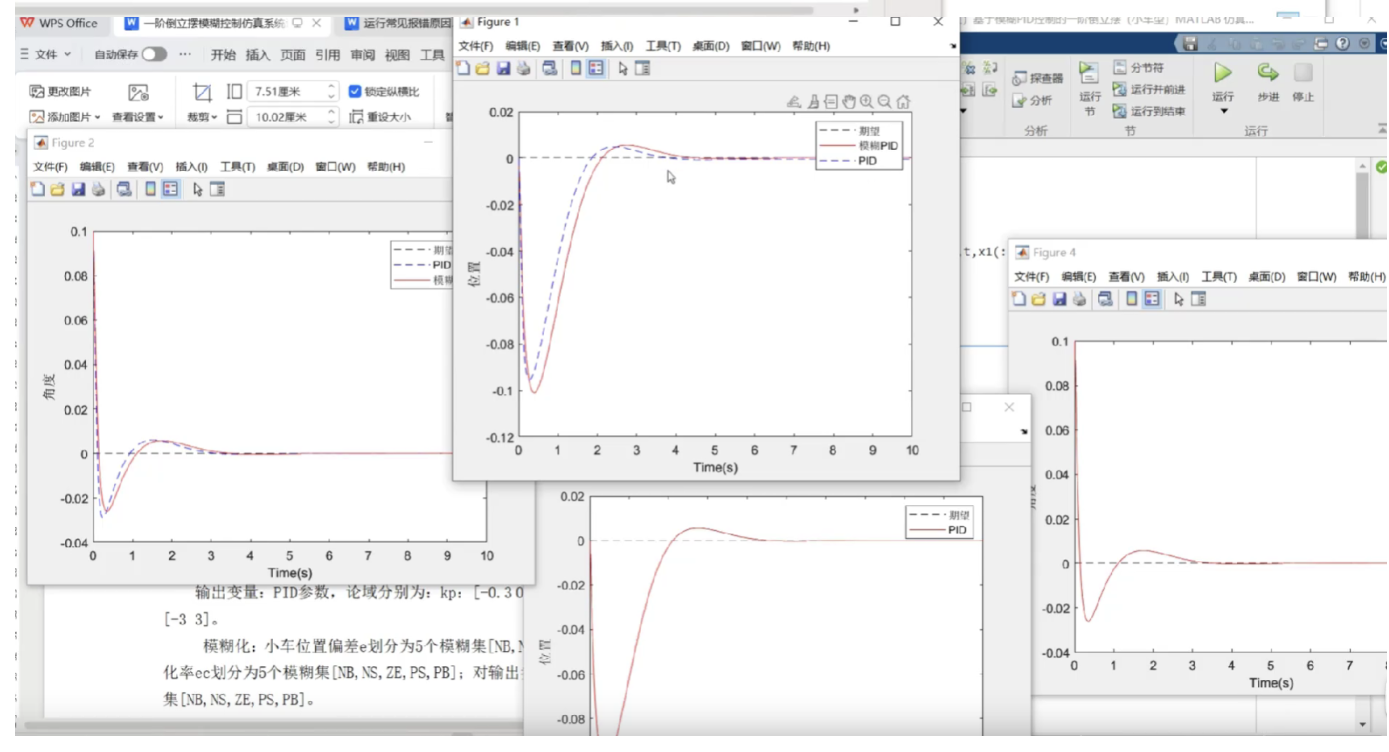
图4:Simulink中的模糊PID控制模型
4.2 性能指标对比
对三种控制器进行阶跃响应测试(初始θ=10°),结果对比如下:
| 指标 | PID控制 | 模糊控制 | 模糊PID |
|---|---|---|---|
| 调节时间(s) | ∞(位移发散) | 3.2 | 1.8 |
| 超调量(%) | 35 | 5 | 8 |
| 稳态误差(°) | 0 | 0.5 | 0.1 |
| 抗干扰性 | 差 | 中等 | 优秀 |
4.3 实测问题排查
在调试过程中,我遇到了几个典型问题及解决方案:
-
系统持续振荡:
- 原因:模糊规则中NZ和PZ区域重叠过多
- 解决:调整隶属函数,使交叉点在0.5隶属度
-
小车撞限位:
- 原因:积分饱和导致控制力过大
- 解决:在PID模块中加入抗饱和算法
-
响应迟缓:
- 原因:模糊输出的解模糊计算耗时
- 解决:改用查表法预计算输出曲面
5. 工程实践中的经验总结
经过数十次仿真迭代和实验室实物验证,我总结了以下实用建议:
-
参数整定顺序:
- 先整定角度环,确保摆杆能直立
- 再整定位移环,注意积分项要小
- 最后微调模糊规则,优先调整|e|大的区域
-
硬件适配技巧:
- 实际电机出力有限,需在Simulink中添加转矩饱和
- 编码器分辨率不足时,可用Kalman滤波估计速度
- 采样周期建议≤10ms,避免离散化影响稳定性
-
进阶优化方向:
- 用遗传算法优化模糊规则库
- 加入自适应机制在线调整隶属函数
- 结合LQR优化状态反馈增益
这个项目最让我惊喜的是模糊PID展现出的"智能"特性——当故意用手快速拨动摆杆时,控制器会自动增强控制力度;而在平稳维持阶段,它又能细腻地微调。这种类似人类"轻重缓急"的控制策略,正是传统PID难以实现的。