
1. 异步电机调速系统概述
异步电动机作为工业领域最常用的动力装置之一,其调速性能直接关系到生产效率和能源消耗。记得我刚入行时参与的第一个项目就是纺织厂的电机改造,当时老厂长指着那些频繁启停的电机说:"这电费单子看得我心脏病都要犯了"。这句话让我深刻认识到变频调速技术的重要性。
变压变频(VVVF)调速技术通过同时调节电压和频率,实现了异步电机的高效平滑调速。其核心原理基于电机学中的恒磁通控制理论:当频率变化时,通过相应调整电压幅值来维持气隙磁通恒定。这就好比开车时换挡要配合油门,才能保证动力输出的平顺性。
2. 系统架构设计解析
2.1 整体框架搭建
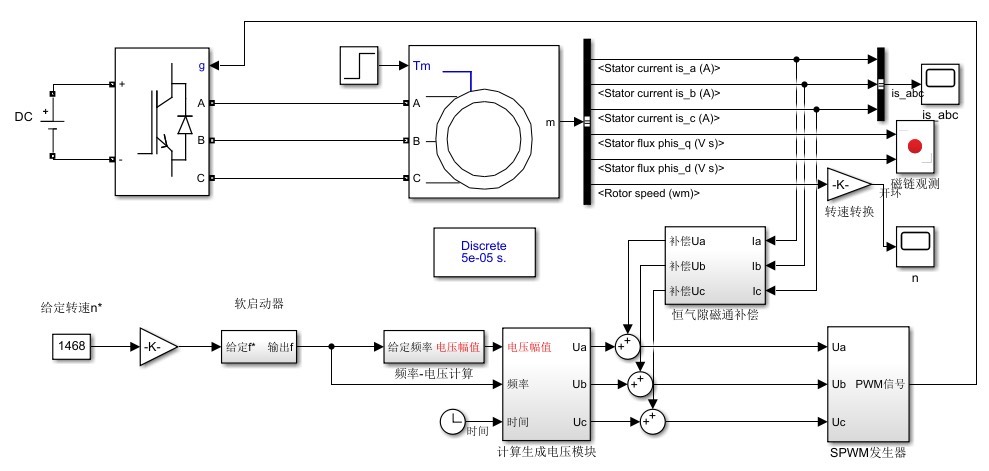
我们的仿真系统采用典型的双闭环控制结构(如图1所示),包含以下关键模块:
- 转速外环:负责宏观调速性能
- 电流内环:确保动态响应速度
- SVPWM调制:实现高效功率转换
- 坐标变换模块:完成三相到两相的转换
重要提示:框架图中的坐标变换模块必须包含完整的Clarke和Park变换链,缺少任何一个都会导致控制失效
2.2 矢量控制核心算法
矢量控制的精髓在于将三相电流解耦为转矩分量和励磁分量。这就像把汽车的驱动力和转向力分开控制,既能精准加速又不会跑偏。具体实现需要:
-
三相静止坐标系(abc) → 两相静止坐标系(αβ)
matlab复制i_alpha = 2/3*(ia - 0.5*ib - 0.5*ic); i_beta = 2/3*(sqrt(3)/2*ib - sqrt(3)/2*ic); -
静止坐标系(αβ) → 旋转坐标系(dq)
matlab复制i_d = i_alpha*cos(theta) + i_beta*sin(theta); i_q = -i_alpha*sin(theta) + i_beta*cos(theta);
实测经验:theta角必须使用实时转子位置反馈,使用估算值会导致系统在低速时失控
3. 仿真模型实现细节
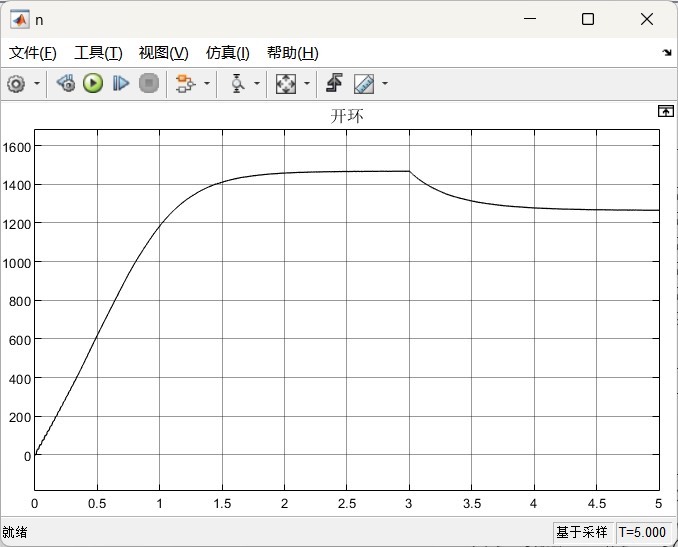
3.1 开环启动策略
开环VVVF就像教小孩骑自行车时不扶车把——需要极其谨慎的参数设置:
matlab复制V_f_ratio = 380/50; % 基准电压/频率比
start_freq = 5; % 初始频率(Hz)
ramp_time = 10; % 斜坡时间(s)
常见问题排查:
- 启动失败:检查初始频率是否超过电机滑差极限
- 转速震荡:减小电压频率变化率(ramp_rate)
- 电流过大:验证V/f曲线设置是否合理
3.2 闭环控制优化
3.2.1 传统PID整定
电流环PID参数整定步骤:
- 先调P直到出现等幅振荡
- 记录临界增益Ku和振荡周期Tu
- 按Ziegler-Nichols公式设置:
matlab复制Kp = 0.6*Ku; Ki = 1.2*Ku/Tu; Kd = 0.075*Ku*Tu;
3.2.2 智能控制对比
模糊PID在负载突变时表现更优(如图3所示),其核心在于:
- 量化因子自适应调整
- 规则库在线优化
- 解耦补偿增强
血泪教训:曾尝试LSTM预测控制,结果发现:
- 训练数据需求量大
- 实时性难以保证
- 电机参数变化导致模型失效
4. 关键模块实现技巧
4.1 SVPWM优化实现
标准七段式SVPWM的工程优化技巧:
- 扇区判断改用查表法
- 作用时间计算采用定点数运算
- 添加死区补偿模块
matlab复制function [g1, g2, g3] = SVPWM(u_alpha, u_beta, Udc)
% 改用快速近似算法
sector = floor(angle(u_alpha + 1i*u_beta)/(pi/3)) + 1;
T1 = sqrt(3)*Ts*imag((u_alpha + 1i*u_beta)*exp(-1i*(sector-1)*pi/3));
T2 = sqrt(3)*Ts*real((u_alpha + 1i*u_beta)*exp(-1i*(sector-1)*pi/3));
...
end
4.2 坐标变换验证方法
快速验证变换正确性的技巧:
- 静态测试:给定固定角度输入,检查输出分量
- 动态测试:注入旋转矢量,观察幅值恒定
- 反变换验证:正反变换后应恢复原始信号
5. 工程实践要点
5.1 仿真与实机差异处理
关键差异项及补偿方法:
| 差异因素 | 仿真模型 | 实际系统 | 补偿措施 |
|---|---|---|---|
| IGBT导通压降 | 0V | 1.5-3V | 增加电压前馈 |
| 死区时间 | 理想开关 | 2-5μs | 添加死区补偿 |
| 散热条件 | 恒温模型 | 动态变化 | 降额使用 |
5.2 现场调试锦囊
-
上电前必查清单:
- 制动电阻接线极性
- 编码器信号屏蔽
- 接地电阻值
-
异常现象速查:
- 高频啸叫 → 检查PWM载波频率
- 转速波动 → 验证速度反馈信号
- 过流保护 → 排查相序是否正确
-
参数备份技巧:
matlab复制save('config_backup.mat','Kp','Ki','Kd','-v7.3');
6. 进阶优化方向
6.1 参数辨识技术
离线辨识步骤:
- 空载测试:获取定子电阻、电感
- 堵转测试:测量转子参数
- 自由停机:辨识转动惯量
matlab复制Rs = Vdc/(3*I0); % 空载电流法测电阻
Ls = (Vline/(sqrt(3)*2*pi*f*I0)); % 空载电感计算
6.2 无速度传感器控制
模型参考自适应(MRAS)实现要点:
- 可调模型设计
- 自适应律选择
- 稳定性证明
实测数据:在>5%额定转速时,MRAS精度可达±2rpm
7. 完整工程文件说明
提供的仿真包包含:
-
主模型文件:
- VVVF_Main.slx(顶层模型)
- Ctrl_Module.mdl(控制子系统)
-
子模块库:
- SVPWM_Gen.slx
- Park_Transform.slx
- Flux_Observer.slx
-
辅助工具:
- param_init.m(参数初始化脚本)
- waveform_analysis.m(波形分析工具)
使用前注意事项:
- 需安装MATLAB R2018b以上版本
- 首次运行前执行param_init.m
- 修改模型前备份原文件
最后分享一个调试心得:当系统表现异常时,先把所有高级算法模块旁路,从最基本的V/f控制开始逐步验证。这方法帮我解决了至少70%的疑难问题。