
1. 大疆M3508电机基础控制实战指南
作为一名长期从事嵌入式开发的工程师,我深知大疆M3508电机在机器人控制中的重要性。今天我将分享如何通过串级PID控制这款电机的基础转动功能,重点解决实际开发中遇到的典型问题。
1.1 硬件准备与基础认知
在开始前,我们需要准备以下硬件组件:
- 大疆C型开发板(主控制器)
- M3508电机(带编码器反馈)
- C620电调(电机驱动器)
- 24V电源(推荐使用47或48型号电池)
- 分电板(用于电源分配)
重要提示:M3508电机的电调ID必须设置在1-4范围内,这是大疆电机通信协议的规定。错误的ID设置会导致通信失败。
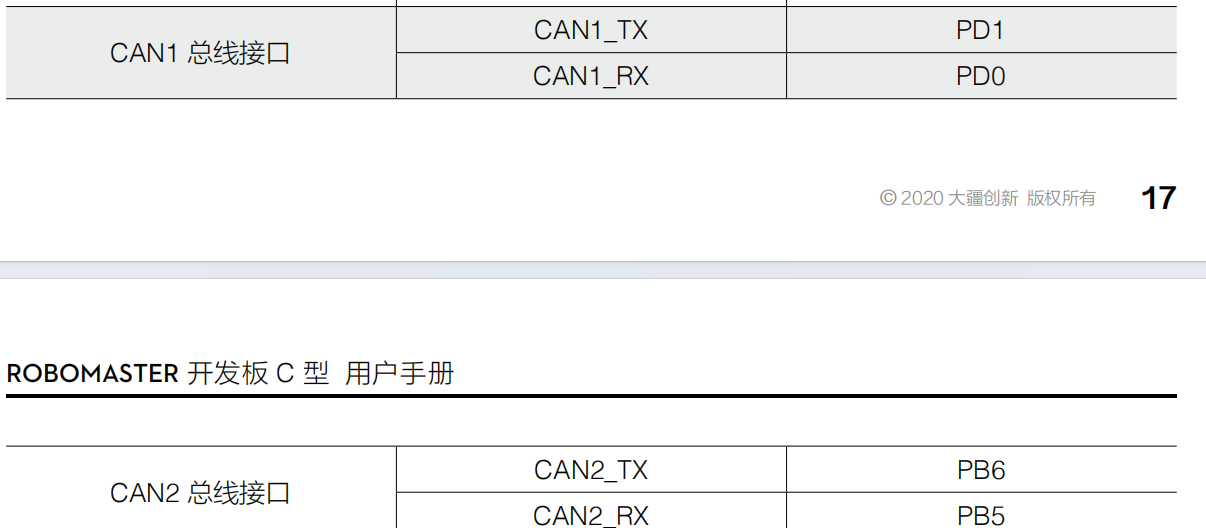
1.2 CAN通信配置要点
CAN总线是电机控制的核心,配置不当会导致电机无法运转。以下是CubeMX配置的关键步骤:
-
CAN参数设置:
- 波特率必须设为1Mbps
- CAN1引脚需要手动修改为实际硬件连接对应的引脚
- 时钟配置需要特别注意,自动配置有时会出错
-
时钟树配置:
- 先开启外部高速晶振(HSE)
- 系统时钟建议配置为168MHz
- 分频系数需要精确计算,错误的配置会导致CAN通信异常
- 中断配置:
- 如果只需要控制电机转动而不需要反馈值,可以不开启接收中断
- 需要反馈数据时,必须正确配置接收中断
1.3 工程创建与文件移植
从大疆提供的源代码包中,我们需要提取以下关键文件:
bsp_can.h/c(CAN总线底层驱动)CAN_receive.h/c(CAN通信协议处理)
移植步骤:
- 将.c文件放入工程Src目录
- 将.h文件放入Inc目录
- 在工程中添加这些文件
- 处理可能出现的编译错误(主要是头文件引用和中断回调函数)
2. 代码实现与调试
2.1 CAN初始化与滤波设置
c复制void can_filter_init(void)
{
CAN_FilterTypeDef can_filter_st;
can_filter_st.FilterActivation = ENABLE;
can_filter_st.FilterMode = CAN_FILTERMODE_IDMASK;
can_filter_st.FilterScale = CAN_FILTERSCALE_32BIT;
can_filter_st.FilterIdHigh = 0x0000;
can_filter_st.FilterIdLow = 0x0000;
can_filter_st.FilterMaskIdHigh = 0x0000;
can_filter_st.FilterMaskIdLow = 0x0000;
can_filter_st.FilterBank = 0;
can_filter_st.FilterFIFOAssignment = CAN_RX_FIFO0;
HAL_CAN_ConfigFilter(&hcan1, &can_filter_st);
HAL_CAN_Start(&hcan1);
HAL_CAN_ActivateNotification(&hcan1, CAN_IT_RX_FIFO0_MSG_PENDING);
can_filter_st.SlaveStartFilterBank = 14;
can_filter_st.FilterBank = 14;
HAL_CAN_ConfigFilter(&hcan2, &can_filter_st);
HAL_CAN_Start(&hcan2);
HAL_CAN_ActivateNotification(&hcan2, CAN_IT_RX_FIFO0_MSG_PENDING);
}
这段代码实现了CAN总线的初始化,配置了接收所有ID的滤波器,并开启了接收中断。对于机器人比赛应用,这种配置足够灵活。
2.2 主控制循环
c复制/* USER CODE BEGIN 2 */
can_filter_init();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
CAN_cmd_chassis(500,500,500,500);
HAL_Delay(10);
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
这个简单的控制循环以10ms的周期发送控制命令,四个参数分别对应四个电机的目标电流值(单位mA)。
2.3 反馈数据处理
如果需要获取电机反馈信息,需要修改CAN_receive.c文件:
c复制// 将static变量改为全局变量
motor_measure_t motor_chassis[7];
CAN_TxHeaderTypeDef gimbal_tx_message;
uint8_t gimbal_can_send_data[8];
CAN_TxHeaderTypeDef chassis_tx_message;
uint8_t chassis_can_send_data[8];
这样修改后,可以在调试时查看电机状态信息,便于PID参数整定。
3. 常见问题与解决方案
3.1 电机不转的排查步骤
-
检查电源:
- 确认24V电源正常供电
- 测量分电板输出电压
-
检查CAN通信:
- 使用CAN分析仪查看是否有数据发送
- 确认CAN总线终端电阻正确连接(通常需要120Ω)
-
检查软件配置:
- 确认CubeMX中CAN参数正确
- 检查时钟配置是否为168MHz
- 验证滤波器设置是否正确
3.2 中断导致系统卡死
如果开启了接收中断但电机不转,可能是中断处理有问题:
- 检查中断优先级设置
- 确认中断回调函数没有死循环
- 确保中断处理时间足够短
3.3 电机转动不平稳
可能原因及解决方案:
- PID参数不合适:需要重新整定参数
- 通信延迟:缩短控制周期或优化代码
- 电源不稳定:检查电池电量或增加电容滤波
4. 进阶调试技巧
4.1 使用SWD调试
通过SWD接口可以:
- 实时查看变量值
- 设置断点分析程序流程
- 测量代码执行时间
4.2 CAN总线分析
推荐使用以下工具分析CAN通信:
- USB-CAN适配器
- Wireshark(配合SocketCAN)
- 大疆官方调试工具
4.3 PID参数整定方法
串级PID整定步骤:
- 先整定内环(电流环)参数
- 再整定外环(速度/位置环)参数
- 从小参数开始,逐步增大
- 观察电机响应,避免超调和振荡
在调试过程中,我发现大疆M3508电机对电流环参数特别敏感。建议初始参数设置为:
- P: 0.5-2.0
- I: 0.01-0.1
- D: 0(初期可以不使用)
5. 性能优化建议
5.1 代码优化
- 使用DMA传输减少CPU负载
- 优化中断处理函数
- 合理使用缓存减少CAN通信次数
5.2 硬件优化
- 缩短CAN总线长度
- 增加电源滤波电容
- 改善散热设计(特别是电调部分)
5.3 系统架构建议
对于复杂控制系统:
- 采用分层设计(应用层、控制层、驱动层)
- 使用RTOS实现多任务管理
- 设计完善的错误处理机制
通过以上步骤,你应该能够实现M3508电机的基础控制。在实际项目中,我发现最关键的还是CAN总线的稳定性和PID参数的合理性。建议先用简单的控制逻辑验证硬件连接,再逐步增加控制复杂度。