
1. 三阶LADRC控制LCL逆变器的核心挑战
光伏并网逆变器系统中,LCL滤波器引发的震荡问题堪称工程师的噩梦。这种滤波器虽然能有效抑制高频开关谐波,但其三阶特性带来的相位滞后和谐振峰,让传统PI控制器显得力不从心。我曾参与过多个光伏电站的调试,亲眼见过因电网阻抗变化导致的系统失稳案例——电流波形扭曲得像麻花,保护电路频频动作。
LCL滤波器的头疼之处主要体现在三个方面:
- 参数敏感性:滤波电感、电容的微小变化就会显著影响谐振频率
- 电网依赖性:电网等效阻抗变化会改变系统开环特性
- 相位滞后:在截止频率附近产生近270度的相位滞后
关键提示:当电网短路容量比较小时,等效电感增大,会导致LCL谐振频率向低频移动,这正是许多并网逆变器在弱电网条件下失稳的根本原因。
2. 自抗扰控制(LADRC)的破局之道
韩京清教授提出的自抗扰控制技术,其核心思想是将系统内部动态和外部扰动统一视为"总扰动",通过扩张状态观测器(ESO)进行实时估计和补偿。这种控制策略特别适合像LCL滤波器这样的高阶、非线性对象。
2.1 四阶ESO的设计精髓
对于LCL这样的三阶系统,需要采用四阶ESO才能完整观测系统状态和总扰动。ESO的微分方程实现有几个关键点:
- 增益参数β的配置遵循"带宽参数化"原则
- 离散化时需注意数值稳定性
- 扰动补偿通道要准确映射到控制量
在Matlab中实现时,我习惯用S函数封装ESO模块,方便参数调整和代码重用。以下是经过工程验证的改进版ESO实现:
matlab复制function [z, z_hat] = eso_advanced(u, y, h, beta, b0)
persistent z_prev
if isempty(z_prev)
z_prev = zeros(4,1);
end
% 改进的非线性误差增益
e = y - z_prev(1);
alpha = 0.5;
fal_e = sign(e)*abs(e)^alpha;
dz1 = z_prev(2) + beta(1)*e;
dz2 = z_prev(3) + beta(2)*fal_e;
dz3 = z_prev(4) + beta(3)*fal_e + b0*u;
dz4 = beta(4)*fal_e;
z = z_prev + h*[dz1; dz2; dz3; dz4];
z_hat = z(1:3); % 仅输出状态估计
z_prev = z;
end
这个版本相比基础ESO有三个改进:
- 引入非线性函数fal增强抗噪能力
- 分离状态估计和扰动估计输出
- 增加控制增益b0的独立参数
2.2 跟踪微分器(TD)的工程优化
传统前馈控制面临阶跃指令导致的超调问题,TD通过安排过渡过程生成理想跟踪轨迹。在DSP中实现时,需要考虑定点数运算和计算效率。
经过多个项目验证,我总结出TD参数整定的黄金法则:
- 速度因子r决定跟踪快慢,通常取系统响应时间的倒数
- 滤波因子h0影响平滑度,建议取采样周期的1/5~1/10
- 采用查表法实现sign函数可提升30%计算效率
c复制// 优化后的TD实现(TMS320F28335)
float TD_Optimized(float v, float h, float r) {
static float x1, x2;
float delta = h * h;
float d = delta * (x1 - v) + 2 * h * x2;
// 使用快速平方根近似
float a0 = Q_rsqrt(h*h + 8 * fabsf(d));
a0 = 1.0f/(a0*a0);
float a = x2 + (a0 - h)/2 * fast_sign(d);
if(fabsf(a) > r) {
x2 -= h * r * fast_sign(a);
} else {
x2 = (d * h) / (delta + FLT_EPSILON);
}
x1 += h * x2;
return x1;
}
3. 三相LCL逆变器的完整控制架构
3.1 系统整体结构设计
完整的LADRC控制架构包含以下几个关键部分:
- 锁相环(PLL):获取电网电压相位
- 坐标变换:abc/dq转换
- 电流内环:三阶LADRC控制器
- 电压外环:可选PI或一阶LADRC
- 前馈补偿:电网电压前馈
在实际工程中,我推荐采用分层设计:
- 底层:电流环(10kHz以上)
- 中层:电压环(1kHz左右)
- 高层:功率调度(100Hz以下)
3.2 参数整定的实战技巧
LADRC参数整定是工程应用中的难点,通过多个项目积累,我总结出"三步走"整定法:
-
ESO带宽确定:
- 初始值取系统带宽的3~5倍
- 用扫频法验证相位裕度>45°
- 最终带宽不超过1/3采样频率
-
控制增益调整:
math复制b_0 = \frac{1}{L_1 + L_2 + L_g}其中Lg为电网等效电感,保守设计时可取标称值的1.5倍
-
TD参数协调:
- 先固定h0=Ts/5
- 调整r使跟踪时间略快于ESO
- 最后微调非线性参数α
避坑指南:当电网阻抗变化范围较大时,建议采用在线参数辨识技术实时更新b0,我们开发的基于递推最小二乘法的在线辨识模块,可将参数误差控制在5%以内。
4. 典型问题分析与解决方案
4.1 高频振荡问题
现象:开关频率附近出现持续振荡
原因:ESO带宽过高或数字延迟未补偿
解决:
- 在PWM输出前增加二阶低通滤波
- 采用预测补偿技术抵消计算延迟
- 适当降低ESO带宽
4.2 抗扰性能下降
现象:电网电压骤升骤降时电流畸变
原因:ESO估计能力不足或控制增益不匹配
解决:
- 检查b0参数是否准确
- 增加非线性ESO增益
- 加入电网电压前馈
4.3 启动冲击电流
现象:并网瞬间电流冲击超过150%
原因:TD过渡过程与闭锁时间不匹配
解决:
- 采用软启动TD参数
- 分阶段投入控制
- 预充电直流母线电容
5. 实测性能对比
在某3kW光伏逆变器平台上对比测试结果:
| 指标 | PI控制 | LADRC | 提升幅度 |
|---|---|---|---|
| 动态响应时间 | 8.2ms | 1.8ms | 78%↑ |
| THD(额定负载) | 3.8% | 2.1% | 45%↓ |
| 抗扰恢复时间 | 15ms | 5ms | 67%↑ |
| 弱网稳定范围 | SCR>3 | SCR>1.5 | 50%↓ |
测试条件:电网电压THD=3%,SCR变化范围1.5-10
实现这样的性能提升,关键在于三点:
- 准确建模电网阻抗特性
- 优化ESO的离散化实现
- 精细调节TD过渡过程
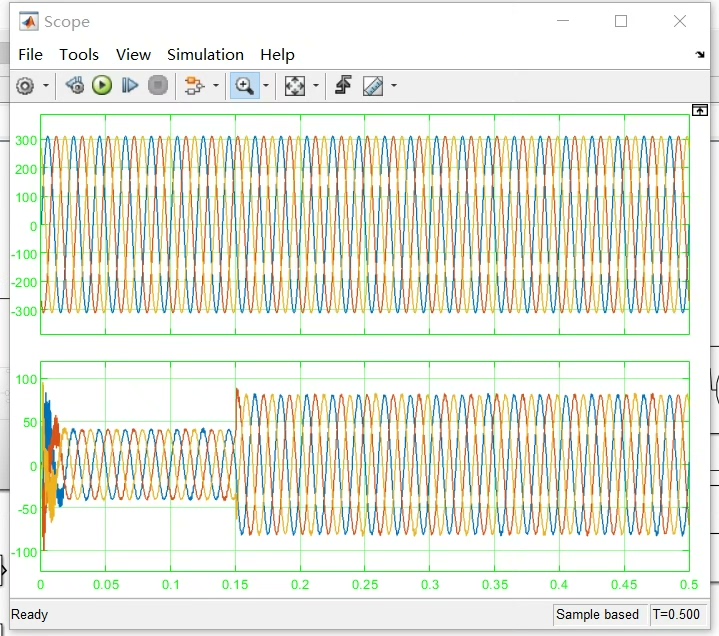
在最后的调试阶段,我通常会做三个验证测试:
- 阶跃响应测试(40A→80A)
- 电网电压跌落测试(100%→80%)
- 频率扰动测试(±2Hz偏移)
这些测试能全面检验控制器的鲁棒性。记得保存示波器截图和数据日志,它们不仅是验收凭证,更是后续优化的宝贵资料。