
1. STM32 GPIO标准库操作概述
作为一名嵌入式开发工程师,掌握STM32的GPIO操作是最基础也是最重要的技能之一。GPIO(General Purpose Input/Output)即通用输入输出接口,是MCU与外部设备交互的桥梁。STM32标准外设库(Standard Peripheral Library)提供了一套完整的API,让我们能够高效地配置和控制GPIO。
在实际项目中,我经常使用STM32F103系列芯片,它的GPIO功能非常强大。每个GPIO端口有16个引脚,每个引脚都可以独立配置为输入或输出模式,支持多种工作状态。通过标准库函数,我们可以避免直接操作寄存器的复杂性,提高代码的可读性和可移植性。
2. GPIO输出模式详解
2.1 硬件电路设计要点
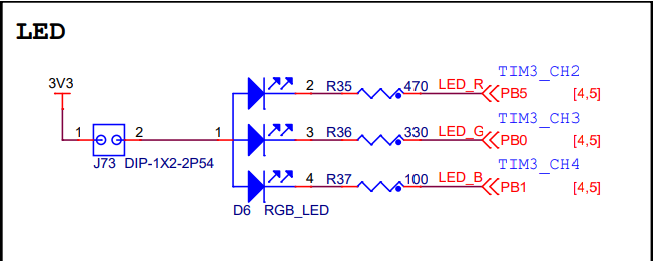
在开始编程前,合理的硬件设计是基础。对于LED控制这类输出应用,我通常会采用以下电路设计:
- LED阳极通过限流电阻连接到GPIO引脚
- LED阴极接地
- 限流电阻值根据LED工作电流计算,通常使用330Ω-1kΩ
这种设计下,GPIO输出高电平时LED点亮,输出低电平时熄灭。电路原理图如下:
提示:实际设计中要考虑GPIO的驱动能力,STM32的GPIO引脚最大输出电流为25mA,但整个端口的电流总和有限制,使用时需查阅具体型号的数据手册。
2.2 头文件设计规范
良好的头文件设计是代码可维护性的关键。在我的项目中,LED.h头文件遵循以下规范:
c复制#ifndef __LED_H
#define __LED_H
#include "stm32f10x.h"
// 引脚定义
#define LED1_GPIO_PORT GPIOB
#define LED1_GPIO_CLK RCC_APB2Periph_GPIOB
#define LED1_GPIO_PIN GPIO_Pin_5
// 寄存器操作宏
#define digitalHi(p,i) {p->BSRR=i;} // 输出高电平
#define digitalLo(p,i) {p->BRR=i;} // 输出低电平
// LED控制宏
#define LED1_ON digitalLo(LED1_GPIO_PORT,LED1_GPIO_PIN)
#define LED1_OFF digitalHi(LED1_GPIO_PORT,LED1_GPIO_PIN)
void LED_GPIO_Config(void);
#endif
这种设计有几个优点:
- 使用防止重复包含的宏保护
- 将硬件相关的定义集中管理,方便移植
- 提供简洁的API接口,隐藏底层实现细节
- 使用宏定义提高代码可读性
2.3 GPIO初始化实现
LED.c文件中的初始化函数是核心部分,下面详细解析:
c复制void LED_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
// 开启GPIO时钟
RCC_APB2PeriphClockCmd(LED1_GPIO_CLK, ENABLE);
// 配置GPIO参数
GPIO_InitStructure.GPIO_Pin = LED1_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 速度50MHz
// 初始化GPIO
GPIO_Init(LED1_GPIO_PORT, &GPIO_InitStructure);
// 默认关闭LED
GPIO_SetBits(LED1_GPIO_PORT, LED1_GPIO_PIN);
}
关键点说明:
- 必须首先使能GPIO时钟,否则无法操作GPIO
- 推挽输出模式(GPIO_Mode_Out_PP)适合驱动LED
- GPIO速度设置会影响边沿速率和功耗,LED应用中使用50MHz即可
- 初始化后应设置默认状态,避免上电时LED状态不确定
2.4 主程序调用示例
在主程序中调用LED控制函数的基本模式:
c复制#include "stm32f10x.h"
#include "LED.h"
void Delay(__IO uint32_t nCount);
int main(void)
{
LED_GPIO_Config();
while(1)
{
LED1_ON;
Delay(0x5FFFFF);
LED1_OFF;
Delay(0x5FFFFF);
}
}
这是一个典型的LED闪烁程序,通过简单的延时实现周期性控制。在实际项目中,我会避免使用这种忙等待的延时方式,而是采用定时器中断来实现更精确的控制。
3. GPIO输入模式详解
3.1 按键电路设计
GPIO输入模式常用于读取按键状态。典型的按键电路设计如下:
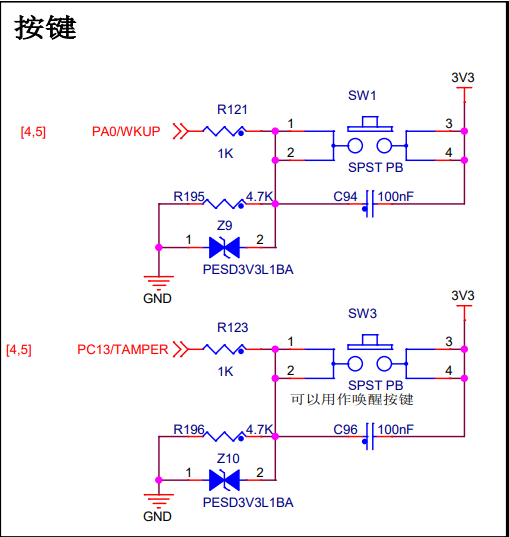
这种设计中:
- 按键一端接地,另一端接GPIO引脚
- GPIO配置为浮空输入模式
- 按键按下时输入低电平,释放时为高电平(由于内部上拉)
3.2 按键驱动实现
KEY.h头文件定义:
c复制#ifndef __KEY_H
#define __KEY_H
#include "stm32f10x.h"
#define KEY1_GPIO_PORT GPIOA
#define KEY1_GPIO_PIN GPIO_Pin_0
#define KEY1_GPIO_CLK RCC_APB2Periph_GPIOA
#define KEY_ON 0 // 按键按下状态
#define KEY_OFF 1 // 按键释放状态
void Key_GPIO_Config(void);
uint8_t Key_Scan(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
#endif
KEY.c中的按键扫描函数实现:
c复制uint8_t Key_Scan(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
{
// 检测按键是否按下
if(GPIO_ReadInputDataBit(GPIOx, GPIO_Pin) == KEY_ON)
{
// 等待按键释放(简单消抖)
while(GPIO_ReadInputDataBit(GPIOx, GPIO_Pin) == KEY_ON);
return KEY_ON;
}
return KEY_OFF;
}
这个实现包含了基本的按键检测和释放判断,但实际项目中还需要考虑:
- 按键消抖(硬件或软件实现)
- 长按和短按识别
- 多按键组合检测
3.3 按键控制LED示例
结合按键和LED功能的完整示例:
c复制#include "stm32f10x.h"
#include "LED.h"
#include "KEY.h"
int main(void)
{
LED_GPIO_Config();
Key_GPIO_Config();
while(1)
{
if(Key_Scan(KEY1_GPIO_PORT, KEY1_GPIO_PIN) == KEY_ON)
{
LED1_TOGGLE; // 按键按下时切换LED状态
}
}
}
这个例子展示了如何使用按键控制LED的开关。在实际应用中,我通常会添加状态机来处理更复杂的按键逻辑。
4. 位带操作技术
4.1 位带原理
STM32的位带(Bit-band)功能允许通过别名地址直接访问单个比特位,这比传统的读-修改-写操作更高效。位带区域包括:
- SRAM位带区:0x20000000-0x200FFFFF
- 外设位带区:0x40000000-0x400FFFFF
每个位带区有对应的位带别名区,通过特定的地址转换公式可以访问单个位。
4.2 位带操作实现
BitBand.h中的关键定义:
c复制// 位带地址转换宏
#define BITBAND(addr, bitnum) ((addr & 0xF0000000)+0x02000000+((addr &0x00FFFFFF)<<5)+(bitnum<<2))
// GPIO位带操作宏
#define PAout(n) BIT_ADDR(GPIOA_ODR_Addr,n)
#define PAin(n) BIT_ADDR(GPIOA_IDR_Addr,n)
// 其他端口类似定义...
使用位带操作LED的示例:
c复制PBout(0) = 0; // PB0输出低电平,点亮LED
PBout(0) = 1; // PB0输出高电平,熄灭LED
位带操作的优势:
- 代码更简洁
- 执行效率更高(单指令完成位操作)
- 避免读-修改-写操作可能导致的竞态条件
5. 标准库GPIO函数详解
STM32标准库提供了一系列GPIO操作函数,下面分类说明:
5.1 初始化函数
c复制void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
用于初始化GPIO引脚,配置工作模式、速度等参数。
5.2 输入操作函数
c复制uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);
用于读取GPIO输入状态,前者读取单个引脚,后者读取整个端口。
5.3 输出操作函数
c复制void GPIO_SetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_ResetBits(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_WriteBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, BitAction BitVal);
用于控制GPIO输出状态,前两个函数分别置位和清零,第三个函数可灵活设置。
5.4 其他实用函数
c复制void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
void GPIO_AFIODeInit(void);
用于引脚锁定和复用功能复位等特殊操作。
6. 实战经验与注意事项
6.1 GPIO配置常见问题
- 时钟未使能:新手最常犯的错误,任何外设使用前必须使能时钟
- 模式选择错误:输入/输出模式选择不当会导致功能异常
- 上拉/下拉电阻:根据电路设计合理配置,避免悬空输入
- 速度设置:高速模式下功耗增加,应根据实际需求选择
6.2 性能优化技巧
- 使用位带操作提高关键路径代码效率
- 批量操作同一端口的多个引脚时,直接读写ODR寄存器
- 合理使用GPIO_SetBits/ResetBits替代GPIO_WriteBit
- 关键时序控制时禁用中断保证操作原子性
6.3 调试技巧
- 使用逻辑分析仪抓取GPIO波形
- 通过寄存器窗口查看GPIO实际配置
- 利用断点和单步调试排查GPIO操作问题
- 编写测试用例验证各种GPIO模式功能
7. 扩展应用
掌握了基础GPIO操作后,可以进一步实现更复杂的功能:
- 矩阵键盘扫描:通过行列式GPIO组合实现多按键检测
- LED点阵控制:利用GPIO高速切换实现动态显示
- 模拟通信协议:用GPIO模拟I2C、SPI等时序
- 外部中断应用:配置GPIO中断响应外部事件
在实际项目中,我经常使用GPIO配合定时器实现PWM调光、脉冲计数等功能。STM32的GPIO灵活性很高,几乎可以满足各种外设接口需求。