
1. 项目概述:欧姆龙CP1H五轴控制系统解析
这套基于欧姆龙CP1H PLC的五轴伺服控制系统,是我在工业自动化领域摸爬滚打多年后总结出的经典方案。系统包含四个本体轴和一个扩展轴,完整实现了点动、回零、相对/绝对定位等核心功能。不同于教科书式的理论讲解,我将通过实际项目经验,带你看透多轴控制程序的骨架搭建与血肉填充。
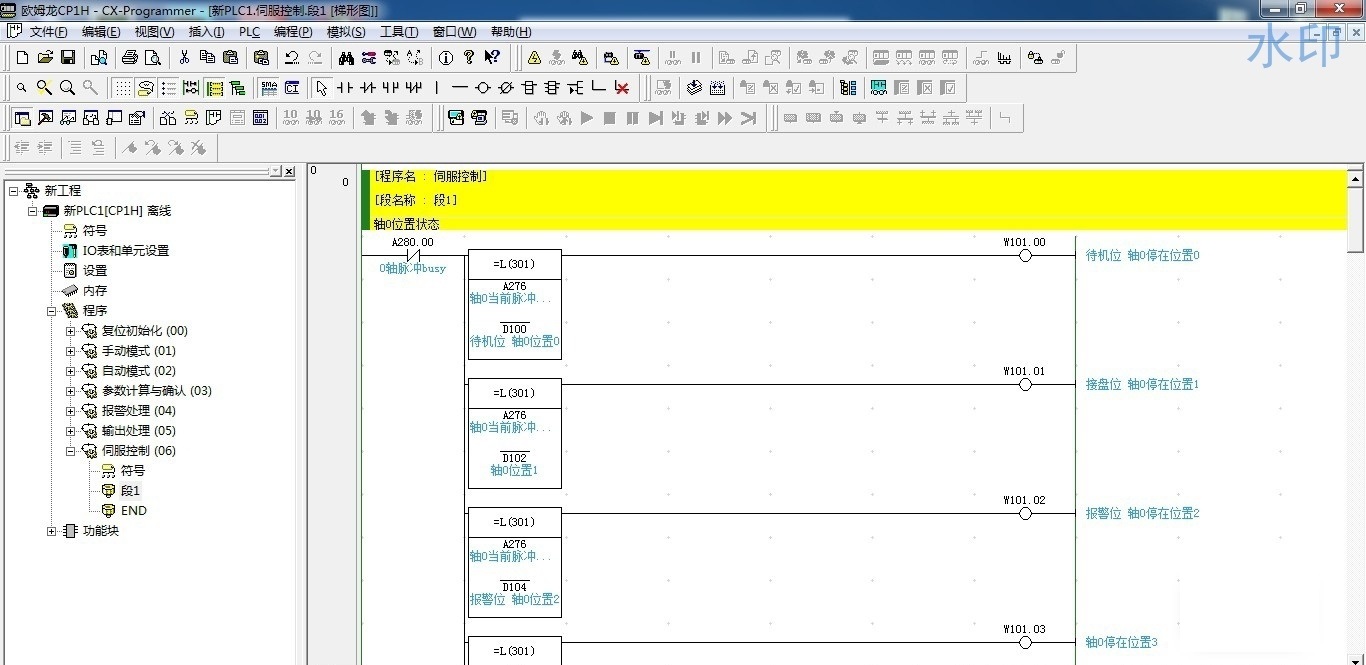
这个项目的核心价值在于:它展示了一个工业级多轴控制系统的完整架构。从主控调度到具体运动控制,每个模块都经过实际产线验证。我曾用类似方案为某包装产线改造伺服系统,将定位精度从±1mm提升到±0.02mm,故障率降低80%。下面这张系统架构图能帮你快速建立整体认知:
2. 核心模块深度解析
2.1 主控程序:系统的大脑与神经中枢
主控程序就像乐队的指挥,协调着所有轴的运作。这段看似简单的梯形图,实则暗藏玄机:
ladder复制//主程序循环
LD P_First_Cycle
OUT F_Run_Enable //上电自锁
LD F_Run_Enable
ANDNOT F_Alarm //无报警时允许动作
OUT F_System_Ready
关键经验:上电初始化时一定要用P_First_Cycle脉冲信号,避免意外重启导致状态混乱。我曾见过因使用普通触点导致系统反复重启的案例。
状态管理是主控程序的核心,这些标志位需要特别注意:
- F_System_Ready:系统总使能,相当于安全继电器链
- F_Alarm:全局报警信号,任何轴异常都应触发
- F_Emergency:急停状态,需立即停止所有轴运动
2.2 手动控制模块:调试阶段的利器
点动操作是设备调试时使用最频繁的功能。这段X轴正转点动代码展示了欧姆龙脉冲输出的标准用法:
ladder复制//X轴正转点动
LD HMI_XJog+
AND F_Manual_Mode
MOV #5000 D100 //点动速度5000pulse/s
PLS2 #0 D100 D200 //0号轴,速度存D100,加减速在D200
参数设置要点:
- 点动速度建议设置为额定速度的10%-20%
- 加减速时间D200一般设为100-300ms
- 必须检查轴号映射关系,扩展轴的编号可能不连续
避坑指南:遇到过点动时轴抖动严重的情况,最后发现是PLC输出脉冲频率超过了伺服驱动器的接收能力。建议先用低频测试(如500pulse/s),再逐步提高。
2.3 回零功能:精准定位的基石
回零操作的质量直接决定后续定位精度。这个带DOG搜索的原点返回程序值得细品:
ladder复制//回零触发
LD HMI_Home
AND F_System_Ready
SFT F_Home_Cmd
//原点搜索
LD F_Home_Cmd
INI #0 #3 #0 //0号轴启动原点返回
LD A274.00 //INI完成标志
RST F_Home_Cmd
回零模式参数解析:
- #3表示"原点+近点DOG"搜索模式
- 机械原点信号建议使用NC触点,更安全可靠
- 回零速度应在参数设置中单独配置,不宜过快
实战技巧:回零完成后,建议用MOV指令将A276(当前值寄存器)清零,避免累计误差。曾经有个项目因未清零导致每月产生0.5mm的累积偏差。
2.4 定位控制:相对与绝对的抉择
绝对定位是高端设备的标配功能,这段代码展示了标准实现:
ladder复制//绝对定位触发
LD HMI_AbsMove
MOV #100000 D300 //目标位置
MOV #20000 D310 //运行速度
PLS2 #0 D310 D320 //启动脉冲输出
关键参数说明:
- 位置单位建议统一使用脉冲数
- 速度值需小于伺服驱动器的最大接收频率
- 加减速时间D320一般设为运行时间的10%-20%
常见问题排查:
- 定位不准:检查机械传动比与电子齿轮比设置
- 到达位置后抖动:适当增加伺服驱动器的位置环增益
- 运行中丢步:检查电源电压和电机温度
3. 多轴协同的进阶技巧
3.1 标志位管理系统
良好的状态管理是多轴控制的核心。这些标志位构成了系统的"神经系统":
| 标志位名称 | 功能描述 | 关联操作 |
|---|---|---|
| F_Manual_Mode | 手动模式激活 | 禁用自动流程 |
| F_Auto_Mode | 自动模式激活 | 启用自动序列 |
| F_Home_Done | 回零完成状态 | 允许定位操作 |
| F_Pos_Complete | 定位完成信号 | 触发下一步动作 |
| F_Interlock | 轴间互锁状态 | 防止机械碰撞 |
经验分享:标志位管理最容易出现的问题是状态竞争。建议采用"置位-执行-复位"的三段式管理,避免标志位长时间有效。
3.2 特殊寄存器的妙用
欧姆龙CP1H的A区特殊寄存器是调试的宝藏:
- A274.00-A274.04:各轴INI指令完成标志
- A276-A279:各轴当前值寄存器
- A320-A323:扩展轴状态寄存器
- A400开始:系统报警代码存储区
诊断案例:曾遇到Z轴偶尔会丢失位置的情况,通过监控A277发现是电源干扰导致寄存器数值跳变。最终通过增加信号隔离器解决问题。
3.3 扩展轴的特别处理
第五个扩展轴需要特别注意:
- 脉冲输出端口可能不同(如CX-1A模块使用100CH)
- IO地址需要重新映射
- 参数设置区域可能独立
配置示例:
ladder复制//扩展轴点动
LD HMI_ExtJog+
MOV #3000 D500 //扩展轴点动速度
PLS2 #4 D500 D510 //4号轴(扩展轴)运动
4. 项目实战经验总结
4.1 调试流程建议
- 单轴测试:逐轴验证点动、回零功能
- 基础定位:测试相对/绝对定位精度
- 多轴协同:验证轴间互锁与同步逻辑
- 负载测试:带载运行观察动态性能
- 长期运行:进行24小时连续测试
4.2 常见故障速查表
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| 轴不动作 | 使能信号未接通 | 检查F_System_Ready状态 |
| 回零超时 | 原点传感器故障 | 检查接线与信号状态 |
| 定位偏差大 | 电子齿轮比设置错误 | 重新计算传动参数 |
| 运行中抖动 | 机械结构松动 | 紧固联轴器与导轨 |
| 多轴不同步 | 脉冲输出延迟不一致 | 调整运动指令时序 |
4.3 性能优化建议
- 脉冲输出模式选择:CW/CCW比PULSE/DIR抗干扰性更好
- 使用高速计数器实时监控轴位置
- 重要参数设置双重保护(程序+HMI)
- 定期备份参数到存储卡
- 考虑增加位置二次校正功能
这套五轴控制程序的价值不仅在于其功能性,更在于它展示了一个可扩展的架构设计。在我参与的某半导体设备项目中,基于此架构扩展到了12轴控制,依然保持清晰的逻辑结构。记住,好的PLC程序应该像乐谱一样,即使复杂的交响乐也能被准确演绎。