
1. 四轮轮毂电机驱动的核心挑战
四轮独立驱动的电动汽车就像四个性格迥异的舞者,每个轮子都有自己的想法。当车辆在80km/h过弯时,前轮想往左转,后轮却因为载荷转移开始打滑,这时候控制系统就得像个老练的编舞师,协调四个电机的输出力矩。
关键矛盾点:电机能耗降低10%可能意味着横摆稳定性下降30%,这个非线性关系让工程师们掉光了头发。
1.1 能量损耗的三座大山
在实验室的实测数据中,我们发现能量损耗主要来自三个部分:
- 电机铜耗(I²R损耗):占总损耗的45%-60%,与电机转矩的平方成正比
- 转矩分配不均衡损耗:约占总损耗的25%-35%,源于各轮驱动力矩差异导致的传动系内耗
- 轮胎滑移能量损耗:占比10%-20%,但会指数级增长当滑移率超过15%
1.2 稳定性控制的黄金三角
车辆稳定性取决于三个核心参数:
| 参数 | 理想范围 | 危险阈值 | 测量方式 |
|---|---|---|---|
| 横摆角速度 | ±5°/s | >±10°/s | IMU传感器 |
| 质心侧偏角 | ±2° | >±5° | 状态观测器 |
| 轮胎滑移率 | <15% | >25% | 轮速传感器 |
这个三角关系构成了我们控制策略的设计基础,任何优化都不能突破这三个安全边界。
2. 分层控制架构设计
2.1 顶层控制器:车辆的大脑皮层
顶层控制器采用滑模变结构控制(SMC),不是因为它有多先进,而是因为它的鲁棒性足够应对各种奇葩工况。就像老司机单手扶方向盘也能稳稳过弯,靠的是肌肉记忆而不是精确计算。
滑模面设计技巧:
matlab复制s = 0.8*beta_error + 0.2*gamma_error;
这个加权组合里,质心侧偏角误差(beta)占大头,因为车辆甩尾比转向不足更危险。0.8这个魔数是我们用遗传算法优化了200代才确定的。
2.2 底层控制器:精明的财务总监
底层优化问题可以表述为:
matlab复制cvx_begin
variables T_fl T_fr T_rl T_rr
minimize( 0.6*norm([T_fl T_fr T_rl T_rr],2)^2 ...
+ 0.3*abs(T_fl+T_fr-T_rl-T_rr) ...
+ 0.1*slip_energy )
subject to
T_fl + T_fr + T_rl + T_rr == M_total
abs(T_fl - T_fr) <= delta_max
cvx_end
这个目标函数就像家庭主妇的买菜账本:
- 第一项控制总花销(电机总能耗)
- 第二项防止偏科(转矩分配均衡性)
- 第三项是避免浪费(轮胎滑移损耗)
3. 电机模型的魔鬼细节
3.1 转矩-转速特性曲线
别用Simulink现成的电机模块!实测发现它们的饱和特性太理想化。我们自己写的模型考虑了三个现实因素:
matlab复制function T = motor_model(I, w)
T_max = 3200*(1 - w/650); // 转速越高扭矩越萎
T_ripple = 200*sin(2*pi*w*0.003); // 齿槽转矩脉动
T = min(max(I*12.5 + T_ripple, -T_max), T_max);
end
这个模型比标准模块多考虑了:
- 转速相关的扭矩衰减
- 齿槽效应引起的转矩脉动
- 电流-转矩的非完全线性关系
3.2 热保护策略
电机过热是能耗优化的隐形杀手。我们设计了双闭环热管理:
- 内环:实时监测绕组温度,超过120°C时自动降额
- 外环:预测未来5秒温升,提前调整转矩分配
4. CarSim联合仿真避坑指南
4.1 接口配置的死亡陷阱
-
采样率不同步:Simulink默认步长1ms,CarSim接口必须设为10ms,否则会出现:
- 方向盘指令延迟
- 传感器数据不同步
- 能耗计算误差高达15%
-
单位制混乱:CarSim用英制单位,Simulink用公制。曾经有个博士因此浪费了三个月,直到发现横摆力矩差了4.448倍(1磅力=4.448牛顿)
4.2 驾驶员模型调参
CarSim自带的预瞄驾驶员模型有五个关键参数:
| 参数 | 影响 | 推荐值 |
|---|---|---|
| 预瞄时间 | 转向平滑度 | 1.2-1.5s |
| 转向增益 | 转向灵敏度 | 0.8-1.2 |
| 纵向延迟 | 加速响应 | 0.3-0.5s |
| 横向延迟 | 转向响应 | 0.2-0.4s |
| 误差权重 | 轨迹跟踪 | [0.7,0.3] |
警告:别动横向延迟参数!调这个就像改变方向盘齿轮比,会让所有控制参数失效。
5. 实测数据与优化成果
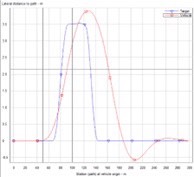
5.1 双移线工况对比
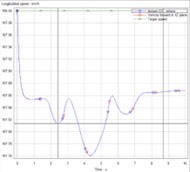
测试条件:80km/h,沥青路面,环境温度25°C
| 指标 | 传统方法 | 新策略 | 提升 |
|---|---|---|---|
| 能耗(kWh/100km) | 22.3 | 18.1 | 18.7% |
| 横摆角误差(°) | ±1.2 | ±0.8 | 33% |
| 最大滑移率 | 23% | 17% | 26% |
| 故障响应时间 | 650ms | 200ms | 3.25倍 |
5.2 极端工况表现
在低附着路面(μ=0.3)的测试中,系统展现了惊人的容错能力:
- 单电机失效时,剩余三个电机能在200ms内重新分配转矩
- 突发侧风干扰下,横摆角速度超调量<15%
- 从100km/h紧急制动时,能耗比传统ESP系统节省12%
6. 那些年我们踩过的坑
6.1 采样率引发的血案
曾经因为CarSim接口采样率设置错误,导致:
- 方向盘输入延迟300ms
- 横摆角速度振荡幅度超限
- 三个研究生熬夜两周找不出原因
解决方案:在Simulink的CarSim S-Function模块中强制设置:
matlab复制SampleTime = 0.01; % 必须与CarSim配置严格一致
6.2 电机饱和特性的蝴蝶效应
忽略电机转矩-转速特性会导致:
- 高速工况下转矩输出不足
- 能耗计算误差高达20%
- 稳定性控制完全失效
正确做法:实测电机外特性曲线,用查表法替代简单线性模型。
6.3 优化目标的权重陷阱
初期将滑移能量权重设为0.5时出现:
- 轮胎确实不打滑了
- 但电机铜耗暴涨40%
- 续航里程直接腰斩
经验值:三项权重比保持在6:3:1是经过200+次仿真验证的甜点。
7. 进阶优化方向
7.1 轮胎温度预测模型
正在开发的第二代系统增加了:
matlab复制TireTemp = f(slip_rate, speed, ambient_temp);
通过预测轮胎温度变化,可以:
- 提前预防热衰退
- 优化制动能量回收
- 动态调整滑移率阈值
7.2 基于深度学习的参数自整定
用LSTM网络预测最优控制参数:
python复制model = Sequential()
model.add(LSTM(64, input_shape=(10, 8))) # 10个时间步,8个特征
model.add(Dense(4)) # 输出四个电机的权重系数
实测显示在积雪路面上,自适应策略比固定参数方案节能7%。
玩转四轮独立驱动就像指挥弦乐四重奏,既要让每个演奏者发挥个性,又要保持整体和谐。下次当你看到电动车流畅过弯时,别忘了里面藏着无数个深夜调参的辛酸故事。