
1. 项目概述:四位数码管动态扫描原理与实现
作为一名嵌入式开发者,我经常遇到初学者在驱动多位数码管时遇到的困惑。明明只有一组段选线,却要让四位显示不同数字,这看似不可能的任务其实隐藏着嵌入式开发中一个经典的技术——动态扫描显示。今天我们就用STM32 HAL库结合Proteus仿真,彻底搞懂这个技术的实现细节。
动态扫描的本质是利用人眼的视觉暂留效应(Persistence of Vision)。当刷新频率超过24Hz时,人眼就会将快速切换的画面视为连续图像。在数码管应用中,我们以足够快的速度轮流点亮每一位数码管,虽然同一时刻只有一位被点亮,但只要扫描频率够高(通常50Hz以上),人眼就会看到四位数字同时显示的效果。
2. 硬件设计与电路搭建
2.1 数码管选型与工作原理
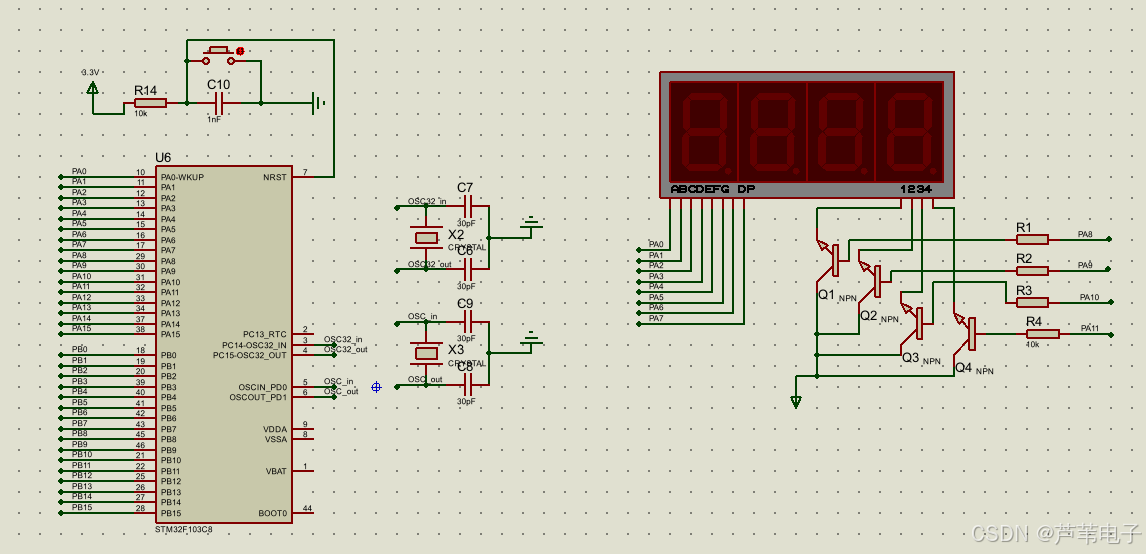
在Proteus中我们使用的是7SEG-MPX4-CA型号,这是一个共阳极四位数码管。理解共阳/共阴的区别对正确驱动至关重要:
- 共阳极:所有LED的阳极连接在一起,位选引脚给高电平时该位被选中,段选引脚给低电平时对应段点亮
- 共阴极:所有LED的阴极连接在一起,位选引脚给低电平时该位被选中,段选引脚给高电平时对应段点亮
注意:Proteus中的数码管模型与实际物理器件可能存在差异,仿真时建议使用示波器功能观察实际电平变化。
2.2 电路连接方案
在Proteus中搭建电路时,我们需要特别注意以下几点:
- 段选线连接:将数码管的a~dp段分别连接到STM32的PA0-PA7
- 位选线连接:将数码管的位选端DIG1-DIG4连接到PA8-PA11
- 上拉电阻:虽然CubeMX配置中我们禁用了内部上下拉,但在实际硬件中建议为位选线添加1kΩ上拉电阻
- 限流电阻:每个段选线上应串联220Ω电阻保护LED
3. STM32CubeMX配置详解
3.1 GPIO配置要点
在CubeMX中配置GPIO时,有几个关键参数需要特别注意:
- 输出模式:选择推挽输出(Output Push Pull)
- 输出速度:必须设置为High,保证足够的扫描速度
- 初始电平:
- 段选线初始设为高电平(共阳数码管默认熄灭)
- 位选线初始设为低电平(默认不选中任何位)
3.2 时钟配置建议
将HCLK配置为72MHz是F103系列的最佳工作频率。更高的主频意味着:
- 更精确的延时控制
- 更高的扫描频率裕量
- 更稳定的显示效果
4. 核心代码实现与优化
4.1 段码表定义技巧
c复制// 共阳极数码管段码表 (0-9)
const uint8_t SegCode[10] = {
0xC0, // 0
0xF9, // 1
0xA4, // 2
0xB0, // 3
0x99, // 4
0x92, // 5
0x82, // 6
0xF8, // 7
0x80, // 8
0x90 // 9
};
段码表的数值来源于数码管内部LED的连接方式。每个位对应一个段:
- 位0: a段
- 位1: b段
- ...
- 位7: dp段
4.2 动态扫描函数实现
c复制void Display_Refresh(uint16_t num)
{
uint8_t i;
uint8_t DisplayData[4];
// 数字分解
DisplayData[0] = num / 1000; // 千位
DisplayData[1] = (num % 1000) / 100; // 百位
DisplayData[2] = (num % 100) / 10; // 十位
DisplayData[3] = num % 10; // 个位
for(i = 0; i < 4; i++)
{
// 1. 消隐:关闭所有位选
HAL_GPIO_WritePin(GPIOA, DIG_1_Pin|DIG_2_Pin|DIG_3_Pin|DIG_4_Pin, GPIO_PIN_RESET);
// 2. 发送段码(使用ODR寄存器提高效率)
GPIOA->ODR = (GPIOA->ODR & 0xFF00) | SegCode[DisplayData[i]];
// 3. 打开当前位选
switch(i)
{
case 0: HAL_GPIO_WritePin(GPIOA, DIG_1_Pin, GPIO_PIN_SET); break;
case 1: HAL_GPIO_WritePin(GPIOA, DIG_2_Pin, GPIO_PIN_SET); break;
case 2: HAL_GPIO_WritePin(GPIOA, DIG_3_Pin, GPIO_PIN_SET); break;
case 3: HAL_GPIO_WritePin(GPIOA, DIG_4_Pin, GPIO_PIN_SET); break;
default: break;
}
// 4. 视觉暂留延时
HAL_Delay(1);
}
}
4.3 主循环逻辑优化
c复制uint16_t count = 0;
uint16_t timer = 0;
while (1)
{
// 每100次扫描计数加1
if(++timer >= 100)
{
timer = 0;
if(++count > 9999) count = 0;
}
// 显示刷新
Display_Refresh(count);
// 其他任务可以放在这里
// 但总执行时间不能超过1ms
}
5. 关键技术与问题排查
5.1 消隐技术详解
消隐是动态扫描中防止"鬼影"的关键步骤。其原理是:
- 在切换位选前,先关闭所有位选
- 更新段码数据
- 再开启新的位选
这样做的目的是确保段码数据稳定后再显示,避免切换过程中的数据竞争。
5.2 ODR寄存器操作优势
直接操作ODR寄存器相比多次调用HAL_GPIO_WritePin有三大优势:
- 原子性操作:所有段同时变化,避免中间状态
- 执行效率高:一条指令完成8个IO设置
- 代码简洁:不需要写8行GPIO操作
5.3 延时时间选择
HAL_Delay(1)中的1ms延时是经过实践验证的平衡点:
- 每位显示1ms → 4位扫描周期4ms → 刷新率250Hz
- 远高于人眼识别阈值(50Hz)
- 给MCU留出足够时间处理其他任务
6. 常见问题与解决方案
6.1 数码管显示异常排查表
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 完全不亮 | 位选信号错误 | 检查共阳/共阴配置 |
| 部分段不亮 | 段选线接触不良 | 检查连接和电阻 |
| 显示数字错误 | 段码表不匹配 | 核对共阳/共阴段码 |
| 闪烁严重 | 扫描频率过低 | 减小延时或优化代码 |
| 鬼影现象 | 消隐不彻底 | 确保先关位选再换段码 |
6.2 高级优化技巧
-
使用定时器中断代替HAL_Delay:
- 更精确的时序控制
- 释放主循环处理能力
-
亮度调节:
- 通过PWM控制位选信号占空比
- 实现数码管亮度分级调节
-
多任务处理:
- 将显示刷新放在定时器中断中
- 主循环专注于业务逻辑
7. 项目扩展与进阶
掌握了基础的四位数码管驱动后,可以考虑以下扩展方向:
-
菜单系统实现:
- 通过按键切换显示模式
- 实现参数设置功能
-
多组数据显示:
- 使用小数点作为分隔符
- 实现自动轮播显示
-
特效显示:
- 数字滚动效果
- 淡入淡出过渡
-
低功耗优化:
- 动态调整扫描频率
- 空闲时关闭显示
在实际项目中,我发现动态扫描技术不仅适用于数码管,其核心思想——分时复用,还可以应用于:
- 矩阵键盘扫描
- LED点阵屏控制
- 多路ADC采样
这种通过时间换空间的思路,是嵌入式系统设计中解决IO资源有限的经典方法。