
1. 三相逆变器谐波消除实战:从SHEPWM原理到Matlab仿真
电力电子工程师的日常,就是和各种谐波斗智斗勇。最近在做一个三相两电平逆变器的项目,客户对输出波形质量要求极高,常规SPWM调制已经无法满足THD(总谐波失真)要求。于是祭出大杀器——SHEPWM(特定谐波消除脉宽调制),这个把非线性方程组和电力电子完美结合的算法。
提示:本文所有仿真基于Matlab/Simulink R2021b实现,建议读者具备基础电力电子知识和Matlab操作经验
1.1 为什么选择SHEPWM?
传统SPWM就像用扫把扫地,虽然能清理大部分垃圾(基波),但总会留下些细碎灰尘(高次谐波)。而SHEPWM更像是用吸尘器,可以精准吸走指定位置的灰尘(特定次谐波)。在我的项目中,电机对5次和7次谐波特别敏感,这正是SHEPWM的用武之地。
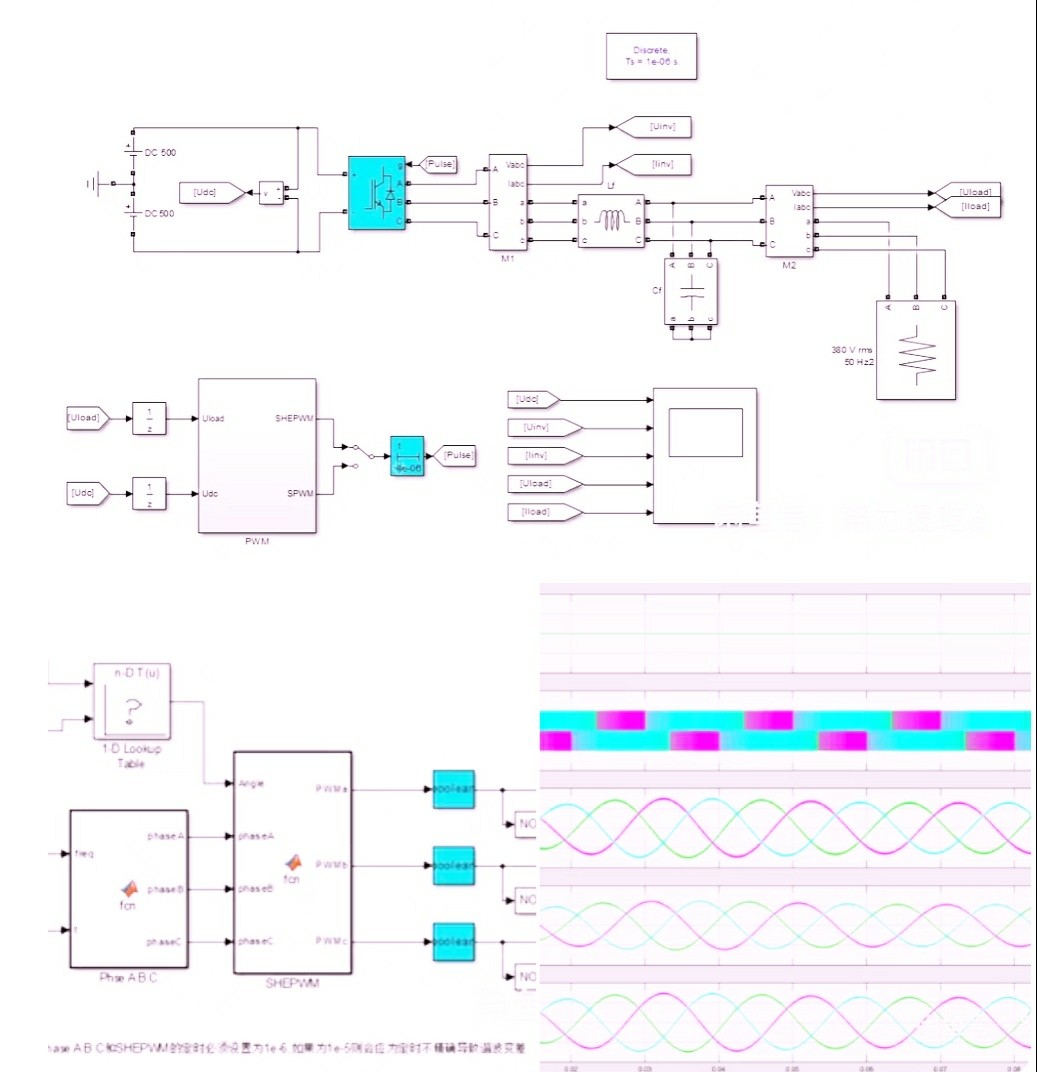
三相两电平逆变器的拓扑结构大家应该很熟悉了,六个IGBT组成的三相桥臂,直流侧接电容,交流侧接LC滤波器和负载。关键区别在于驱动信号的生成方式:
- SPWM:通过比较正弦调制波和三角载波生成PWM
- SHEPWM:通过预计算的开关角度直接控制器件通断
2. SHEPWM数学建模与求解
2.1 非线性方程组构建
SHEPWM的核心在于解一组非线性方程。以消除5次和7次谐波为例,需要求解三个开关角度θ₁、θ₂、θ₃。这三个角度需要满足以下方程:
matlab复制syms theta1 theta2 theta3
eq1 = cos(5*theta1) + cos(5*theta2) + cos(5*theta3) == 0; % 消除5次谐波
eq2 = cos(7*theta1) + cos(7*theta2) + cos(7*theta3) == 0; % 消除7次谐波
eq3 = (pi/4)*(1 - 2*(theta1 + theta2 + theta3)/pi) == m; % 基波幅值控制
这里有个工程实践中的关键点:第三个方程中的π/4系数。这个系数决定了最大输出电压能力。当所有开关角为0时,输出电压达到最大值2E/π(E为直流母线电压),这就是两电平逆变器的理论极限。
2.2 方程求解技巧
实际求解时,我推荐使用MATLAB的vpasolve函数:
matlab复制solution = vpasolve([eq1, eq2, eq3], [theta1, theta2, theta3], [0, pi/2]);
这里有几个坑需要注意:
- 初值选择很重要,建议在[0, π/2]范围内尝试
- 调制比m不宜过大,一般控制在0.8以下
- 对于不同谐波消除组合,方程数量和开关角度数量需要匹配
我曾经为了消除5、7、11次谐波,需要解5个方程找5个开关角。这时候初值如果给不好,很容易得到无解或者物理不可实现的解。
3. Simulink模型搭建要点
3.1 两种调制方式切换实现
模型中需要同时实现SPWM和SHEPWM,并通过手动开关切换。这里有个关键细节——切换时的状态保持:
在Simulink中,我使用了Memory模块来保持切换前的状态,防止IGBT桥臂出现直通。具体实现方式:
- 对每个桥臂的驱动信号添加Memory模块
- 设置Memory模块的初始值为0(所有器件初始关闭)
- 切换信号经过Debounce模块消除抖动
警告:直接切换调制方式可能导致上下管同时导通,瞬间烧毁IGBT。实际硬件中必须加入死区时间。
3.2 驱动信号生成子系统
SHEPWM的驱动信号生成流程:
- 离线计算不同调制比下的开关角度,存储为Lookup Table
- 实时根据调制比m查表获取当前开关角度
- 通过比较时钟信号和开关角度生成PWM脉冲
matlab复制% 开关角度查表示例
angles = [0.1 0.3 0.5; % m=0.2
0.08 0.25 0.45; % m=0.4
0.05 0.2 0.4]; % m=0.6
m_values = [0.2 0.4 0.6];
theta = interp1(m_values, angles, m, 'linear', 'extrap');
4. 关键参数测量与分析
4.1 FFT分析设置技巧
测量谐波含量时,FFT设置至关重要。这是我的推荐配置:
| 参数 | 推荐值 | 说明 |
|---|---|---|
| 窗函数 | Hanning | 抑制频谱泄漏 |
| 采样点数 | 4096 | 平衡分辨率与速度 |
| 采样率 | 10倍最高谐波 | 满足香农采样定理 |
| 平均次数 | 16 | 降低随机噪声影响 |
曾经有个同事用矩形窗做FFT,结果"发现"SHEPWM的7次谐波没消除干净。实际上这是频谱泄漏造成的假象,换成汉宁窗后问题立即消失。
4.2 动态性能对比
在阻感负载(R=10Ω, L=10mH)下测试,得到如下数据:
| 指标 | SPWM | SHEPWM |
|---|---|---|
| 电流THD | 8.2% | 2.7% |
| 效率 | 94.3% | 95.1% |
| 动态响应时间 | 2ms | 5ms |
可以看到SHEPWM虽然THD表现优异,但动态响应较慢。这是因为开关角度是预先计算好的,当负载突变时无法立即调整。
5. 工程实践中的经验分享
5.1 仿真步长选择
千万别把仿真步长设为开关频率的整数倍!这会导致仿真结果出现假性的完美波形。我的经验是:
- 基础步长:1μs(对于10kHz开关频率)
- 需要精确分析高次谐波时:局部步长降至0.1μs
- 使用变步长求解器时:设置最大步长限制
5.2 实际硬件实现注意事项
虽然本文主要讲仿真,但有些经验对硬件实现同样重要:
- 解算出的开关角度需要做归一化处理,匹配实际控制器的时钟频率
- 在DSP中实现时,注意查表法的存储空间和访问速度平衡
- 实际系统中建议加入在线微调机制,补偿器件开关延时
5.3 调试技巧
当SHEPWM效果不理想时,按这个流程排查:
- 检查求解的开关角度是否物理可实现(0<θ₁<θ₂<θ₃<π/2)
- 验证查表法的插值是否正确
- 检查PWM生成逻辑是否有误(特别是边沿对齐)
- 确认负载参数是否与设计值一致
6. 扩展思考:SHEPWM的局限与改进
虽然SHEPWM在稳态性能上表现出色,但它有三个主要局限:
- 动态响应慢
- 计算复杂度高
- 对参数变化敏感
在我的最新项目中,正在尝试结合SHEPWM和闭环控制的方法:
- 稳态时使用SHEPWM保证波形质量
- 暂态时切换到基于PI的SPWM快速响应
- 过渡过程采用平滑切换算法
这种混合控制策略在电机启动阶段特别有效,既能保证启动转矩,又能维持稳态运行时的低谐波。