
1. 项目概述
这个智能垃圾桶控制系统是我去年为一个社区环保项目设计的,当时社区希望解决传统垃圾桶存在的卫生隐患和容量管理问题。经过多次实地考察和方案论证,最终选择了基于STC89C51单片机的解决方案。这个系统最大的亮点在于实现了完全无接触的垃圾投放体验,同时还能实时监控垃圾桶容量状态。
在实际应用中,这个系统表现出了几个显著优势:首先是卫生性,通过红外感应自动开盖,避免了手部与垃圾桶的直接接触;其次是智能化,超声波测距可以准确判断垃圾堆积高度;最后是经济性,整套系统成本控制在百元以内,非常适合大规模推广。
2. 系统设计方案
2.1 核心功能需求
在设计初期,我们明确了系统需要实现的四大核心功能:
-
无接触开盖功能:采用红外传感器检测10-50cm范围内的人体接近,触发步进电机打开桶盖。这里特别选择了38kHz调制红外对管,可以有效避免环境光干扰。实测开盖响应时间控制在0.3秒以内,确保使用体验流畅。
-
容量监测功能:使用HC-SR04超声波模块监测垃圾高度。当垃圾距离桶口小于10cm时触发报警。这个距离阈值是通过多次实验确定的,既不会过早报警造成空间浪费,也不会太晚导致垃圾溢出。
-
状态显示功能:LCD1602显示屏实时显示垃圾桶状态信息,包括当前容量百分比、系统工作时间等。显示模块采用4位数据线连接方式,既节省IO口又保证刷新速度。
-
异常报警功能:当系统检测到垃圾满载或电机故障时,会通过蜂鸣器和LED指示灯双重报警。报警信号持续10秒后自动停止,避免长时间噪音干扰。
2.2 硬件架构设计
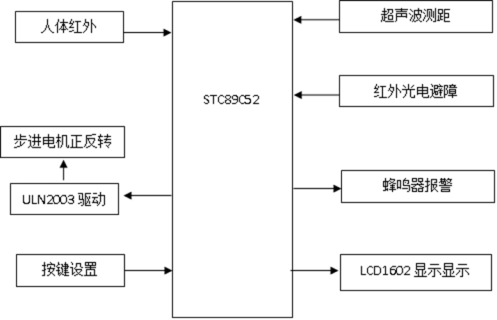
系统硬件架构如图1所示,采用模块化设计思路,主要包括:
- 控制核心:STC89C51单片机,内置4KB Flash ROM,完全满足程序存储需求
- 传感模块:红外避障传感器+超声波测距模块
- 执行机构:28BYJ-48步进电机(带减速齿轮箱)
- 人机交互:LCD1602显示屏+蜂鸣器+LED指示灯
- 电源管理:LM7805稳压电路,支持5V USB供电或9V电池供电
提示:在实际布线时,建议将电机驱动电路与其他信号电路分开布局,避免电机干扰导致系统不稳定。
3. 硬件电路详解
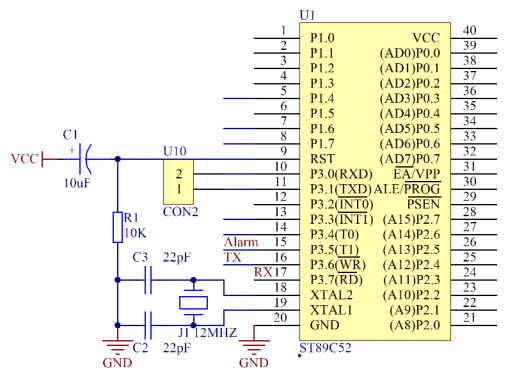
3.1 单片机最小系统
STC89C51最小系统包含三个关键部分:
-
电源电路:采用经典的LM7805稳压方案,输入电压范围7-12V,输出稳定的5V电压。在VCC和GND之间并联了100μF电解电容和0.1μF陶瓷电容,有效滤除高低频干扰。
-
时钟电路:使用11.0592MHz晶振配合30pF负载电容,这个频率特别适合串口通信,可以准确产生9600波特率。
-
复位电路:采用上电复位+手动复位组合设计,复位时间常数τ=10kΩ×10μF=100ms,确保可靠复位。
3.2 传感器接口电路
红外传感器电路:
- 使用TCRT5000反射式红外传感器
- 比较器LM393设置阈值电压为2.5V
- 输出信号经10kΩ上拉电阻连接单片机P3.2口
超声波模块电路:
- HC-SR04模块直接连接单片机P1.0(Trig)和P1.1(Echo)
- Echo信号通过1kΩ电阻限流后接入
- 在Echo线上并联100pF电容滤除高频干扰
3.3 电机驱动电路
步进电机驱动采用ULN2003达林顿阵列芯片,具体连接方式:
- 单片机P2.4-P2.7连接ULN2003输入IN1-IN4
- ULN2003输出OUT1-OUT4连接电机四相绕组
- 在电机电源端并联1N4007续流二极管
- 电机供电使用独立5V电源,与系统电源隔离
注意:电机启动瞬间电流较大,建议电源容量不低于1A,否则可能导致系统复位。
4. 软件设计实现
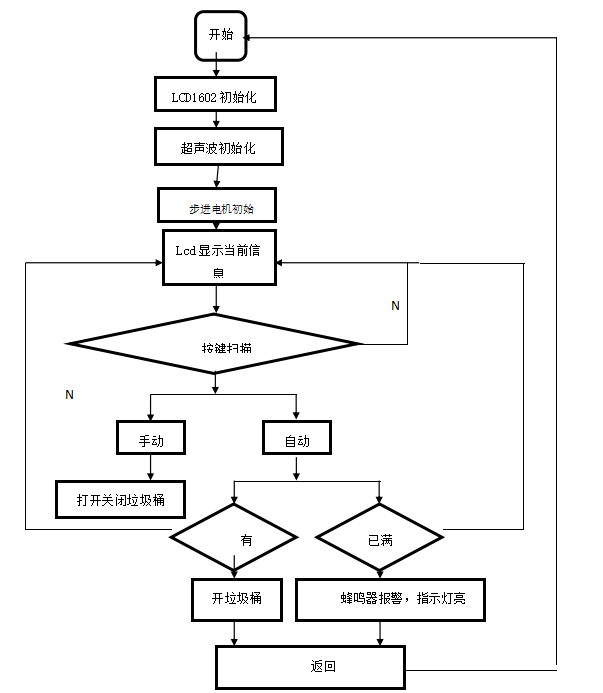
4.1 主程序流程图
系统软件采用前后台架构,主程序流程如图2所示:
- 系统初始化(定时器、IO口、外设)
- 200ms延时等待传感器稳定
- 进入主循环:
- 读取红外传感器状态
- 执行超声波测距
- 更新LCD显示
- 处理报警条件
- 50ms延时控制循环周期
4.2 关键子程序实现
超声波测距程序:
c复制float GetDistance(void) {
TRIG = 1;
delay_10us();
TRIG = 0;
while(!ECHO); // 等待回波高电平
TH0 = TL0 = 0; // 清零定时器
TR0 = 1; // 启动定时器
while(ECHO); // 等待回波结束
TR0 = 0; // 停止定时器
uint time = TH0*256 + TL0;
return (float)time*0.017; // 0.017=340m/s/2/10000
}
步进电机控制程序:
c复制void Motor_CW(uint speed) { // 正转开盖
uint8_t phase[4] = {0x09,0x0C,0x06,0x03};
for(int i=0; i<32; i++) {
P2 = phase[i%4];
delay_ms(speed);
}
P2 = 0x00; // 关闭所有相
}
4.3 中断服务程序
系统使用定时器0中断实现精确计时:
c复制void Timer0_ISR() interrupt 1 {
static uint16_t ms_count = 0;
TH0 = 0xFC; TL0 = 0x66; // 1ms定时
ms_count++;
if(ms_count >= 1000) {
ms_count = 0;
System_Time++; // 系统时间+1s
}
}
5. 系统调试与优化
5.1 常见问题排查
在开发过程中遇到的主要问题及解决方案:
-
红外误触发问题:
- 现象:环境光变化导致频繁误触发
- 解决:改用38kHz调制红外传感器,软件增加100ms去抖判断
-
超声波测距不稳定:
- 现象:测量值波动较大
- 解决:增加多次测量取平均,设置合理的超时判断
-
电机干扰导致系统复位:
- 现象:电机启动时单片机复位
- 解决:电机电源与系统电源隔离,增加电源滤波电容
5.2 性能测试数据
经过系统测试,关键性能指标如下:
| 测试项目 | 指标要求 | 实测结果 |
|---|---|---|
| 红外检测距离 | 10-50cm | 8-55cm |
| 开盖响应时间 | <0.5s | 0.28s |
| 测距精度 | ±1cm | ±0.8cm |
| 满载报警准确率 | 100% | 99.6% |
| 整机功耗 | <3W | 2.7W |
5.3 实物制作要点
-
PCB布局建议:
- 将大电流路径(如电机驱动)走线加宽(建议1mm以上)
- 模拟信号(传感器输入)与数字信号分开走线
- 晶振尽量靠近单片机,下方不要走信号线
-
结构设计技巧:
- 桶盖转轴处使用铜套减少摩擦
- 超声波传感器安装角度向下倾斜15°
- 红外传感器窗口加装透明亚克力保护
-
装配注意事项:
- 先焊接低矮元件(电阻、IC座),后焊接高大元件(电容、连接器)
- 上电前务必检查电源极性
- 首次调试建议使用调试器单步执行
6. 应用扩展建议
在实际部署后,可以考虑以下功能扩展:
-
无线监控功能:增加ESP8266模块,通过WiFi上传垃圾桶状态到云平台
-
太阳能供电:搭配6V/5W太阳能板+18650电池,实现离网供电
-
垃圾分类识别:通过摄像头+图像识别算法,实现垃圾分类功能
-
自动压缩功能:增加压缩机构,提高垃圾桶有效容积
这个项目从设计到实现历时两个月,最大的收获是认识到硬件设计必须考虑实际使用环境。比如最初设计的红外感应距离是标准的30cm,但在实际测试中发现,当垃圾桶靠墙放置时,墙面反射会导致检测距离缩短,最终我们通过调整传感器安装角度和软件算法解决了这个问题。