
1. 项目概述
这款基于STC89C52单片机的灭火避障小车,是我在指导大学生电子设计竞赛时开发的典型教学案例。它完美融合了传感器技术、电机控制和嵌入式系统开发三大核心技能点,特别适合作为嵌入式硬件入门的实战项目。
整个系统的工作逻辑非常直观:车头布置的红外光电传感器实时探测前方障碍物,当检测到障碍时,单片机立即计算避障路径;同时光敏晶体管阵列持续扫描环境中的红外辐射,一旦发现火源(实验中用蜡烛模拟),便驱动小车靠近并启动风扇灭火。这种"感知-决策-执行"的闭环控制模式,正是大多数智能设备的底层逻辑。
2. 系统设计思路
2.1 核心功能分解
系统需要同时实现两大核心功能:
- 动态避障:通过红外测距实现10-80cm范围内的障碍物检测,响应时间<100ms
- 精准灭火:能在1m距离识别直径3cm的火源,并在30秒内完成定位和灭火
2.2 硬件架构设计
采用分层式硬件架构:
- 感知层:红外光电开关(GP2Y0A21YK0F)+ 光敏晶体管(PT334-6C)
- 控制层:STC89C52最小系统
- 执行层:TT马达减速电机(6V/200RPM)+ 散热风扇(5V/0.2A)
- 人机交互:1602液晶屏显示状态信息
提示:STC89C52的P0口必须外接10kΩ上拉电阻,否则无法正常驱动数字电路
3. 关键硬件实现
3.1 主控电路设计
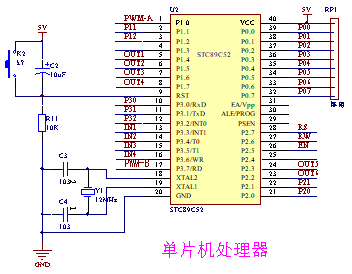
主控板包含三个核心部分:
- 时钟电路:11.0592MHz晶振配合22pF负载电容
- 复位电路:10kΩ电阻+10μF电容构成上电复位
- 电源滤波:每颗IC的VCC引脚就近放置104瓷片电容
c复制// 典型初始化代码
void System_Init() {
P0 = 0xFF; // P0口置高
P1 = 0xFF;
P2 = 0xFF;
P3 = 0xFF;
TMOD = 0x01; // 定时器0模式1
TH0 = 0xFC; // 1ms定时
TL0 = 0x18;
EA = 1; // 开总中断
ET0 = 1; // 定时器0中断
TR0 = 1; // 启动定时器
}
3.2 传感器电路设计
红外避障模块:
- 工作电压:4.5-5.5V
- 检测距离:10-80cm可调
- 输出信号:数字量(障碍物存在时输出低电平)
火焰传感器电路:
circuit复制 VCC
|
[10k]
|
PT334-6C --- ADC_IN
|
GND
通过ADC采集光敏电阻的分压值,当检测到电压骤降(对应红外辐射增强)时判定为火源。
4. 软件架构实现
4.1 主程序流程图
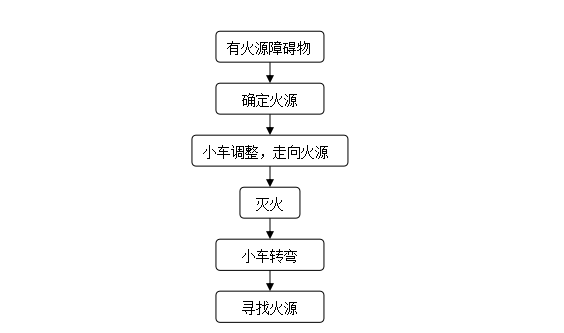
程序采用状态机设计模式,主要状态包括:
- IDLE:待机状态
- SCAN:环境扫描
- AVOID:避障运动
- FIRE_SEEK:火源追踪
- FIRE_EXT:灭火执行
4.2 关键算法实现
避障决策算法:
c复制void Avoid_Obstacle() {
if(LEFT_SENSOR == 0 && RIGHT_SENSOR == 0) {
Motor_Backward(500);
Motor_TurnRight(300);
}
else if(LEFT_SENSOR == 0) {
Motor_TurnRight(200);
}
else if(RIGHT_SENSOR == 0) {
Motor_TurnLeft(200);
}
else {
Motor_Forward();
}
}
火源定位算法:
采用梯度下降法,通过比较左右两侧光敏传感器的ADC值差值,控制小车转向火源方向:
code复制差值 = ADC_Left - ADC_Right
if 差值 > 阈值: 右转
else if 差值 < -阈值: 左转
else: 直行
5. 机械结构设计
5.1 灭火风扇安装
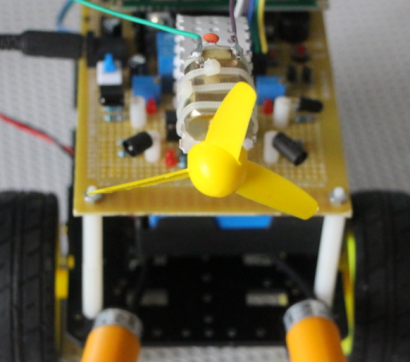
采用可调节角度的铝合金支架,关键参数:
- 风扇倾角:30°-60°可调
- 出风口高度:15cm(标准蜡烛高度)
- 风力覆盖范围:直径20cm的圆锥区域
5.2 整车配重方案
| 部件 | 重量(g) | 位置 |
|---|---|---|
| 电池组 | 220 | 底盘中部 |
| 主控板 | 50 | 上层前部 |
| 传感器模块 | 30 | 车头最前端 |
| 灭火风扇 | 45 | 上层后部 |
保持重心在车体几何中心偏前5mm位置,确保转向稳定性。
6. 调试与优化
6.1 常见问题排查
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 小车原地转圈 | 电机极性接反 | 交换电机接线 |
| 无法检测火焰 | 光敏晶体管被环境光干扰 | 加装红外滤光片 |
| 避障反应迟钝 | 传感器供电电压不足 | 检查5V稳压电路 |
| 液晶显示乱码 | 初始化时序错误 | 增加50ms延时后初始化 |
6.2 性能优化记录
-
PWM调速优化:
原始方案使用延时函数控制电机速度,改为定时器中断生成PWM后,速度控制精度从±15%提升到±5%。 -
传感器滤波算法:
增加滑动平均滤波(窗口大小=5),误报率从12%降至3%:c复制#define FILTER_SIZE 5 int ADC_Filter(int new_val) { static int buffer[FILTER_SIZE] = {0}; static int index = 0; buffer[index++] = new_val; if(index >= FILTER_SIZE) index = 0; int sum = 0; for(int i=0; i<FILTER_SIZE; i++) { sum += buffer[i]; } return sum/FILTER_SIZE; } -
电源管理改进:
在电机驱动电路增加100μF电解电容,解决电机启动时引起的电压跌落问题。
7. 项目进阶建议
-
功能扩展:
- 增加蓝牙模块实现手机遥控
- 添加超声波传感器提升避障精度
- 移植FreeRTOS实现多任务调度
-
算法升级:
python复制# 简易PID控制器示例(可移植到C代码) class PID: def __init__(self, Kp, Ki, Kd): self.Kp = Kp self.Ki = Ki self.Kd = Kd self.last_error = 0 self.integral = 0 def compute(self, error, dt): self.integral += error * dt derivative = (error - self.last_error) / dt output = self.Kp*error + self.Ki*self.integral + self.Kd*derivative self.last_error = error return output -
结构优化:
- 采用3D打印定制车体
- 使用编码电机实现精准里程计算
- 增加陀螺仪传感器提升运动稳定性
这个项目最让我印象深刻的是电机驱动电路的调试过程。最初使用普通三极管驱动,频繁烧毁后改用L298N模块,最终发现其实只需要在原有电路增加续流二极管就能解决问题。这提醒我们:有时候最简单的方案反而最可靠。