
1. 永磁同步电机转动惯量辨识的重要性
永磁同步电机(PMSM)作为现代工业中应用最广泛的电机类型之一,其高性能控制离不开对机械参数的精确掌握。转动惯量J作为描述电机机械特性的核心参数,直接影响着控制系统的动态响应特性。在实际工程中,转动惯量往往难以通过直接测量获得,特别是在负载惯量变化的应用场景下(如机械臂、电动汽车等),在线辨识技术显得尤为重要。
模型参考自适应系统(MRAS)因其结构简单、实现方便且不需要额外的硬件设备,成为工程实践中转动惯量辨识的首选方案。与传统的离线测量方法相比,MRAS能够在电机正常运行过程中实时更新转动惯量估计值,这对于需要适应不同工况的伺服系统至关重要。
注意:转动惯量的准确辨识对于PI调节器参数整定、预测控制算法实现以及抗扰动控制都具有决定性影响。误差超过20%的惯量估计可能导致控制系统性能显著下降。
2. MRAS基本原理与实现架构
2.1 参考模型与可调模型构建
MRAS方法的核心在于建立两个并行运行的模型:参考模型(代表理想系统行为)和可调模型(包含待辨识参数)。对于PMSM系统,我们选择电机运动方程作为建模基础:
\[ J\frac{d\omega_r}{dt} = T_e - T_L - B\omega_r \]
参考模型直接使用上述方程,其中:
- \(T_e\):通过电流环输出的电磁转矩(\(1.5p[\psi_f i_q + (L_d-L_q)i_d i_q]\))
- \(T_L\):已知或可测量的负载转矩
- \(B\):通过离线测试获得的摩擦系数
可调模型采用相同结构,但将转动惯量J替换为待辨识参数\(\hat{J}\):
\[ \hat{J}\frac{d\hat{\omega}_r}{dt} = T_e - T_L - B\hat{\omega}_r \]
2.2 自适应律设计
通过比较两个模型的输出角速度(\(\omega_r\)与\(\hat{\omega}_r\)),定义误差信号:
\[ e = \omega_r - \hat{\omega}_r \]
采用Lyapunov稳定性理论推导的自适应律可保证系统全局稳定,其离散化实现形式为:
matlab复制function J_hat = UpdateJhat(J_hat, e, omega_r, dt)
% 自适应率eta需根据系统动态特性选择
% 典型值范围:0.001~0.1
eta = 0.01;
J_hat = J_hat + eta * e * omega_r * dt;
end
关键参数说明:自适应率η决定收敛速度,过大会导致振荡,过小则收敛缓慢。建议初始值设为0.01,再根据仿真结果调整。
3. Simulink实现细节解析
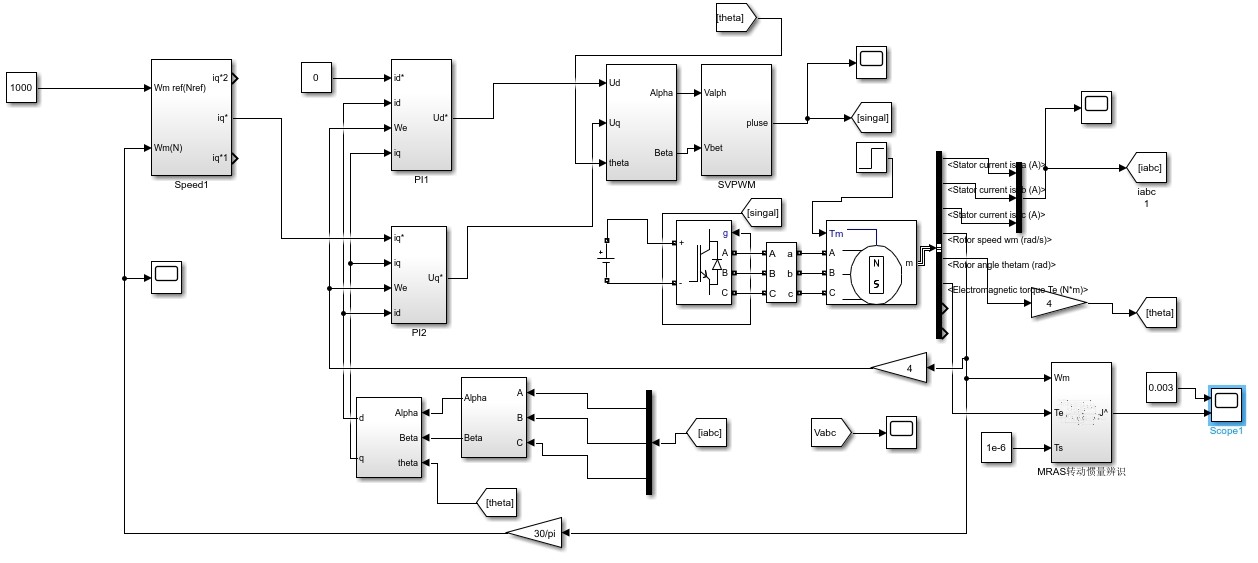
3.1 系统整体架构设计
完整的Simulink模型应包含以下子系统:
- PMSM本体模型(包含电气和机械部分)
- 矢量控制模块(电流环+速度环)
- MRAS辨识模块(参考模型+可调模型+自适应律)
- 信号监测与记录模块
3.2 关键模块实现技巧
参考模型实现:
matlab复制function omega_ref = ReferenceModel(Te, Tl, B, J, dt)
persistent omega;
if isempty(omega)
omega = 0;
end
domega = (Te - Tl - B*omega)/J;
omega = omega + domega*dt;
omega_ref = omega;
end
变增益设计技巧:
matlab复制function gain = AdaptiveGain(e)
% 基础增益
kp_base = 0.05;
% 误差阈值设置
threshold = 0.2;
if abs(e) > threshold
gain = kp_base * (1 + log(abs(e)/threshold));
else
gain = kp_base;
end
end
3.3 参数初始化与仿真设置
| 参数名称 | 符号 | 典型值范围 | 初始化建议 |
|---|---|---|---|
| 转动惯量初值 | J_hat | 0.1~10 kg·m² | 真实值的50% |
| 自适应率 | η | 0.001~0.1 | 0.01 |
| 仿真步长 | dt | 1e-5~1e-4 s | 5e-5 s |
| 摩擦系数 | B | 0.001~0.1 N·m·s | 实测值 |
实操建议:首次仿真时建议采用固定步长ode4(Runge-Kutta)算法,步长设置为5e-5秒以保证数值稳定性。
4. 典型问题与解决方案
4.1 辨识结果不收敛
可能原因及对策:
-
自适应率设置不当
- 现象:估计值持续振荡
- 解决:逐步减小η值,观察收敛性
-
负载转矩测量误差
- 现象:稳态时存在固定偏差
- 解决:增加负载观测器或提高转矩测量精度
-
初始惯量偏离过大
- 现象:收敛速度极慢
- 解决:设置更接近真实值的初始估计
4.2 动态过程估计误差大
优化方案:
- 引入变增益策略:
matlab复制function gain = DynamicGain(e, de)
kp = 0.1;
kd = 0.01;
gain = kp*abs(e) + kd*abs(de);
end
- 增加低通滤波:
- 在自适应律输出端添加二阶Butterworth滤波器
- 截止频率设为电机带宽的2~3倍
4.3 数字实现注意事项
-
离散化影响:
- 自适应律更新频率应≥10倍控制周期
- 采用Tustin变换保持稳定性
-
量化误差处理:
- 使用单精度浮点运算
- 关键变量采用double类型
5. 进阶优化方向
5.1 多参数联合辨识
扩展MRAS框架同时辨识转动惯量和摩擦系数:
matlab复制function [J_hat, B_hat] = UpdateParams(J_hat, B_hat, e, omega_r, dt)
eta_J = 0.01;
eta_B = 0.001;
J_hat = J_hat + eta_J * e * omega_r * dt;
B_hat = B_hat - eta_B * e * omega_r * dt;
end
5.2 抗干扰改进方案
- 引入扰动观测器补偿未建模动态
- 采用鲁棒自适应律:
- σ修正法
- 投影算法
5.3 实验验证建议
-
阶跃响应测试:
- 在不同转速下施加转矩阶跃
- 观察估计值收敛速度
-
带载运行验证:
- 逐步改变负载惯量
- 记录参数跟踪性能
6. 工程应用经验分享
在实际项目中应用该方案时,有几个值得注意的实践经验:
-
冷启动处理:电机初始静止时,由于缺乏足够的动态激励,辨识算法可能无法正常工作。建议:
- 前30秒采用预设的保守控制参数
- 待转速超过额定值10%后启用MRAS
-
参数冻结机制:当检测到系统进入稳态(角速度波动<1%)时,可以暂停自适应更新以避免噪声影响:
matlab复制if abs(domega) < 0.01*omega_rated
freeze_flag = true;
else
freeze_flag = false;
end
- 故障检测应用:转动惯量的异常变化可能暗示机械故障,例如:
- 联轴器松动(惯量减小)
- 传动带断裂(惯量突变)
- 润滑失效(摩擦系数增大)
通过长期监测这些参数变化,可以实现预测性维护。