
1. 3R平面机械臂动力学仿真概述
3R平面机械臂是机器人学中经典的动力学研究对象,由三个旋转关节串联组成,所有运动均发生在同一平面内。这种结构虽然简单,但包含了多体系统动力学的核心特征,是学习机器人动力学建模与控制的理想起点。
前向动力学仿真是指给定关节力矩输入,计算机械臂各关节的运动状态(位置、速度、加速度)的过程。这与逆向动力学(给定运动求力矩)形成对比,是控制器设计、轨迹规划等高级应用的基础。
2. 动力学建模原理
2.1 拉格朗日方程基础
拉格朗日法是建立机器人动力学模型的经典方法,其核心是拉格朗日函数L=T-V,其中T为系统总动能,V为系统总势能。对于3R机械臂,动力学方程的一般形式为:
M(q)q̈ + C(q,q̇)q̇ + G(q) = τ
式中:
- q ∈ ℝ³:关节角度向量
- M(q) ∈ ℝ³ˣ³:对称正定的质量矩阵
- C(q,q̇) ∈ ℝ³ˣ³:科里奥利力和向心力矩阵
- G(q) ∈ ℝ³:重力向量
- τ ∈ ℝ³:关节力矩向量
2.2 质量矩阵计算详解
质量矩阵M(q)反映了关节空间与笛卡尔空间惯性特性的映射关系。对于3R机械臂,其第i行第j列元素的计算公式为:
Mᵢⱼ(q) = ∑[mₖJᵥₖᵀJᵥₖ + JᵥₖᵀIₖJᵥₖ] (k=1→3)
其中:
- mₖ:第k个连杆的质量
- Iₖ:第k个连杆的惯性张量(在平面运动中简化为标量)
- Jᵥₖ:第k个连杆的线速度雅可比矩阵
- Jᵥₖ:第k个连杆的角速度雅可比矩阵
在实际计算中,需要依次求出每个连杆的雅可比矩阵。以第二连杆为例,其质心位置相对于基座标系的位置为:
x₂ = l₁cos(q₁) + r₂cos(q₁+q₂)
y₂ = l₁sin(q₁) + r₂sin(q₁+q₂)
其中l₁为第一连杆长度,r₂为第二连杆质心到其关节的距离。对应的线速度雅可比矩阵通过对x₂,y₂求导得到。
2.3 科里奥利力矩阵推导
科里奥利力矩阵C(q,q̇)包含了由机械臂运动产生的耦合项,其元素可通过质量矩阵的偏导数和克里斯托费尔符号计算:
Cᵢⱼ = ∑[1/2(∂Mᵢⱼ/∂qₖ + ∂Mᵢₖ/∂qⱼ - ∂Mⱼₖ/∂qᵢ)q̇ₖ] (k=1→3)
这个表达式体现了速度相关的非线性耦合效应。在实际编程实现时,通常采用递归算法高效计算。
2.4 重力项计算
重力项G(q)反映了重力对关节力矩的影响,通过势能对关节角的偏导数得到:
Gᵢ = ∂V/∂qᵢ
对于平面机械臂,总势能为各连杆势能之和:
V = ∑[mₖghₖ] (k=1→3)
其中hₖ为第k个连杆质心的垂直高度。例如,第二连杆的势能为:
V₂ = m₂g(l₁sinq₁ + r₂sin(q₁+q₂))
3. MATLAB仿真实现
3.1 仿真程序结构
完整的仿真程序通常包含以下模块:
- 主脚本(main.m):设置参数、调用求解器、绘制结果
- 动力学模型(dynamics.m):实现动力学方程
- 质量矩阵计算(mass_matrix.m)
- 科里奥利力计算(coriolis_matrix.m)
- 重力项计算(gravity_vector.m)
- 可视化函数(plot_results.m)
3.2 核心代码解析
matlab复制function dydt = dynamics(t,y,tau)
% 解析状态变量
q = y(1:3); % 关节角度
dq = y(4:6); % 关节角速度
% 计算各项矩阵
M = mass_matrix(q);
C = coriolis_matrix(q,dq);
G = gravity_vector(q);
% 计算关节加速度
ddq = M \ (tau(t) - C*dq - G);
% 返回状态导数
dydt = [dq; ddq];
end
3.3 参数化建模实现
为提高代码复用性,建议将机械臂参数定义为结构体:
matlab复制robot.l = [0.5, 0.4, 0.3]; % 连杆长度
robot.m = [1.2, 0.8, 0.5]; % 连杆质量
robot.r = [0.25, 0.2, 0.15]; % 质心位置(距近端关节)
robot.I = [0.1, 0.05, 0.02]; % 连杆转动惯量
这样在计算各项矩阵时,可以统一访问这些参数,便于修改和扩展。
3.4 数值积分方法
MATLAB提供了多种ODE求解器,对于刚性问题推荐使用ode15s:
matlab复制options = odeset('RelTol',1e-6,'AbsTol',1e-8);
[t,y] = ode15s(@(t,y)dynamics(t,y,@tau_func), [0 10], y0, options);
其中tau_func是用户定义的力矩函数,例如:
matlab复制function tau = tau_func(t)
tau = [0.1*sin(t);
0.05*cos(1.5*t);
0.02*sin(2*t)];
end
4. 仿真结果分析
4.1 典型运动状态仿真
设置初始条件q₀=[0;0;0], q̇₀=[0;0;0],施加周期性关节力矩,仿真10秒得到各关节运动状态:
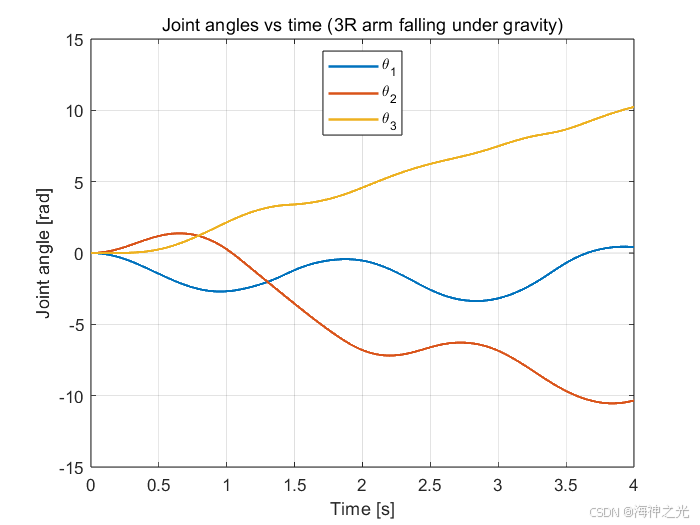
图1:各关节角度变化曲线
图2:各关节角速度变化曲线
4.2 能量守恒验证
在无外力情况下(τ=0),系统总能量应保持恒定。计算动能T和势能V:
matlab复制E_total = zeros(size(t));
for i = 1:length(t)
q = y(i,1:3)';
dq = y(i,4:6)';
M = mass_matrix(q);
T = 0.5*dq'*M*dq;
V = robot.m(1)*9.8*robot.r(1)*sin(q(1)) + ...
robot.m(2)*9.8*(robot.l(1)*sin(q(1)) + robot.r(2)*sin(q(1)+q(2))) + ...
robot.m(3)*9.8*(robot.l(1)*sin(q(1)) + robot.l(2)*sin(q(1)+q(2)) + robot.r(3)*sin(q(1)+q(2)+q(3)));
E_total(i) = T + V;
end
理想情况下E_total应为常数,实际数值仿真中由于积分误差会有微小波动,但相对误差应小于1%。
4.3 奇异位形分析
当机械臂处于奇异位形时,质量矩阵M(q)会变得奇异(行列式接近零),导致数值计算困难。对于3R平面机械臂,常见的奇异位形包括:
- 完全伸展:q₂=0, q₃=0
- 完全折叠:q₂=±π, q₃=±π
在这些位形附近仿真时,需要减小积分步长或采用正则化技术。
5. 工程实践中的注意事项
5.1 数值稳定性处理
- 质量矩阵求逆优化:直接使用MATLAB的\运算符比inv()更稳定高效
- 奇异位形处理:当det(M)小于阈值时,添加阻尼项或采用伪逆
- 积分步长控制:对于快速变化的力矩输入,需设置适当的相对误差容限
5.2 参数不确定性影响
实际机械臂参数与模型可能存在偏差,主要影响源包括:
- 连杆质量分布不准确
- 关节摩擦未建模
- 传动机构柔性
建议进行参数敏感性分析:
matlab复制param_variation = linspace(0.8, 1.2, 5); % ±20%参数变化
for p = param_variation
robot_mod = robot;
robot_mod.m = robot.m * p;
% 重新仿真并比较结果差异
end
5.3 实时性考量
对于需要实时仿真的应用(如硬件在环测试),可采取以下优化:
- 预先计算并存储M(q)、C(q,q̇)、G(q)的符号表达式
- 使用C代码生成(MATLAB Coder)
- 采用固定步长求解器
6. 扩展应用方向
6.1 控制器设计与验证
基于动力学模型可设计各种控制器:
- 计算力矩控制:τ = M(q)(q̈_d+Kₚe+Kᵥė)+C(q,q̇)q̇+G(q)
- PD控制:τ = Kₚ(q_d-q)+Kᵥ(q̇_d-q̇)
- 自适应控制:在线估计参数不确定性
6.2 轨迹规划优化
结合动力学约束的轨迹规划:
- 时间最优轨迹规划
- 能耗最优轨迹规划
- 冲击受限轨迹规划
6.3 刚柔耦合仿真
考虑连杆柔性时,需建立柔性多体动力学模型,常用方法包括:
- 假设模态法
- 有限元法
- 绝对节点坐标法
7. 常见问题排查
7.1 仿真结果异常检查表
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 关节角度发散 | 力矩输入过大 | 检查τ的量级和单位 |
| 能量持续增加 | 数值积分误差积累 | 减小RelTol/AbsTol |
| 奇异位形附近振荡 | 质量矩阵接近奇异 | 添加阻尼项或避开奇异位形 |
| 关节运动不符合预期 | 动力学方程符号错误 | 检查M,C,G的计算 |
7.2 性能优化技巧
- 向量化计算:避免在动力学函数中使用循环
- 预先分配数组:特别是在ODE求解器中
- 使用解析雅可比:为ODE求解器提供雅可比函数
- 并行计算:参数扫描时使用parfor
7.3 模型验证方法
- 静态位形验证:在重力作用下验证G(q)的正确性
- 能量守恒验证:无外力时检查总能量变化
- 简化模型对比:如忽略科里奥利力时的行为
- 商业软件对照:与ADAMS、Simscape等多体软件结果比较
8. 进阶学习资源
-
教材推荐:
- 《Robot Dynamics and Control》 - Spong et al.
- 《Robotics: Modeling, Planning and Control》 - Siciliano et al.
-
MATLAB工具箱:
- Robotics System Toolbox
- Simscape Multibody
-
开源项目:
- OpenRAVE:开源机器人仿真平台
- Drake:MIT开发的机器人建模与控制系统
在实际机器人开发中,准确的动力学模型是实现高性能控制的基础。建议从简单的3R平面机械臂入手,逐步扩展到更复杂的空间机构。仿真时特别要注意数值稳定性问题,对于实时性要求高的应用,可以考虑模型简化或预计算技术。