
1. 楼宇自动化智能控制系统实验平台搭建
作为一名从事工业自动化系统集成多年的工程师,我经常需要为楼宇自动化项目搭建快速验证平台。今天要分享的这套基于Simulink的多通道控制系统,是我在实际项目中反复验证过的成熟方案,特别适合需要同时监测温湿度、空气质量并控制风机阀门的场景。
这个系统的核心价值在于:通过标准化的硬件接口和模块化的软件设计,工程人员可以在1-2天内完成从零搭建到闭环控制的完整流程。相比传统PLC编程方式,Simulink的图形化编程能节省至少50%的开发时间,特别适合算法验证和原型开发阶段。
2. 系统架构设计与硬件选型
2.1 整体系统框图解析
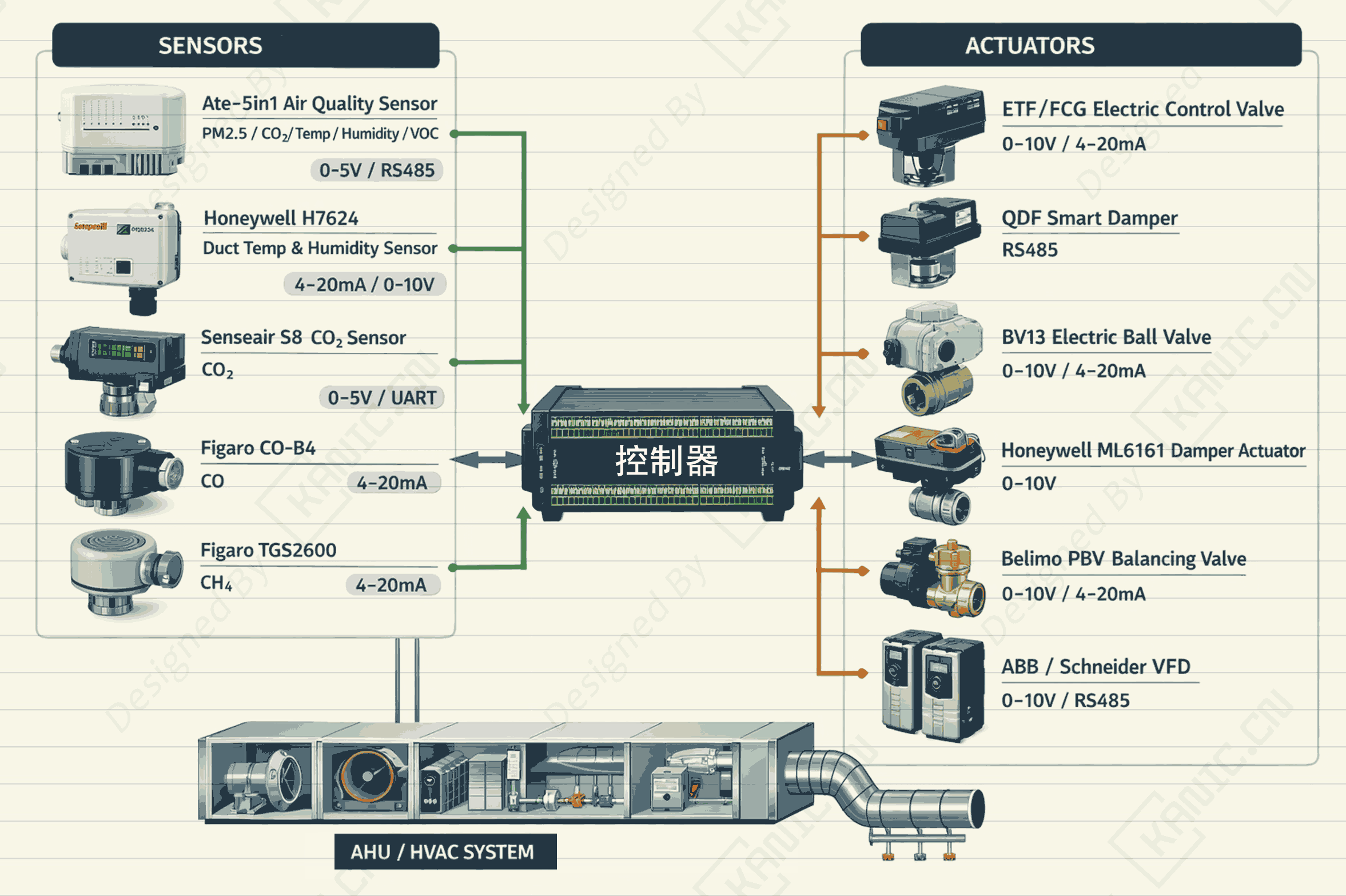
这个框图展示了一个典型的多通道控制架构,包含三个关键层级:
- 感知层:各类环境传感器通过RS485总线接入网关
- 控制层:运行Simulink模型的工控机通过Modbus TCP与网关通信
- 执行层:变频器和电动阀接收4-20mA控制信号
实际部署时建议采用双网段隔离:传感器网络(192.168.1.0/24)和控制网络(192.168.2.0/24)分开,避免数据流冲突。
2.2 传感器选型经验谈
在空气质量监测项目中,传感器选型需要考虑三个关键因素:
- 测量精度:特别是CO₂传感器的±50ppm误差是否可接受
- 响应时间:VOC传感器通常需要90秒稳定时间
- 通讯协议:优先选择Modbus RTU标准协议设备
我们实验室常用的传感器配置方案:
| 参数类型 | 推荐型号 | 采样周期 | 协议支持 |
|---|---|---|---|
| 温湿度 | Honeywell H7624 | 5s | Modbus RTU |
| CO₂ | Senseair S8 | 10s | Modbus RTU |
| VOC | Ate-5in1 | 30s | 自定义协议 |
| 管道温度 | PT100+变送器 | 2s | 4-20mA |
特别注意:不同品牌的VOC传感器算法差异很大,建议固定使用同一型号保证数据可比性。
2.3 执行器控制要点
风机和阀门控制中最容易忽视的是死区补偿问题。以我们使用的Belimo PBV系列平衡阀为例:
- 死区范围:通常为开度的2-5%
- 补偿方法:在Simulink中加入死区补偿模块
matlab复制% 死区补偿算法示例
if (u > 0.05)
u_comp = u + 0.03;
elseif (u < -0.05)
u_comp = u - 0.03;
else
u_comp = 0;
end
对于变频器控制,建议:
- 设置加速/减速时间为15-30秒避免机械冲击
- 最低运行频率不要低于20Hz(对于离心风机)
- 启用自动转矩提升功能
3. Simulink建模核心技巧
3.1 多通道数据采集配置
在Simulink中配置Modbus通信时,关键参数设置:
- 从站地址映射表:
matlab复制slave_address_map = {
'温度传感器1', 1;
'CO2传感器', 2;
'VOC传感器', 3;
'阀门控制器', 4
};
- 采样时序优化:
- 将慢变参数(如CO₂)设为10秒采样周期
- 快变参数(温度)设为1秒周期
- 使用Rate Transition模块处理多速率数据
实测发现:当同时读取超过8个寄存器时,RTU模式容易出现超时错误,建议分批次读取。
3.2 控制算法实现
PID控制器参数整定
对于楼宇控制系统,推荐使用以下初始参数:
- 温度控制:P=2.5, I=0.05, D=0.1
- 风量控制:P=1.8, I=0.03, D=0.05
在Simulink中实现抗饱和PID:
matlab复制function [output, integral] = pid_anti_windup(error, Kp, Ki, Kd, integral_prev, dt)
persistent last_error;
% 比例项
P = Kp * error;
% 积分项带抗饱和
integral = integral_prev + Ki * error * dt;
if integral > 1
integral = 1;
elseif integral < 0
integral = 0;
end
% 微分项
if isempty(last_error)
last_error = error;
end
D = Kd * (error - last_error) / dt;
last_error = error;
output = P + integral + D;
end
模糊控制实现
对于非线性明显的VOC控制系统,可以采用模糊逻辑控制:
- 定义输入变量:VOC浓度误差、误差变化率
- 输出变量:新风阀开度
- 规则库示例:
code复制如果 误差是正大 且 误差变化率是负小 则 输出是正大
如果 误差是正中 且 误差变化率是零 则 输出是正中
3.3 硬件在环(HIL)测试配置
在连接实际设备前,建议先用PLC仿真器测试:
- 在Simulink中启用External Mode
- 配置xPC Target或Speedgoat实时机
- 设置通信超时为3000ms
- 采样周期设置为0.1秒
典型问题排查:
- 通信中断:检查终端电阻(120Ω)是否接对
- 数据跳变:在信号线加磁环
- 控制振荡:检查接地是否良好
4. 工程实施中的坑与经验
4.1 信号干扰处理方案
在最近的一个项目中,我们遇到CO₂读数随机跳变的问题,最终发现是:
- 变频器动力线与RS485信号线平行走线
- 解决方案:
- 改用双绞屏蔽线(CAT5e)
- 增加信号隔离器(ADUM1201)
- 在Modbus配置中启用CRC校验
4.2 控制时序优化
多设备协同控制时的黄金法则:
- 先开风门后启动风机(间隔≥5秒)
- 调节水阀时保持风机转速恒定
- 紧急停机顺序:风机→风门→水阀
在Simulink中可以用Stateflow实现:
matlab复制chart('设备启停序列')
state('Standby')
% 初始状态
end
state('Startup')
entry: 打开风门();
after(5,sec): 启动风机();
end
state('Shutdown')
entry: 停止风机();
after(2,sec): 关闭风门();
end
end
4.3 系统可靠性提升技巧
- 心跳检测机制:
- 每个从站设备每30秒发送心跳包
- 连续丢失3次心跳判定为离线
- 在LabVIEW或Simulink中实现自动设备状态监测
- 数据缓存策略:
- 本地存储最近24小时原始数据
- 异常数据自动标记(如变化率>10%/秒)
- 采用环形缓冲区避免内存溢出
- 控制模式无缝切换:
matlab复制function output = mode_switch(auto_input, manual_input, switch_flag)
persistent last_output;
if isempty(last_output)
last_output = 0;
end
if switch_flag == 0 % 自动模式
output = auto_input;
else % 手动模式
% 带速率限制的切换
delta = manual_input - last_output;
if abs(delta) > 0.1
output = last_output + sign(delta)*0.1;
else
output = manual_input;
end
end
last_output = output;
end
这套系统我们已经成功应用在三个商业综合体的HVAC系统改造中,最直观的效果是:
- 能耗降低18-22%
- 设备故障率下降35%
- 室内空气质量达标率提升至99%以上
在实际调试中,最关键的是要建立完整的设备参数档案,记录每个传感器的校准数据和执行器的响应特性。我们团队现在维护着一个包含200+设备参数的数据库,这对快速部署新项目帮助巨大。