
1. 永磁同步电机匝间短路故障仿真概述
作为一名长期从事电机控制系统开发的工程师,我经常遇到永磁同步电机(PMSM)匝间短路故障的诊断难题。这种故障在实际运行中相当常见,却往往难以在早期被发现。通过Simulink仿真来模拟这类故障,不仅可以帮助我们深入理解故障机理,还能为开发故障诊断算法提供可靠的数据支持。
PMSM凭借其高功率密度、高效率等优势,已成为电动汽车、工业驱动等领域的首选电机类型。但在实际应用中,绕组绝缘老化、机械振动等因素都可能导致匝间短路故障。这种故障初期可能仅表现为轻微的性能下降,但若不及时处理,很快就会发展成更严重的相间短路或接地故障,造成电机损毁。
2. PMSM基本原理与数学模型
2.1 电机结构与工作原理
PMSM的核心结构包括定子和转子两部分。定子上嵌有三相对称绕组,通常采用星形(Y)连接;转子则采用高性能永磁体(如钕铁硼)构成。当定子三相绕组通入相位差120°的交流电时,会产生旋转磁场。这个旋转磁场与转子永磁体的磁场相互作用,产生电磁转矩驱动电机旋转。
在实际工程中,我们常用到的PMSM有两种类型:
- 表贴式永磁同步电机(SPMSM):永磁体直接粘贴在转子表面
- 内置式永磁同步电机(IPMSM):永磁体嵌入转子铁芯内部
2.2 数学模型建立
为了准确描述PMSM的动态特性,我们需要建立其数学模型。在三相静止坐标系下,电压方程可表示为:
[
\begin{cases}
u_a = R_s i_a + \frac{d\psi_a}{dt} \
u_b = R_s i_b + \frac{d\psi_b}{dt} \
u_c = R_s i_c + \frac{d\psi_c}{dt}
\end{cases}
]
其中:
- (u_a, u_b, u_c):三相绕组电压(V)
- (i_a, i_b, i_c):三相绕组电流(A)
- (R_s):定子绕组电阻(Ω)
- (\psi_a, \psi_b, \psi_c):三相绕组磁链(Wb)
电磁转矩方程为:
[ T_e = n_p (\psi_a i_a + \psi_b i_b + \psi_c i_c) ]
其中(n_p)为电机极对数。
提示:在实际仿真中,我们通常会将这些方程转换到d-q旋转坐标系下,可以大大简化计算复杂度。
3. Simulink仿真模型搭建
3.1 基础模型配置
在Simulink中搭建PMSM模型时,我们可以直接使用Simscape Electrical库中的"Permanent Magnet Synchronous Machine"模块。这个模块已经内置了PMSM的完整数学模型,只需配置相应参数即可。
以一个3kW、1500r/min的电机为例,典型参数设置如下:
matlab复制Pn = 3000; % 额定功率3kW
Un = 220; % 额定电压220V
fn = 50; % 额定频率50Hz
nn = 1500; % 额定转速1500r/min
Rs = 1.5; % 定子电阻1.5Ω
Ld = 0.01; % d轴电感0.01H
Lq = 0.01; % q轴电感0.01H
psi_f = 0.8; % 永磁体磁链0.8Wb
J = 0.02; % 转动惯量0.02kg·m²
B = 0.001; % 摩擦系数0.001N·m·s
np = 4; % 极对数4
3.2 匝间短路故障模拟
模拟匝间短路故障的关键是在正常绕组中引入一个可控的短路路径。具体实现方法如下:
- 在目标相(如A相)绕组两端并联一个由开关控制的电阻支路
- 正常运行时,开关断开,电阻支路不导通
- 故障发生时,开关闭合,小电阻接入模拟短路
Simulink实现代码示例:
matlab复制fault_time = 0.5; % 故障发生时间0.5s
R_short = 0.01; % 短路电阻0.01Ω
R_normal = 1000; % 正常时大电阻
% Switch控制逻辑
if t >= fault_time
R_fault = R_short;
else
R_fault = R_normal;
end
3.3 测量系统搭建
为了全面分析故障特征,需要配置以下测量模块:
- 三相电流测量:使用"Current Measurement"模块
- 三相电压测量:使用"Voltage Measurement"模块
- 转速/位置测量:使用"Speed Sensor"和"Position Sensor"模块
- 转矩测量:直接从电机模块输出端获取电磁转矩信号
注意:测量模块的输出信号应连接到"Scope"或"To Workspace"模块,方便后续分析。
4. 仿真结果分析与故障特征提取
4.1 电流波形分析
正常运行时,三相电流应呈现完美的正弦波形,幅值相等,相位互差120°。匝间短路故障会导致:
- 故障相电流幅值显著增大(可达正常值的2-3倍)
- 三相电流对称性被破坏
- 电流波形出现明显畸变,谐波含量增加
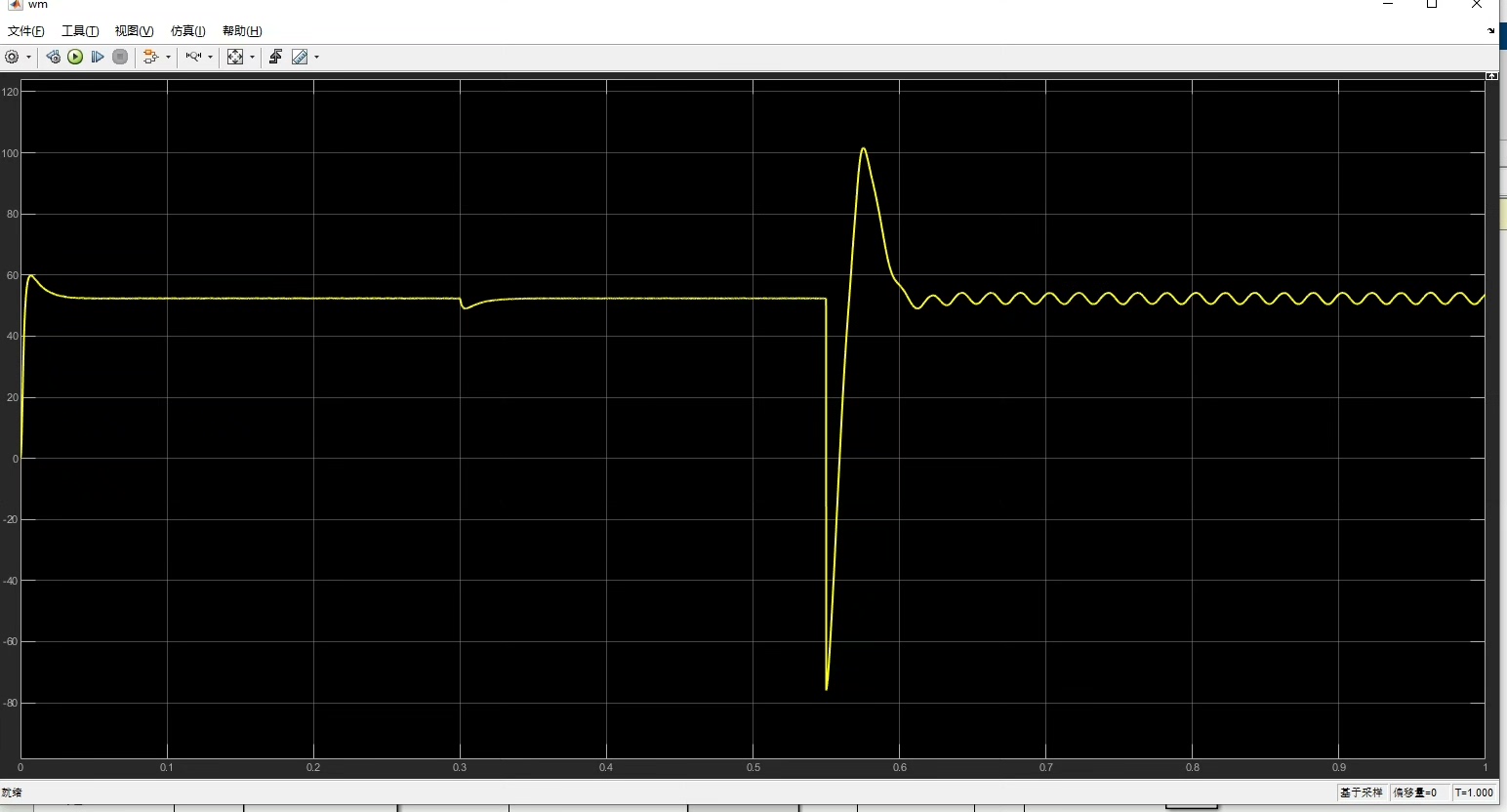
4.2 转矩波动分析
电磁转矩在故障前后会有明显变化:
- 正常运行时转矩平稳,纹波较小
- 故障发生后会出现周期性脉动,脉动频率与电机转速相关
- 平均转矩可能下降10%-20%
4.3 故障诊断指标
基于仿真结果,可以提取以下故障特征指标:
- 电流负序分量:故障后显著增大
- 谐波畸变率(THD):故障相THD明显升高
- 转矩脉动系数:故障后增大
- 特定频率成分:如2倍电源频率成分增强
5. 仿真中的常见问题与解决技巧
5.1 仿真不收敛问题
现象:仿真运行时出现代数环错误或不收敛警告。
解决方法:
- 检查模型中是否存在代数环,必要时加入"Memory"模块打破代数环
- 适当减小仿真步长,如从auto改为1e-5s
- 确保所有模块的初始条件设置合理
5.2 故障效果不明显
现象:设置了短路故障,但电流波形变化不明显。
排查步骤:
- 检查短路电阻值是否足够小(建议<0.1Ω)
- 确认开关控制信号是否正确触发
- 验证测量模块连接是否正确
5.3 提高仿真效率的技巧
- 使用"加速器(Accelerator)"模式运行大型模型
- 对不需要详细观察的部分使用简化模型
- 合理设置仿真停止时间,避免不必要的时间消耗
- 使用"To Workspace"模块替代多个Scope,减少内存占用
6. 实际工程应用建议
基于多年的仿真和实际项目经验,我总结出以下几点建议:
-
故障程度模拟:除了完全短路,还应模拟不同程度的匝间短路(如5%、10%匝数短路),更符合实际情况。
-
多故障组合:实际电机可能同时存在多种故障,可以尝试模拟匝间短路+轴承故障等复合故障场景。
-
参数敏感性分析:研究不同电机参数(如电感、电阻)对故障特征的影响,提高诊断算法的鲁棒性。
-
实时仿真验证:将离线仿真得到的诊断算法部署到实时仿真器(如dSPACE)中验证,确保在实际控制器上的可行性。
-
数据驱动方法:收集大量仿真数据训练机器学习模型,可以提高故障诊断的准确性。