
1. 问题现象与背景分析
最近在做一个西门子触摸屏项目迁移时,遇到了一个看似简单却让人头疼的问题:原本在老项目中正常显示的文字,迁移到新项目后死活不显示。作为一名有五年工控现场经验的工程师,我最初以为是文件损坏或者版本兼容性问题,反复复制粘贴了十几次,问题依旧存在。直到仔细对比两个项目的语言设置,才发现问题根源。
这种现象在HMI(人机界面)开发中其实相当常见,尤其是当项目涉及多语言环境或跨国团队协作时。西门子触摸屏(如KTP、TP系列)的文本显示机制与Windows系统不同,它高度依赖项目本身的语言环境设置。当源项目与目标项目的语言配置不一致时,就会出现文本"消失"的假象——实际上文本仍然存在,只是由于语言环境不匹配导致无法正确渲染。
2. 语言环境对HMI项目的影响机制
2.1 西门子HMI的文本管理架构
西门子TIA Portal中的文本管理采用分层结构:
- 项目语言:决定整个项目的默认显示语言
- 参考语言:作为文本翻译的基准语言
- 设备语言:触摸屏运行时实际使用的语言
这三层设置必须保持逻辑一致,否则就会出现文本显示异常。在项目迁移过程中,最容易忽略的就是参考语言的设置——即使项目语言设置正确,如果参考语言与源项目不一致,系统会认为这些文本是"未翻译"状态,从而不予显示。
2.2 典型问题场景还原
通过我的实际案例可以清晰看到问题现象:
- 源项目(图2):语言环境配置为中文,所有文本正常显示
- 目标项目(图1):语言环境保持默认的英语,导致中文字符无法渲染
这种问题特别容易发生在以下场景:
- 从模板创建新项目时
- 跨团队共享项目文件时
- 升级TIA Portal版本后
- 不同地区设备间的项目迁移
3. 完整解决方案与操作步骤
3.1 语言环境配置标准流程
按照以下步骤可彻底解决文本显示问题:
-
打开项目设置
- 在TIA Portal中右键点击项目名称
- 选择"项目语言"→"编辑语言"
-
设置项目语言
- 勾选"中文(简体)"
- 将其设为默认语言(点击星号图标)
-
配置参考语言
- 在"参考语言"下拉菜单中选择"中文(简体)"
- 确保与项目语言一致
-
同步文本资源
- 点击"文本列表"选项卡
- 全选所有文本条目
- 右键选择"同步到参考语言"
-
验证设置
- 返回画面编辑器
- 按F5刷新视图
- 检查所有文本是否正常显示
重要提示:完成设置后必须重新编译项目并下载到触摸屏,部分型号设备需要重启才能生效。
3.2 配置界面详解(配图说明)
如图3所示,语言设置界面包含三个关键区域:
- 可用语言列表:显示项目支持的语言包
- 默认语言标记:星号表示当前默认语言
- 参考语言选择器:决定文本比较的基准语言
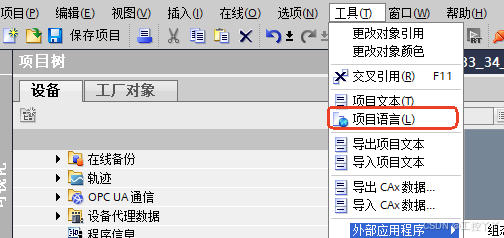
图3 语言设置主界面
4. 深度问题排查指南
4.1 进阶诊断方法
当标准解决方案无效时,可采用以下诊断流程:
-
检查文本属性
- 右键问题文本→属性
- 查看"文本"选项卡下的语言标记
- 确认没有启用"隐藏未翻译文本"选项
-
导出文本列表
- 使用"文本列表"导出功能
- 检查CSV文件中各语言的文本对应关系
- 特别注意空值或特殊字符
-
字体兼容性测试
- 尝试更改为Arial等通用字体
- 检查字体文件是否嵌入项目
- 对于亚洲语言,建议使用"Microsoft YaHei"
4.2 常见误操作黑名单
根据现场经验,这些操作会导致问题恶化:
- 直接修改项目文件中的语言代码
- 在运行时切换设备语言
- 使用第三方工具编辑项目文件
- 在不同TIA Portal版本间来回迁移
5. 预防性最佳实践
5.1 项目模板标准化建议
建议创建公司级项目模板时:
- 预设中文为默认语言
- 禁用不必要的语言包
- 内置常用中文字体
- 添加语言检查脚本
5.2 多语言项目开发规范
对于需要支持多语言的项目:
- 使用文本ID代替直接文本
- 建立完整的翻译术语表
- 定期执行语言一致性检查
- 为每种语言创建独立的字体配置
6. 底层原理与技术细节
6.1 西门子文本渲染引擎工作流程
- 运行时引擎首先检查设备当前语言
- 在项目资源中查找匹配的文本版本
- 如果找不到完全匹配,则回退到参考语言
- 最终根据字体设置进行渲染输出
6.2 编码与字符集处理
西门子HMI设备内部使用UTF-16编码,但在以下环节可能发生转换:
- 项目导入导出时(默认CP936编码)
- 与PLC通信时(ASCII或Unicode配置)
- 历史数据存储时(数据库编码设置)
7. 扩展应用场景
7.1 多语言动态切换实现
通过脚本实现运行时语言切换:
javascript复制// 在按钮事件中调用
SmartTags("LanguageSelector").Value = 2; // 2代表中文
Application.ReloadScreen();
7.2 自动化测试方案
建议在CI/CD流程中加入:
- 语言一致性检查
- 字体可用性验证
- 文本溢出测试
- 特殊字符测试用例
8. 现场问题实录
去年在汽车厂项目中遇到的典型case:
- 现象:部分设备显示"???"
- 原因:英文版Windows缺少中文字体
- 解决:在注册表添加字体重定向
reg复制[HKEY_LOCAL_MACHINE\SOFTWARE\Microsoft\Windows NT\CurrentVersion\FontLink\SystemLink]
"Microsoft YaHei"="simsun.ttc,SimSun"
9. 性能优化建议
对于包含大量文本的项目:
- 压缩未使用的语言资源
- 使用共享文本库
- 启用文本缓存功能
- 避免在循环中动态生成文本
10. 版本兼容性指南
各版本TIA Portal的语言处理差异:
- V13:初始多语言支持
- V15:引入文本批量处理
- V17:增强字体嵌入功能
- V18:改进编码转换性能
在实际项目迁移时,我通常会先导出所有文本资源作为备份,然后在新项目中重新建立语言环境,最后导入文本内容。这种方法虽然工作量稍大,但能避免各种潜在的兼容性问题。特别是当项目需要长期维护时,清晰的文本管理架构能为后续开发省去很多麻烦。