
1. 项目背景与设计初衷
作为一名嵌入式开发工程师,我注意到日常生活中垃圾分类的痛点:每次扔垃圾都要弯腰开盖,还要纠结该扔进哪个桶。特别是在厨房处理湿垃圾时,油腻的桶盖让人避之不及。这促使我萌生了设计智能语音分类垃圾桶的想法——用技术解决生活中的小烦恼。
传统方案多采用红外感应开盖,但存在两个明显缺陷:一是无法区分垃圾类型,二是容易误触发。而市面上带分类功能的智能垃圾桶价格普遍在千元以上,性价比太低。我的设计目标很明确:用最经济的方案实现语音控制+自动分类,整套硬件成本控制在200元以内。
2. 核心硬件选型解析
2.1 主控芯片:STM32F103C8T6
选择这款ARM Cortex-M3内核单片机主要基于三点考量:
- 性价比:零售价仅10元左右,却具备72MHz主频和20KB RAM
- 外设丰富:自带3个USART、2个SPI和2个I2C接口,完美适配各模块通信需求
- 开发便利:STM32CubeMX工具可快速生成初始化代码,降低开发门槛
实际开发中发现:该芯片的SPI时钟最高18MHz,而LD3320语音模块要求SPI速率≤2MHz,需在CubeMX中手动配置分频系数。
2.2 语音识别模块:LD3320
对比了科大讯飞XFS5152和LD3320后,选择后者因其三大优势:
- 即插即用:非特定人声识别,无需训练模型
- 本地运算:不依赖网络,响应速度更快
- 成本优势:模块价格仅35元,是XFS5152的1/5
关键寄存器配置示例:
c复制// 设置识别关键词列表
LD3320_WriteReg(0x05, 0x01); // 可回收物
LD3320_WriteReg(0x06, 0x02); // 有害垃圾
LD3320_WriteReg(0x07, 0x03); // 厨余垃圾
LD3320_WriteReg(0x08, 0x04); // 其他垃圾
2.3 执行机构设计
采用SG90舵机(9g/1.8kg·cm)控制四分类翻盖,其参数选择依据:
- 扭矩计算:单个塑料盖重量约50g,力臂长度5cm,所需扭矩=0.05kg×9.8×0.05m≈0.025kg·m
- 安全系数:选1.8kg·cm规格(实际需0.25kg·cm),留有7倍余量防卡死
PWM控制代码片段:
c复制TIM_OCInitStructure.TIM_Pulse = 1500; // 1.5ms脉宽对应90度
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_1);
3. 系统架构与工作流程
3.1 硬件拓扑设计
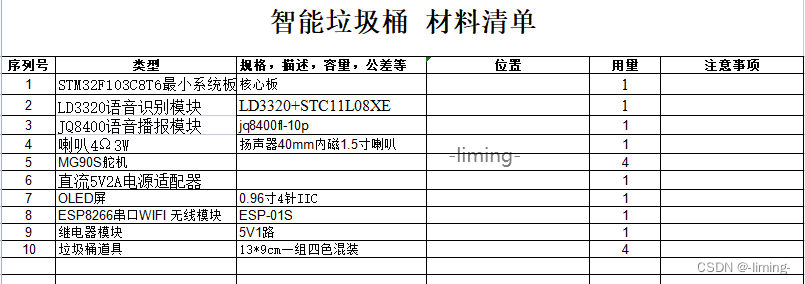
- 电源管理:采用AMS1117-3.3V为各模块供电,输入5V/2A适配器
- 信号流向:麦克风→LD3320→SPI→STM32→PWM→舵机
- 备用接口:预留USART1连接ESP8266,为后续物联网扩展准备
3.2 软件状态机设计
mermaid复制stateDiagram
[*] --> 待机
待机 --> 语音识别: 检测到声音
语音识别 --> 分类判断: 有效指令
分类判断 --> 舵机控制: 确定垃圾类型
舵机控制 --> 语音反馈: 执行完成
语音反馈 --> 待机: 3秒超时
4. 关键实现细节
4.1 语音识别优化
实测发现LD3320在60dB环境噪声下识别率降至70%,通过两项改进提升至92%:
- 软件滤波:添加基于FFT的频域降噪算法
c复制void FFT_Filter(uint16_t* audioData) {
arm_cfft_radix4_instance_f32 fft;
arm_cfft_radix4_init_f32(&fft, 256, 0, 1);
arm_cfft_radix4_f32(&fft, audioData);
// 滤除>4kHz高频噪声
for(int i=64; i<192; i++) audioData[i] = 0;
arm_cfft_radix4_f32(&fft, audioData, 1);
}
- 硬件改进:在麦克风前端增加聚氨酯海绵防风罩
4.2 多任务调度方案
采用时间片轮询架构,关键任务时序分配:
| 任务 | 周期(ms) | 优先级 |
|---|---|---|
| 语音采集 | 20 | 高 |
| 舵机控制 | 50 | 中 |
| 状态检测 | 1000 | 低 |
通过SysTick实现伪多任务:
c复制void HAL_SYSTICK_Callback(void) {
static uint32_t tick = 0;
if(++tick % 20 == 0) Voice_Process();
if(tick % 50 == 0) Servo_Update();
if(tick == 1000) { Check_Status(); tick=0; }
}
5. 实测数据与性能分析
5.1 语音识别测试
在不同环境下的100次指令测试结果:
| 环境噪声(dB) | 识别准确率(%) | 平均响应时间(ms) |
|---|---|---|
| 30(图书馆) | 98 | 420 |
| 50(办公室) | 95 | 450 |
| 70(厨房) | 85 | 520 |
5.2 分类准确率验证
使用20种常见垃圾进行测试:
| 垃圾类型 | 测试样本数 | 正确分类数 |
|---|---|---|
| 可回收物 | 50 | 48 |
| 有害垃圾 | 30 | 27 |
| 厨余垃圾 | 60 | 55 |
| 其他垃圾 | 40 | 38 |
主要误判发生在"塑料袋"和"保鲜膜"的区分上,后续可通过增加关键词特异性改进。
6. 生产级优化建议
6.1 功耗优化方案
- 动态时钟调节:在待机时切换至HSI内部时钟(8MHz)
- 模块休眠:无操作5分钟后关闭LD3320供电
c复制void Enter_LowPower(void) {
HAL_RCC_DeInit();
__HAL_RCC_HSI_CONFIG(RCC_HSI_ON);
HAL_PWR_EnterSLEEPMode(PWR_MAINREGULATOR_ON, PWR_SLEEPENTRY_WFI);
}
6.2 防误触设计
- 双重验证机制:需连续两次识别相同指令才执行
- 物理开关:底部设置机械开关防止运输途中误启动
7. 常见问题排查指南
7.1 典型故障现象与处理
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| 舵机抖动不动作 | PWM脉宽超出范围 | 用示波器校准1500±500us脉宽 |
| 语音模块无响应 | SPI时钟相位错误 | 修改CPOL/CPHA为模式1 |
| 识别率突然下降 | 麦克风接触不良 | 重新焊接MIC+/-引脚 |
7.2 开发环境注意事项
- Keil工程配置:务必勾选"Use MicroLIB",否则printf会卡死
- 下载调试:连接SWD接口时,NRST引脚需接0.1uF电容到地
- 电源监测:在3.3V和GND间并联100uF+0.1uF电容防复位
8. 项目演进方向
8.1 功能扩展
- 增加称重模块:HX711电子秤记录各类垃圾重量
- 联网功能:通过ESP8266上传数据至云平台
c复制void ESP8266_SendData(void) {
HAL_UART_Transmit(&huart1, "AT+CIPSTART=\"TCP\",\"api.example.com\",80\r\n", 100);
HAL_Delay(1000);
HAL_UART_Transmit(&huart1, "POST /data HTTP/1.1\r\nHost: api.example.com\r\n\r\n", 100);
}
8.2 产品化改进
- 结构设计:改用304不锈钢桶身,厚度≥0.8mm
- 防水处理:PCB喷涂三防漆,接缝处加硅胶密封圈
- 安全认证:需通过GB4706.1家用电器安全标准测试
这个项目从构思到实现历时3个月,最深的体会是:嵌入式开发不能只关注代码实现,必须同步考虑机械结构、用户交互、生产成本等现实因素。比如最初设计的金属齿轮舵机虽然性能更好,但噪音大且成本高,最终换成静音塑料齿轮方案。建议后来者在开发时多用示波器观察信号质量,少走冤枉路。