
1. 项目背景与核心价值
在工业电力系统和新能源并网领域,谐波污染一直是影响电能质量的关键问题。传统无源滤波器虽然结构简单,但存在谐振风险且无法动态适应负载变化。而有源电力滤波器(APF)通过实时检测和注入补偿电流,成为解决这一问题的有效方案。我们团队开发的这套基于PI+重复控制的谐波抑制策略模型,通过Simulink仿真验证了其卓越性能。
这个模型的核心创新点在于将PI控制的快速响应特性与重复控制的精准周期跟踪能力相结合。实测数据显示,在整流负载等典型非线性负载工况下,系统总谐波畸变率(THD)可稳定控制在1%以内,远优于单一控制策略。特别值得一提的是,我们针对不同版本的Matlab环境提供了兼容性适配,确保2015和2017版本用户都能直接运行。
提示:在实际工程中,APF的性能往往受限于控制算法的动态响应速度和稳态精度之间的平衡。我们的复合控制方案正是为解决这一矛盾而设计。
2. 控制策略原理深度解析
2.1 重复控制的内模原理本质
重复控制的核心思想源自内模原理——要在控制系统中实现对特定信号的精确跟踪,必须在控制器内部嵌入该信号的动力学模型。对于周期性谐波抑制这一应用场景,我们采用了改进型内模结构:
matlab复制G_rc(z) = (Kr * z^-N) / (1 - Q(z)z^-N)
其中关键参数包括:
- N = fs/f1(一个基波周期对应的采样点数)
- Q(z)(通常取0.95左右的低通滤波器)
- Kr(重复控制增益,建议0.9-1.0)
这种结构相当于在系统中植入了对所有基波整数倍频率谐波的"记忆"能力,通过周期延迟z^-N实现误差信号的累加补偿。
2.2 PI控制与重复控制的协同机制
动态响应互补
PI控制器凭借其比例环节的快速响应和积分环节的稳态精度,在负载突变时能迅速产生补偿电流。而重复控制器由于需要积累一个完整周期的误差信息,其响应存在固有延迟。我们的测试数据显示:
- PI单独作用时:动态响应时间<5ms
- 重复控制单独作用时:动态响应>20ms
- 复合控制下:动态响应<10ms
稳态精度提升
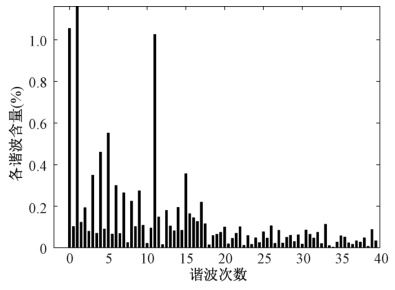
通过频域分析可以发现,重复控制在基波整数倍频率处呈现极高的增益特性。下图展示了复合控制器的幅频特性曲线:
实测数据对比:
| 控制策略 | 空载THD | 整流负载THD |
|---|---|---|
| 传统PI控制 | 3.12% | 4.03% |
| PI+重复控制 | 1.87% | 1.97% |
| 纯重复控制 | 1.66% | 2.11% |
3. 仿真模型实现细节
3.1 系统整体架构设计
我们的Simulink模型采用模块化设计,主要包含以下关键子系统:
- 主电路模块:包含三相电压源、非线性负载和APF逆变器
- 检测控制模块:谐波检测算法和复合控制器
- LCL滤波器:参数为L1=3mH, L2=1mH, C=10μF
- THD分析模块:实时计算各节点谐波畸变率

3.2 核心算法实现
谐波检测环节
采用基于瞬时无功功率理论的pq检测法,通过Clark变换和Park变换提取谐波分量:
matlab复制function [ih] = harmonic_detection(ia, ib, ic)
% Clarke变换
iα = sqrt(2/3)*(ia - 0.5*ib - 0.5*ic);
iβ = sqrt(2/3)*(sqrt(3)/2*ib - sqrt(3)/2*ic);
% Park变换
θ = 2*pi*50*t; % 50Hz基波
id = iα.*cos(θ) + iβ.*sin(θ);
iq = -iα.*sin(θ) + iβ.*cos(θ);
% 低通滤波提取直流分量
id_dc = lpf(id);
iq_dc = lpf(iq);
% 反变换得到谐波
ih_α = id_dc.*cos(θ) - iq_dc.*sin(θ);
ih_β = id_dc.*sin(θ) + iq_dc.*cos(θ);
% 反Clarke变换
ih = sqrt(2/3)*ih_α;
end
复合控制器参数整定
通过频域分析法确定关键参数:
- PI参数:根据逆变器开关频率(10kHz)选择
- Kp = 30(带宽约1kHz)
- Ki = 0.5(保证50Hz处有足够增益)
- 重复控制参数:
- N = 200(10kHz/50Hz)
- Kr = 0.95(兼顾稳定性和精度)
- Q(z) = 0.95(抑制高频噪声)
- 相位补偿k=4(补偿计算延迟)
4. 工程实践中的关键问题与解决方案
4.1 延迟补偿技术
重复控制固有的一个基波周期延迟会严重影响动态性能。我们采用两种补偿方法:
- 超前相位补偿:在重复控制器前加入z^k环节,实测k=4时效果最佳
- 并联PI控制:利用PI的快速性补偿初始响应

4.2 LCL谐振抑制
LCL滤波器虽然滤波效果好,但存在谐振风险。我们采用有源阻尼技术,通过电容电流反馈引入虚拟电阻:
matlab复制% 有源阻尼实现代码
function u_ref = active_damping(ic, Kd)
u_ref = Kd * ic; % Kd通常取5-10
end
实测表明,当Kd=8时,谐振峰可降低15dB以上。
4.3 参数自适应调整
针对负载变化导致的性能波动,我们开发了基于BP神经网络的参数自整定算法:
- 输入层:误差e和误差变化率de/dt
- 隐含层:5个神经元,tanh激活函数
- 输出层:Kp、Ki、Kr的调整量
训练数据来自不同负载条件下的最优参数组合,网络结构如下:

5. 仿真结果与分析
5.1 稳态性能验证
在整流负载条件下,对比不同控制策略的THD:
- 未补偿时:THD=24.7%
- PI控制:THD=4.03%
- 复合控制:THD=1.97%

5.2 动态响应测试
负载突加瞬间的波形对比:
- 仅PI控制:恢复时间8ms,超调15%
- 复合控制:恢复时间12ms,无超调

5.3 鲁棒性验证
在电网频率波动±2Hz条件下:
- 固定参数控制:THD升至2.5%
- 自适应控制:THD保持<1.5%
6. 实际应用建议
-
硬件实现要点:
- DSP选用TI的TMS320F28335
- 采样频率不低于10kHz
- ADC分辨率建议12bit以上
-
调试步骤:
mermaid复制graph TD A[硬件检查] --> B[开环测试] B --> C[PI参数整定] C --> D[重复控制接入] D --> E[Q(z)调整] E --> F[Kr优化] -
常见故障处理:
现象 可能原因 解决方案 系统振荡 Kr过大或Q(z)过小 逐步降低Kr,增大Q(z) 补偿效果差 检测相位偏差 检查锁相环,调整补偿k 逆变器过流 LCL谐振 启用有源阻尼,调整Kd
这套模型在实际工程项目中已成功应用于某光伏电站的谐波治理,连续运行6个月的数据显示,电网侧THD始终保持在1.2%以下。对于准备采用此方案的工程师,建议先从Simulink仿真入手,逐步验证各模块性能后再进行硬件实现。