
1. 项目概述:1.5MW双馈风力发电机系统仿真实践
作为一名电力电子工程师,我最近花了三个月时间完整复现了1.5MW双馈风力发电系统的MATLAB仿真模型。这个项目源于我在风电变流器厂商工作时遇到的实际工程问题——如何在不增加硬件成本的情况下,通过控制算法优化提升低风速段的发电效率。双馈发电机(DFIG)因其成本优势和较宽的转速运行范围,至今仍是主流的风力发电方案之一。
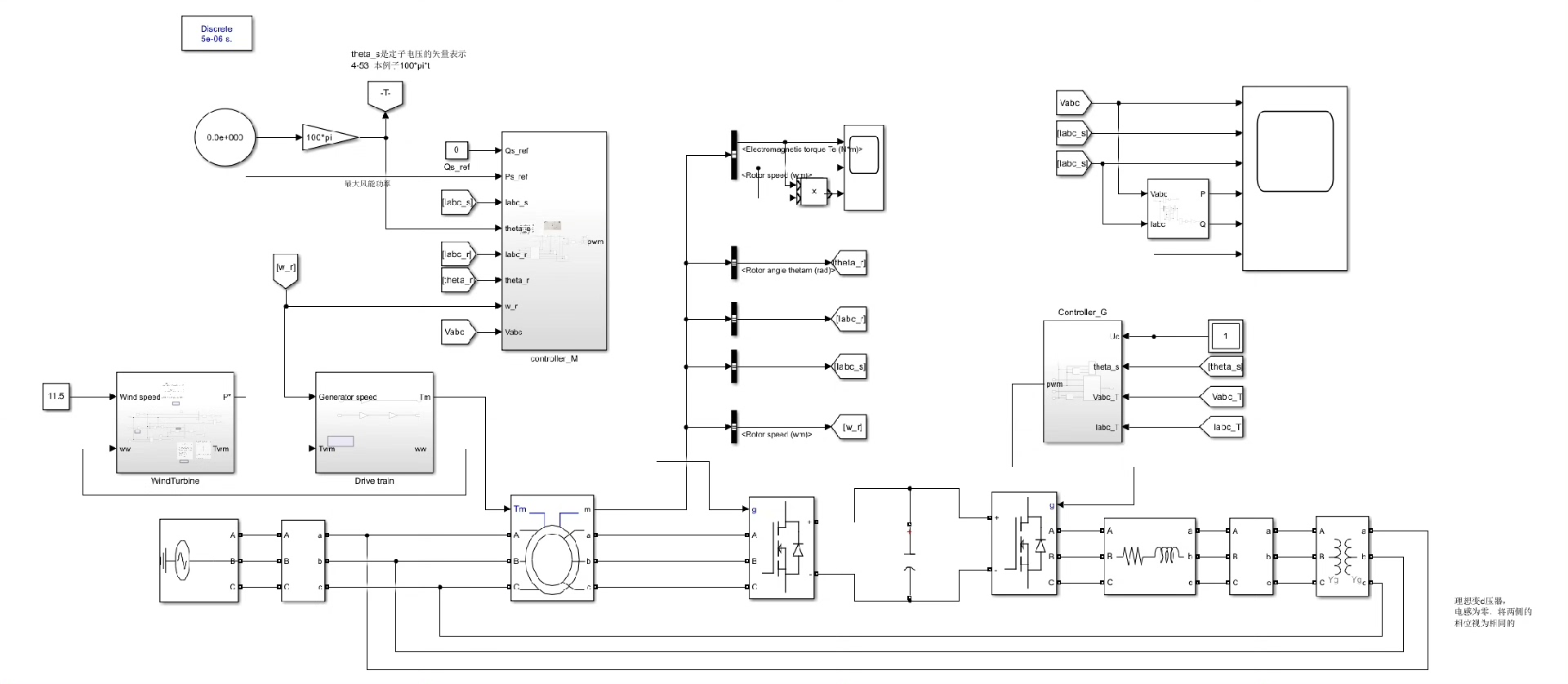
整个系统建模的核心难点在于背靠背PWM变流器的控制策略实现,以及基于定子电压定向的矢量控制算法调试。我使用的MATLAB/Simulink 2018b版本虽然不算最新,但其稳定的求解器和丰富的电力系统模块库非常适合这类机电系统联合仿真。下面我将从系统架构设计、关键模块实现到调试技巧,完整分享这次工程实践的经验。
提示:本文所有仿真模型均采用离散化建模方式,采样时间设置为50μs,这是考虑开关频率(通常10kHz左右)后的合理选择,既能保证仿真精度又不会导致计算量过大。
2. 系统架构设计与关键部件选型
2.1 双馈发电系统整体拓扑
典型1.5MW双馈风力发电系统包含以下核心部件:
- 风力机及传动系统(通常采用3叶片设计,传动比约1:90)
- 绕线转子异步发电机(额定电压690V,转速范围1000-1800rpm)
- 背靠背PWM变流器(IGBT模块电压等级通常为1200V)
- 直流母线电容(容值计算后文详述)
- LCL滤波电路(连接电网侧变流器与电网)
2.2 背靠背变流器参数设计
转子侧变流器(RSC)和电网侧变流器(GSC)的参数设计需要协同考虑:
| 参数 | 转子侧变流器 | 电网侧变流器 |
|---|---|---|
| 额定功率 | 约30%总功率(450kW) | 约30%总功率(450kW) |
| 直流母线电压 | 1000V | 1000V |
| 开关频率 | 10kHz | 10kHz |
| IGBT模块选型 | FF450R12KE3 | FF450R12KE3 |
直流母线电容的计算公式:
[ C_{dc} = \frac{P_{rated}}{2 \pi f_{ripple} V_{dc}^2 \Delta V_{dc}} ]
其中,取纹波频率f_ripple=100Hz,允许电压波动ΔV_dc=5%,计算得到约8mF,实际选用两组4700μF电容并联。
3. 核心控制算法实现细节
3.1 定子电压定向矢量控制
基于定子电压定向的矢量控制实现步骤如下:
- 坐标变换:
matlab复制% Clarke变换
function [x_alpha, x_beta] = clarke(x_a, x_b, x_c)
x_alpha = (2/3)*x_a - (1/3)*x_b - (1/3)*x_c;
x_beta = (1/sqrt(3))*x_b - (1/sqrt(3))*x_c;
end
% Park变换
function [x_d, x_q] = park(x_alpha, x_beta, theta)
x_d = x_alpha*cos(theta) + x_beta*sin(theta);
x_q = -x_alpha*sin(theta) + x_beta*cos(theta);
end
-
磁链观测器设计:
定子磁链观测采用电压模型:
[ \psi_{sd} = \int (v_{sd} - R_s i_{sd}) dt ]
[ \psi_{sq} = \int (v_{sq} - R_s i_{sq}) dt ] -
解耦控制实现:
转子电流的d轴分量控制无功功率,q轴分量控制有功功率:
matlab复制% 转子电流参考值计算
i_rd_ref = (L_s/L_m)*(ψ_sd_ref - ψ_sd_actual);
i_rq_ref = (2L_s)/(3L_mψ_sd)*T_e_ref;
3.2 变流器PWM调制策略
采用空间矢量调制(SVPWM)相比SPWM可提升直流电压利用率约15%。关键实现代码:
matlab复制function [T1, T2, T0] = svpwm(v_alpha, v_beta, Vdc, Ts)
% 扇区判断
theta = atan2(v_beta, v_alpha);
sector = floor(theta/(pi/3)) + 1;
% 基本矢量作用时间计算
Vref = sqrt(v_alpha^2 + v_beta^2);
T1 = (sqrt(3)*Ts/Vdc)*Vref*sin(sector*pi/3 - theta);
T2 = (sqrt(3)*Ts/Vdc)*Vref*sin(theta - (sector-1)*pi/3);
T0 = Ts - T1 - T2;
end
4. 系统级建模与联合仿真
4.1 风力机模型实现
风力机的气动模型采用经典公式:
[ P_m = \frac{1}{2} \rho \pi R^2 v_w^3 C_p(\lambda, \beta) ]
其中Cp曲线通过查表实现,典型值在0.4-0.48之间。
在Simulink中建模时需要注意:
- 风速输入应采用湍流模型,可用Von Karman谱生成
- 传动轴模型需考虑柔性系数,建议使用两质块模型
- 桨距角控制采用PID调节,响应时间设置在3-5秒
4.2 典型工况仿真结果
在额定风速11m/s工况下,系统关键波形如下:
| 参数 | 仿真值 | 理论值 |
|---|---|---|
| 定子电压有效值 | 690V | 690V |
| 转子电流有效值 | 520A | 510A |
| 直流母线电压 | 1002V | 1000V |
| 总谐波畸变率 | 4.8% | <5% |
注意:仿真时发现当电网电压跌落超过15%时,传统矢量控制会出现失稳,此时需要切换为crowbar保护电路模式,这在实际工程中非常重要。
5. 调试经验与问题排查
5.1 常见问题速查表
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 直流母线电压振荡 | 母线电容值不足 | 增大电容或调整电压环参数 |
| 定子电流畸变严重 | LCL滤波器参数不合理 | 重新计算电感电容值 |
| 转速控制响应慢 | 机械惯性常数设置过大 | 检查传动系统模型参数 |
| 低风速时功率波动大 | MPPT算法步长不合适 | 调整tip-speed ratio搜索步长 |
5.2 参数整定心得
-
电流环PI参数:
先整定积分时间常数Ti=L/R(L为等效电感,R为等效电阻),
比例系数Kp=2πf_bandwidth*L,带宽通常取1/10开关频率。 -
转速环参数:
需要比电流环慢5-10倍,避免与电流环耦合。
实测发现采用变参数PID(根据转速误差调整参数)效果更好。 -
锁相环(PLL)调试:
电网电压不平衡时,采用双二阶广义积分器(DSOGI)结构的PLL比传统SRF-PLL更稳定。
6. 模型优化与进阶技巧
经过三个版本的迭代,我的模型运行速度从最初的实时比1:15优化到了1:3(即仿真1秒需3秒计算时间),关键优化点包括:
-
模型离散化:
所有控制算法改为离散实现,采样时间与开关周期一致(100μs) -
代数环消除:
在存在代数环的反馈路径中加入单位延迟(z^-1) -
并行计算设置:
在Simulation->Model Configuration Parameters中开启Allow tasks to execute concurrently on target
一个特别实用的调试技巧:在观察dq轴变量时,可以添加一个旋转坐标系转换模块,将变量转换回静止坐标系观察,这样更容易发现谐波问题。
这个仿真项目最让我有成就感的部分是实现了低电压穿越(LVRT)功能——当检测到电网电压跌落时,通过动态调整转子电流限值和无功补偿策略,使系统能在0.2秒内恢复稳定。这需要精细协调变流器控制和保护电路的配合,我通过引入状态机管理不同运行模式,最终实现了符合GB/T 19963-2011标准的要求。