
1. 项目背景与ThreadX RTOS简介
作为一名长期从事嵌入式开发的工程师,我最近在实际项目中完成了ThreadX RTOS在STM32平台上的移植工作。ThreadX作为一款被微软收购后开源的实时操作系统,目前采用MIT许可证,这意味着我们可以完全免费地将其用于商业项目,无需担心版权问题。根据官方数据,全球已有超过120亿台设备运行着ThreadX,甚至包括太空任务中的关键系统,其稳定性和可靠性已经得到充分验证。
选择ThreadX的主要原因在于:
- 完全开源:所有核心代码开放,便于深度定制和问题排查
- 商业友好:MIT许可证允许无限制的商业使用
- 成熟稳定:经过太空级应用的验证
- 资源占用小:特别适合STM32这类资源有限的微控制器
在开始移植前,我们需要准备以下环境:
- STM32CubeMX最新版本(本文使用6.9.2)
- STM32G4系列支持包(或您使用的具体芯片系列)
- X-CUBE-AZRTOS-G4软件包
- 开发工具链(Keil/IAR/STM32CubeIDE等)
提示:虽然本文以STM32G474VET6为例,但移植方法同样适用于其他STM32系列芯片,只需选择对应的软件包即可。
2. 硬件平台搭建与基础配置
2.1 开发板选型与外围电路设计
我使用的是自制开发板,基于STM32G474VET6芯片,主要外设包括:
- 8个GPIO(连接LED和按键)
- 1个USART用于调试输出
- 1个RS485接口
- 4个PWM输出(驱动电机)
- 外部8MHz晶振
- SWD调试接口
对于ThreadX移植演示,实际上只需要一个GPIO(连接LED)和一个USART即可。其他外设是为了展示在实际项目中的综合应用。
2.2 CubeMX基础工程创建
- 打开STM32CubeMX,创建新项目
- 选择对应芯片型号(STM32G474VETx)
- 配置时钟树:
- HSE选择Crystal/Ceramic Resonator
- 主频设置为170MHz(根据芯片规格调整)
- 启用必要的外设:
- GPIO:PC13(连接LED)
- USART2:异步模式,115200波特率
- TIM7:作为系统时基
注意:ThreadX需要使用除SysTick外的定时器作为时基源,这是关键配置点。
3. ThreadX软件包安装与配置
3.1 安装X-CUBE-AZRTOS-G4软件包
- 在CubeMX界面点击"Help" -> "Manage embedded software packages"
- 在弹出窗口中搜索"X-CUBE-AZRTOS-G4"
- 选择最新版本(本文使用6.2.0)并安装
如果软件包列表中找不到或显示灰色,可能是以下原因:
- 网络连接问题
- CubeMX版本过旧
- 芯片系列不支持
解决方案:
- 检查网络设置
- 更新CubeMX到最新版本
- 确认芯片是否在支持列表中
3.2 ThreadX核心配置
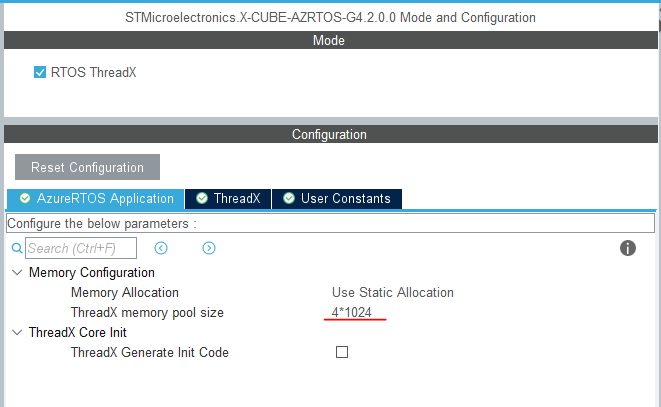
安装完成后,在Middleware and Software Packs中启用ThreadX:
- 勾选"ThreadX"
- 配置参数:
- TX_TIMER_TICKS_PER_SECOND:1000(1ms时基)
- TX_MINIMUM_STACK:512(最小栈大小)
- TX_TIMER_THREAD_PRIORITY:10(定时器线程优先级)
- 在"Platform Settings"中:
- 启用"Use Dynamic Memory Allocation"
- 设置"Default Thread Stack Size"为1024
关键配置截图示例:
3.3 系统时基配置
在"SYS"配置中:
- 将"Timebase Source"改为TIM7(或其他非SysTick定时器)
- 配置TIM7:
- 预分频:16999(170MHz/17000=10kHz)
- 计数周期:9(10kHz/10=1kHz)
这样配置后,ThreadX将获得1ms的系统时基。
4. 工程生成与代码结构解析
4.1 生成代码前的最后检查
在生成代码前,建议检查以下关键点:
- Project Manager设置:
- Toolchain/IDE选择正确
- "Linker Settings"中堆栈大小适当增加
- 勾选"Generate peripheral initialization as a pair of .c/.h files"
- ThreadX配置确认:
- 时基源不是SysTick
- 内存分配方式符合需求
- 优先级设置合理
4.2 生成的代码结构分析
点击"GENERATE CODE"后,CubeMX会生成完整的工程。关键目录和文件包括:
code复制├── Core
│ ├── Inc
│ │ ├── main.h
│ │ ├── tx_api.h # ThreadX API头文件
│ │ └── ...
│ ├── Src
│ │ ├── main.c
│ │ ├── tx_initialize.c # ThreadX初始化
│ │ └── ...
├── Drivers
├── Middlewares
│ └── ThreadX
│ ├── RTOS
│ │ ├── ThreadX # ThreadX核心源码
│ │ └── ...
└── ...
4.3 关键文件说明
-
app_threadx.c:ThreadX应用入口
- 包含
App_ThreadX_Init()函数,系统启动后首先执行 - 需要在此注册用户线程和回调函数
- 包含
-
tx_initialize_low_level.s:底层汇编初始化
- 处理与硬件相关的初始化
- 通常不需要修改
-
main.c:主程序
main()函数中调用MX_ThreadX_Init()- 硬件初始化完成后启动ThreadX调度器
5. 应用线程开发实践
5.1 创建用户线程
我建议将用户线程代码组织在独立的文件中,例如my_app.h和my_app.c。
my_app.h内容示例:
c复制#define THREAD1_STACK_SIZE 1024
#define THREAD1_PRIORITY 28
#define IDLE_THREAD_STACK_SIZE 1024
#define IDLE_THREAD_PRIORITY 31
void thread1_entry(ULONG thread_input);
void thread_idle_entry(ULONG thread_input);
my_app.c内容示例:
c复制#include "my_app.h"
#include "main.h"
#include "tx_api.h"
extern TX_THREAD thread1;
extern TX_THREAD thread_idle;
uint8_t thread1_stack[THREAD1_STACK_SIZE];
uint8_t idle_thread_stack[IDLE_THREAD_STACK_SIZE];
void thread1_entry(ULONG thread_input) {
while(1) {
HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13);
printf("Thread1 running\r\n");
tx_thread_sleep(50); // 延时50个tick(50ms)
}
}
void thread_idle_entry(ULONG thread_input) {
while(1) {
// 电机正转20秒
set_motor_direction(FORWARD);
tx_thread_sleep(20000);
// 停止5秒
set_motor_direction(STOP);
tx_thread_sleep(5000);
// 电机反转20秒
set_motor_direction(BACKWARD);
tx_thread_sleep(20000);
// 停止5秒
set_motor_direction(STOP);
tx_thread_sleep(5000);
printf("Firmware Version: 1.0.0\r\n");
tx_thread_sleep(3000);
}
}
5.2 线程注册与启动
在app_threadx.c中注册线程:
c复制#include "my_app.h"
TX_THREAD thread1;
TX_THREAD thread_idle;
void App_ThreadX_Init(void) {
// 创建线程1
tx_thread_create(&thread1, "Thread 1",
thread1_entry, 0,
thread1_stack, THREAD1_STACK_SIZE,
THREAD1_PRIORITY, THREAD1_PRIORITY,
TX_NO_TIME_SLICE, TX_AUTO_START);
// 创建空闲线程
tx_thread_create(&thread_idle, "IDLE Thread",
thread_idle_entry, 0,
idle_thread_stack, IDLE_THREAD_STACK_SIZE,
IDLE_THREAD_PRIORITY, IDLE_THREAD_PRIORITY,
TX_NO_TIME_SLICE, TX_AUTO_START);
// 注册堆栈错误处理回调
tx_thread_stack_error_notify(stack_error_handler);
}
5.3 编译配置调整
根据工程使用的工具链,可能需要调整以下设置:
- 堆栈大小:在链接脚本中增加堆栈空间
- 优化等级:建议使用-O1或-O2优化
- C标准:建议使用C11或更高
- 包含路径:确保ThreadX头文件路径正确
对于Keil用户,需要在"Options for Target"中:
- 勾选"Use MicroLIB"(如果使用printf)
- 设置"Heap Size"至少0x1000
6. 调试与性能优化
6.1 常见调试技巧
-
线程状态监控:
- 使用
tx_thread_info_get()获取线程信息 - 监控堆栈使用情况,防止溢出
- 使用
-
系统性能分析:
c复制void print_system_stats() { ULONG available_bytes; tx_byte_available(&available_bytes); printf("Available memory: %lu bytes\r\n", available_bytes); ULONG thread_count; tx_thread_identify(&thread_count); printf("Active threads: %lu\r\n", thread_count); } -
优先级反转问题:
- 使用互斥量的优先级继承特性
- 合理设置线程优先级
6.2 性能优化建议
-
堆栈大小优化:
- 通过
tx_thread_stack_error_notify监控堆栈使用 - 逐步减小堆栈直到出现错误,然后适当增加
- 通过
-
内存管理:
- 使用ThreadX内存池代替动态分配
- 预分配常用对象
-
中断处理:
- 保持ISR尽可能短
- 将耗时操作移到线程中
7. 实际运行效果验证
下载程序到开发板后,可以通过以下方式验证:
- LED指示灯:应按照设定的50ms间隔闪烁
- 串口输出:应定期打印"Thread1 running"和版本信息
- 调试器观察:
- 在线程入口设置断点
- 查看线程切换情况
- 监控堆栈使用情况
典型运行效果:
code复制Thread1 running
Thread1 running
Firmware Version: 1.0.0
Thread1 running
Thread1 running
...
8. 进阶应用与扩展
8.1 添加更多系统组件
ThreadX提供了丰富的中间件:
- FileX:文件系统
- NetX:网络协议栈
- USBX:USB协议栈
添加方法:
- 在CubeMX中启用对应组件
- 配置相关参数
- 参考官方示例代码集成
8.2 多核支持(STM32H7等)
对于支持多核的STM32芯片:
- 在CubeMX中配置多核
- 为每个核创建独立的ThreadX实例
- 使用共享内存进行核间通信
8.3 低功耗设计
结合ThreadX的电源管理:
- 合理使用
tx_thread_sleep - 在空闲线程中进入低功耗模式
- 配置外设时钟门控
9. 移植过程中的常见问题与解决方案
9.1 编译错误排查
-
未定义引用错误:
- 检查是否包含所有必要源文件
- 确认链接脚本正确
-
内存不足:
- 调整堆栈大小
- 优化内存使用
-
硬件异常:
- 检查时钟配置
- 验证中断优先级
9.2 运行时问题
-
线程不调度:
- 确认调度器已启动
- 检查线程创建是否成功
-
堆栈溢出:
- 增加堆栈大小
- 优化递归函数
-
优先级反转:
- 使用互斥量优先级继承
- 重新设计任务优先级
10. 项目实战经验分享
在实际项目开发中,我总结了以下经验:
-
模块化设计:
- 将不同功能分配到独立线程
- 使用消息队列进行线程间通信
-
资源管理:
- 对共享资源使用互斥量保护
- 避免在中断中调用阻塞API
-
调试技巧:
- 使用ThreadX的Trace功能
- 定期输出系统状态
-
性能调优:
- 使用ThreadX的性能分析工具
- 优化关键路径代码
通过这个移植过程,ThreadX在STM32平台上表现出了优异的实时性和稳定性。其小巧的内核(最小配置仅2KB ROM)特别适合资源受限的嵌入式应用,而丰富的功能又能够满足复杂系统的需求。最重要的是,作为MIT许可的开源项目,它为企业提供了完全合法的商业使用方案。