
1. 项目概述与核心需求
去年接手了一个工业自动化项目,需要精确控制无刷直流电机(BLDC)的转速和转向。经过反复验证,最终基于STM32F103设计了一套闭环控制系统。这个方案不仅成本可控,而且通过霍尔传感器反馈实现了精准的转速调节,实测转速控制误差小于±2%。下面就把这个项目的完整实现过程分享给大家。
无刷直流电机因其高效率、长寿命等优势,在工业控制领域应用广泛。但相比有刷电机,其控制复杂度更高,需要精确的电子换相控制。本系统主要解决三个核心问题:
- 通过六步换向法实现电机基础驱动
- 利用霍尔传感器构建转速反馈闭环
- 基于uCOS-II实现多任务调度管理
2. 系统硬件设计详解
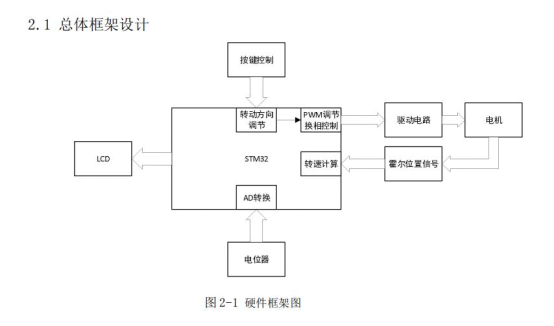
2.1 硬件架构设计
整个系统的硬件架构围绕STM32F103C8T6最小系统搭建,主要包含以下几个模块:
主控芯片选型考量:
- STM32F103C8T6具有丰富的外设资源,包括:
- 3个通用定时器(TIM2/3/4)
- 1个高级定时器(TIM1)
- 多达37个GPIO
- 12位ADC
- 72MHz主频足以满足实时控制需求
- 成本优势明显(约10元/片)
2.2 关键电路设计要点
2.2.1 电机驱动电路
采用L293D+IRF540的复合驱动方案:
- L293D负责逻辑电平转换
- IRF540作为功率开关管
重要提示:MOS管栅极必须加10kΩ下拉电阻,避免上电瞬间误触发
驱动电路参数计算:
- 电机额定电流I=2A
- IRF540导通电阻Rds(on)=44mΩ
- 功率损耗P=I²×Rds(on)=0.176W
- 需加装散热片确保温升可控
2.2.2 霍尔传感器接口
霍尔传感器输出信号处理电路:
code复制霍尔信号 → 10k上拉电阻 → 100nF滤波电容 → STM32 GPIO
信号调理要点:
- 上拉电压与STM32 IO电平匹配(3.3V)
- RC滤波时间常数τ=1ms(f=1kHz)
2.2.3 LCD显示模块
LCD1602与STM32连接方案:
code复制RS → PA0
RW → PA1
E → PA2
DB4-DB7 → PA4-PA7
实测发现:4位数据模式需特别注意初始化时序,建议延时增加20%
3. 软件系统实现
3.1 uCOS-II移植关键步骤
- 修改os_cpu.h中与Cortex-M3相关的定义:
c复制#define OS_CPU_CM3_NVIC_ST_CTRL (*((volatile INT32U *)0xE000E010))
#define OS_CPU_CM3_NVIC_PRIO_BITS 4
- 重写OS_CPU_SysTickHandler():
c复制void OS_CPU_SysTickHandler(void)
{
OS_CPU_SR cpu_sr;
OS_ENTER_CRITICAL();
OSIntNesting++;
OS_EXIT_CRITICAL();
OSTimeTick();
OSIntExit();
}
- 任务堆栈大小设置经验值:
- 电机控制任务:256字节
- 人机交互任务:128字节
- 系统监控任务:64字节
3.2 六步换相算法实现
霍尔信号与PWM输出映射表:
| 霍尔状态 | 导通相 | PWM通道 |
|---|---|---|
| 001 | V1-V2 | TIM1_CH1 |
| 010 | V3-V2 | TIM1_CH2 |
| 011 | V3-V4 | TIM1_CH3 |
| 100 | V5-V4 | TIM1_CH1 |
| 101 | V5-V6 | TIM1_CH2 |
| 110 | V1-V6 | TIM1_CH3 |
代码实现关键点:
c复制void Hall_Handler(uint8_t hall_state)
{
switch(hall_state){
case 0x01:
TIM1->CCR1 = duty_cycle;
TIM1->CCR2 = 0;
break;
// 其他状态处理...
}
}
3.3 转速闭环控制算法
转速控制采用增量式PID算法:
c复制typedef struct {
float Kp;
float Ki;
float Kd;
float error[2];
float output;
} PID_TypeDef;
void PID_Update(PID_TypeDef *pid, float target, float feedback)
{
float error = target - feedback;
float delta = pid->Kp*(error - pid->error[0])
+ pid->Ki*error
+ pid->Kd*(error - 2*pid->error[0] + pid->error[1]);
pid->output += delta;
pid->error[1] = pid->error[0];
pid->error[0] = error;
}
参数整定经验:
- 先调Kp至系统开始振荡
- 取振荡时Kp值的60%作为最终Kp
- Ki取Kp/10
- Kd取Kp*2
4. 系统调试与优化
4.1 常见问题排查指南
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 电机抖动不转 | 霍尔信号接反 | 交换任意两相霍尔线 |
| 转速波动大 | PID参数不当 | 重新整定Ki参数 |
| 电机发热严重 | 死区时间不足 | 调整TIM1->BDTR寄存器 |
| LCD显示乱码 | 初始化时序错误 | 增加20ms延时 |
4.2 实测性能数据
测试条件:24V电源供电,1000RPM目标转速
| 参数 | 实测值 |
|---|---|
| 稳态误差 | ±15RPM |
| 响应时间 | 0.8s |
| 电流波动 | ±0.3A |
4.3 关键优化措施
- 增加PWM死区时间:
c复制TIM1->BDTR |= (0x3F << 8); // 设置死区时间为1.5us
- 霍尔信号消抖处理:
c复制uint8_t Hall_GetState(void)
{
static uint8_t last_state;
uint8_t new_state = GPIO_ReadInputData(GPIOB) & 0x07;
if(new_state == last_state) return new_state;
else {
delay_us(100);
new_state = GPIO_ReadInputData(GPIOB) & 0x07;
last_state = new_state;
return new_state;
}
}
- 转速采样滑动平均滤波:
c复制#define FILTER_LEN 5
float Speed_Filter(float new_speed)
{
static float buffer[FILTER_LEN];
static uint8_t index = 0;
float sum = 0;
buffer[index++] = new_speed;
if(index >= FILTER_LEN) index = 0;
for(uint8_t i=0; i<FILTER_LEN; i++){
sum += buffer[i];
}
return sum/FILTER_LEN;
}
5. 项目总结与扩展建议
经过两周的调试优化,这套控制系统最终实现了设计指标。有几个特别值得注意的经验:
- 电机启动时需要特殊处理:
- 先施加50%占空比固定PWM
- 持续20ms等待霍尔信号稳定
- 再切入闭环控制模式
- 电位器转速设置建议:
c复制void ADC_Handler(void)
{
static uint16_t adc_buffer[10];
static uint8_t index = 0;
adc_buffer[index++] = ADC1->DR;
if(index >= 10) index = 0;
uint32_t sum = 0;
for(uint8_t i=0; i<10; i++){
sum += adc_buffer[i];
}
target_rpm = (sum/10) * 2000 / 4095; // 映射到0-2000RPM
}
- 系统扩展方向:
- 增加CAN总线接口实现多电机同步
- 加入位置闭环实现精准停控
- 开发上位机监控软件