
1. 项目概述
在车辆动力学控制领域,轮速跟踪是一个基础但至关重要的控制问题。作为一名从事车辆电控系统开发多年的工程师,我经常需要处理这类控制需求。今天要分享的是一种结合前馈控制和PID反馈控制的协同控制方法,这种方法在我们团队的实际项目中已经验证过其有效性。
轮速控制看似简单,但实际应用中会遇到各种挑战:路面状况变化导致的负载波动、轮胎打滑、传动系统延迟等。传统单一的控制方法往往难以兼顾响应速度和稳态精度。通过将基于模型的前馈控制与基于误差反馈的PID控制相结合,我们能够实现快速且精确的轮速跟踪。
2. 单轮模型建立
2.1 基础动力学方程
要设计有效的控制算法,首先需要建立准确的被控对象模型。对于单轮系统,我们主要考虑两个核心动力学方程:
车轮旋转方程:
这个方程描述了车轮旋转动力学,其中:
- I_y:车轮转动惯量
- ẇ:车轮角加速度
- T_t:驱动/制动力矩
- F_z:垂向载荷
- a:轮胎拖距(纵向力作用点与轮心垂向距离)
- F_x:纵向力
- r:车轮有效半径
车辆行驶方程:
这个方程将轮胎纵向力与车辆加速度联系起来,其中:
- m:车辆质量
- Vx:车辆纵向速度
2.2 模型简化与假设
在实际工程应用中,我们通常会对模型进行适当简化:
- 忽略轮胎动态特性,采用准静态轮胎模型
- 假设垂向载荷F_z在控制过程中保持恒定
- 不考虑传动系统柔性,假设力矩能瞬时传递到车轮
这些简化虽然会引入一定误差,但能大大降低控制算法复杂度。后续的反馈控制环节会补偿这些简化带来的误差。
3. 前馈控制设计
3.1 前馈控制原理
前馈控制是一种基于模型的开环控制策略,其核心思想是"预先计算"出达到目标所需的控制量。在轮速控制中,前馈控制需要计算两个分量:
- 加速分量:使轮速从当前值加速到目标值所需的力矩
- 稳态分量:维持目标轮速所需的力矩
前馈控制的优势在于其快速性,因为它不需要等待系统响应就能直接输出控制量。但缺点也很明显:完全依赖模型精度,对干扰和模型误差没有修正能力。
3.2 前馈力矩计算
加速分量计算:
这里dV_w/dt是我们期望的轮速变化率,通常根据车辆性能需求设定。例如,对于运动型车辆,这个值可以设得较大以实现快速加速;对于舒适型车辆,则可以设得较小以保证平顺性。
稳态分量计算:
这个分量需要估计车辆行驶阻力,包括空气阻力、滚动阻力等。在实际工程中,我们通常通过实验数据建立阻力-速度查表模型。
总前馈力矩:
3.3 前馈控制局限性
从我们的实验结果可以看到,纯前馈控制存在明显不足:
- 响应速度受模型精度限制,实际7s才达到目标值(预期1s)
- 稳态误差大,因为无法修正模型计算误差
- 抗干扰能力差,路面变化会直接影响控制效果
这些局限性正是我们需要引入反馈控制的原因。
4. PID反馈控制设计
4.1 PID控制原理
PID控制是最经典且广泛应用的反馈控制策略,它通过比例(P)、积分(I)、微分(D)三个环节对系统误差进行修正:
- 比例项:提供与误差成比例的快速响应
- 积分项:消除稳态误差
- 微分项:抑制超调,提高稳定性
在轮速控制中,我们通常采用增量式PID算法,其计算公式为:
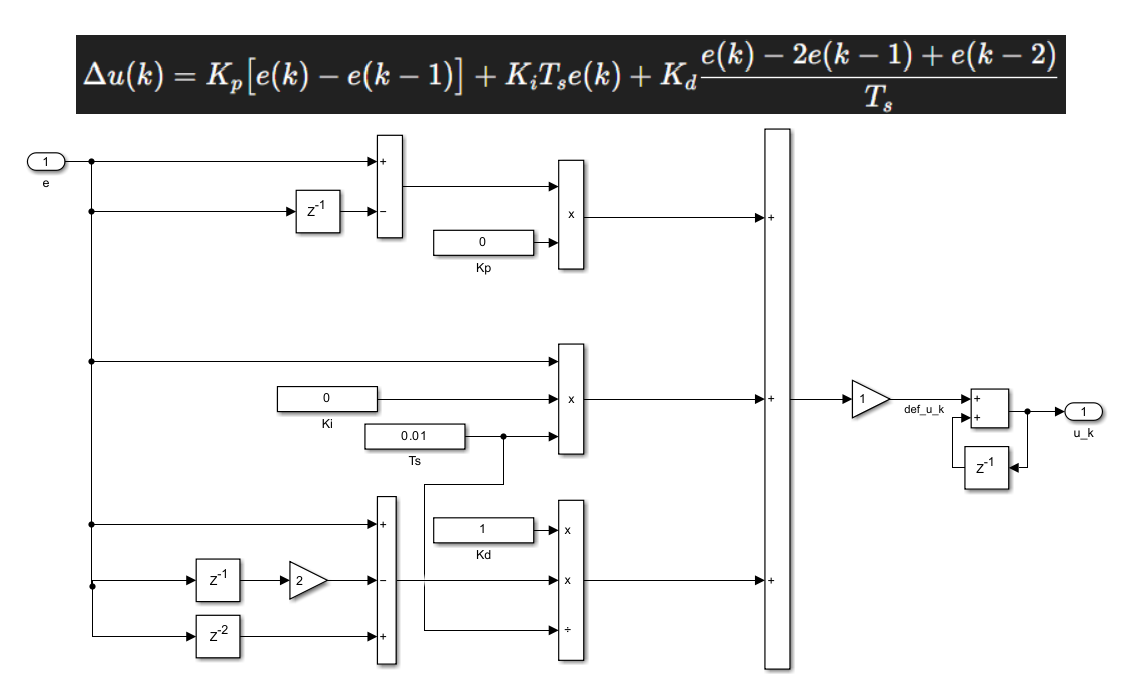
4.2 PID参数整定
PID控制的效果很大程度上取决于三个参数的整定。根据我们的工程经验,推荐以下整定步骤:
- 先调P参数:从小到大逐渐增加,直到系统出现轻微振荡
- 再调I参数:在P参数基础上加入I,消除稳态误差
- 最后调D参数:如果需要更快的响应且抑制超调,可加入少量D
参数大小关系通常为:I > P > D,且D值一般很小甚至可以为0。这是因为:
- 轮速控制系统本身有一定惯性,过大的D项容易放大噪声
- 积分项对消除稳态误差至关重要
- 比例项提供主要控制作用
4.3 PID控制优缺点
优点:
- 不依赖精确模型
- 能自动修正各种干扰和误差
- 实现简单,计算量小
缺点:
- 响应速度相对较慢
- 参数整定需要经验
- 对非线性系统效果有限
5. 前馈-反馈协同控制
5.1 协同控制架构
结合前馈和PID反馈的优势,我们采用如图所示的协同控制架构:
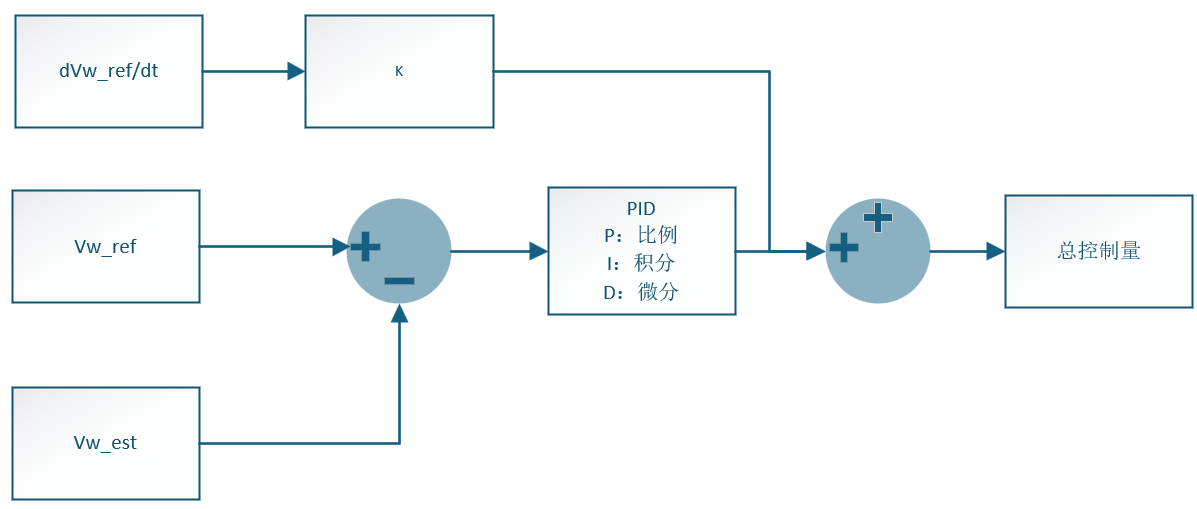
这种架构中:
- 前馈部分提供快速响应
- 反馈部分修正误差和干扰
- 两者输出相加作为最终控制量
5.2 调试方法与评价指标
协同控制的调试需要系统性的方法:
- 先单独调试PID反馈:按照前述方法整定PID参数
- 再加入前馈控制:调整前馈增益K,通常从0.5开始
- 综合评价指标:
我们定义了三个关键性能指标:
- t1:响应时间(从指令变化到达到目标值90%的时间)
- W:超调量(最大值超过目标值的百分比)
- t2:稳定时间(从指令变化到进入±2%稳态误差带的时间)
综合指标为:
权重系数k1、k2、k3根据应用需求设定。例如:
- 赛车控制:侧重t1(快速响应)
- 舒适型车辆:侧重W(低超调)
- 经济型车辆:可能侧重t2(快速稳定)
5.3 自动参数优化
在实际工程中,我们开发了自动参数优化程序:
- 定义参数搜索范围
- 在台架或实车上自动运行测试
- 记录各参数组合下的性能指标
- 选择综合指标最优的参数组合
这种方法不仅提高了调试效率,还能找到人工调试难以发现的最优参数。
6. 实验结果与分析
6.1 三种控制策略对比
我们进行了三种控制策略的对比实验:
-
纯前馈控制:
- 优点:结构简单
- 缺点:响应慢(7s达到目标),稳态误差大
- 适用场景:模型极其精确且无干扰的理想情况
-
纯PID控制:
- 优点:稳态精度高
- 缺点:响应速度中等(3s达到目标),可能有超调
- 适用场景:模型不确定但干扰不大的情况
-
前馈+PID协同控制:
- 优点:快速响应(1s达到目标),高稳态精度
- 缺点:调试复杂
- 适用场景:大多数实际应用
6.2 典型响应曲线
从实验结果曲线可以明显看出:
- 前馈+PID:快速无超调地跟踪目标
- 纯PID:较慢但有良好稳态精度
- 纯前馈:缓慢且不准确
7. 工程实践建议
基于我们团队的实际项目经验,分享一些重要的实践建议:
7.1 前馈模型精度提升
-
建立更精确的阻力模型:
- 通过滑行试验获取不同速度下的行驶阻力
- 考虑坡度、载重等影响因素
- 使用多项式或查表法建模
-
在线参数估计:
- 实时估计车辆质量、道路坡度等时变参数
- 自适应更新前馈模型
7.2 PID抗饱和处理
在实际系统中,执行机构(如电机、制动器)都有输出限制。当PID输出饱和时,积分项会持续累积(积分饱和),导致系统性能下降。解决方法:
-
积分抗饱和:
- 当输出饱和时停止积分
- 或采用积分分离策略(误差大时不积分)
-
输出限幅:
- 对PID输出进行合理限幅
- 考虑执行机构动态特性
7.3 采样周期选择
采样周期对数字控制性能影响很大:
-
一般原则:
- 轮速控制通常选择10-50ms采样周期
- 响应快的系统(如电机控制)需要更短周期
-
注意事项:
- 避免采样周期与控制算法计算时间太接近
- 保持采样周期稳定(使用硬件定时器)
7.4 信号处理
轮速信号通常来自轮速传感器,需要适当处理:
-
滤波处理:
- 低通滤波去除高频噪声
- 但会引入相位延迟,需折中考虑
-
故障检测:
- 检测传感器故障(如信号丢失、异常值)
- 设计容错控制策略
8. 扩展应用
本文介绍的方法虽然以轮速控制为例,但其原理可广泛应用于各种工业控制场景:
-
其他车辆控制系统:
- 发动机转速控制
- 转向系统控制
- 主动悬架控制
-
工业自动化:
- 电机位置/速度控制
- 温度控制
- 压力控制
-
机器人控制:
- 关节位置控制
- 末端执行器力控制
关键是根据具体应用特点调整前馈模型和PID参数,但基本架构和设计思路是相通的。