
1. ESTUN伺服系统与ESView软件概述
作为一名在工业自动化领域工作多年的工程师,我经常需要调试各种品牌的伺服系统。今天要分享的是ESTUN伺服驱动器配合ESView软件进行JOG(点动)操作的全过程解析。ESTUN作为国产伺服品牌的代表之一,其产品在性价比和本地化服务方面具有明显优势,特别适合中小型自动化项目使用。
ESView是ESTUN官方提供的伺服调试软件,功能类似于其他品牌的伺服调试工具(如安川的SigmaWin+、三菱的MR Configurator2),主要用于参数设置、状态监控和基础运动控制。与这些国际品牌相比,ESView的界面设计更符合国内工程师的操作习惯,但在功能完整性和稳定性上还有提升空间。
在实际项目中,JOG功能是最基础也最常用的调试手段之一。通过手动点动可以快速验证电机接线是否正确、负载是否正常、基本运动参数是否合理。很多新手工程师容易忽视这个看似简单的功能,但其实掌握好JOG操作能大幅提高调试效率。下面我就结合多年实战经验,详细讲解整个操作流程中的关键点和注意事项。
2. 硬件连接与软件配置
2.1 伺服系统物理连接
在开始软件操作前,首先要确保硬件连接正确。ESTUN伺服系统的标准连接包括:
- 电源接线:主回路电源(通常为三相220V)接入R/S/T端子
- 电机接线:U/V/W端子连接伺服电机动力线
- 编码器接线:使用专用编码器线缆连接电机编码器接口
- 通讯接口:通过USB或RS485连接电脑(推荐使用USB接口,稳定性更好)
重要提示:务必在断电状态下进行所有接线操作!我曾见过不止一位工程师带电插拔编码器接头导致编码器损坏的案例。伺服系统的编码器接口非常敏感,静电或误操作都可能导致永久性损坏。
2.2 ESView软件安装与连接
ESTUN官网提供ESView软件的下载,安装过程比较简单,但有几个关键点需要注意:
- 安装前关闭所有杀毒软件(某些版本会被误报为病毒)
- 安装完成后需要手动安装USB驱动(驱动文件通常随软件一起提供)
- 首次连接时,Windows可能会提示"设备未认证",需要手动选择"始终信任"
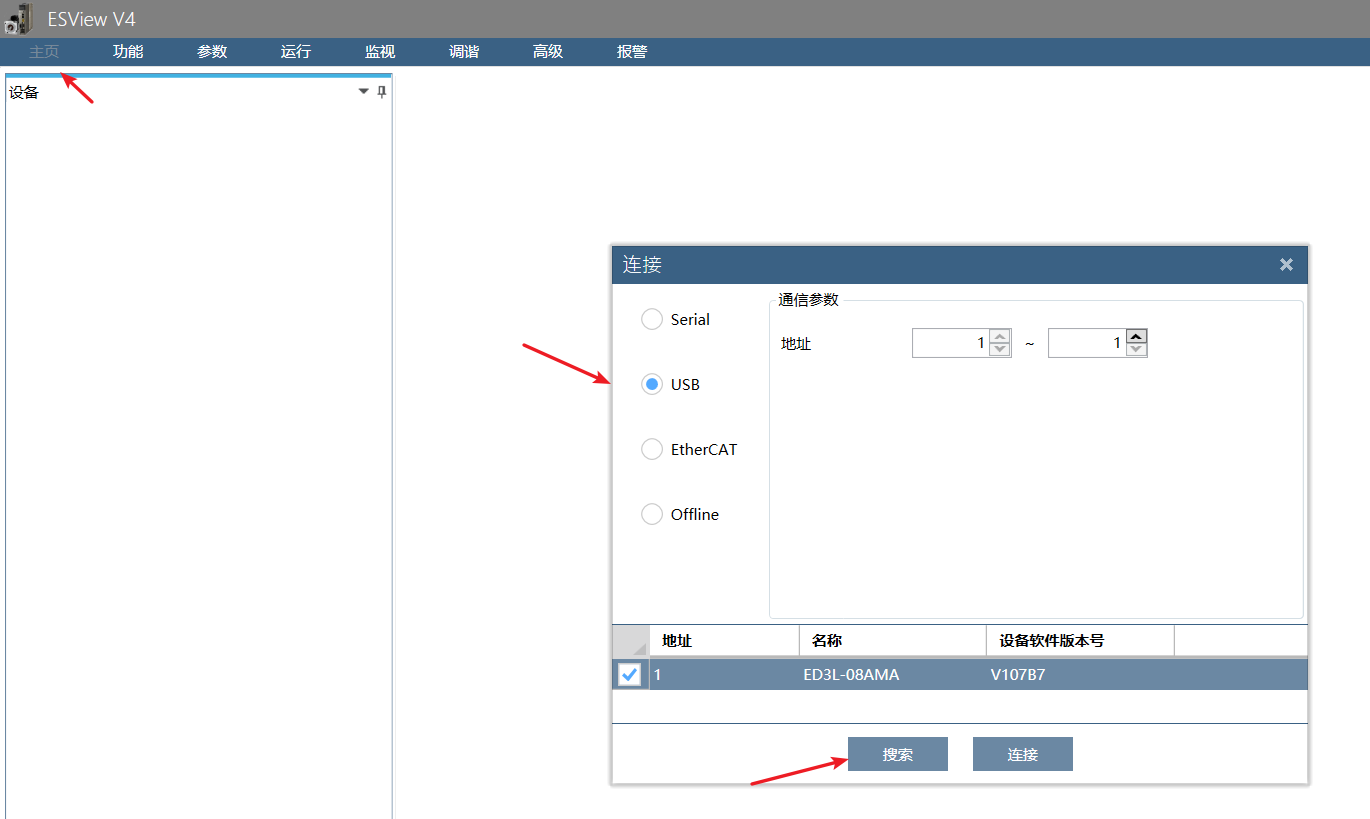
连接建立后,软件界面应显示如图1所示的连接状态。如果连接失败,建议按以下步骤排查:
- 检查USB线是否完好(换一根线试试)
- 尝试更换USB端口(优先使用主板原生USB接口)
- 重启电脑和伺服驱动器
3. 参数配置详解
3.1 基本参数设置
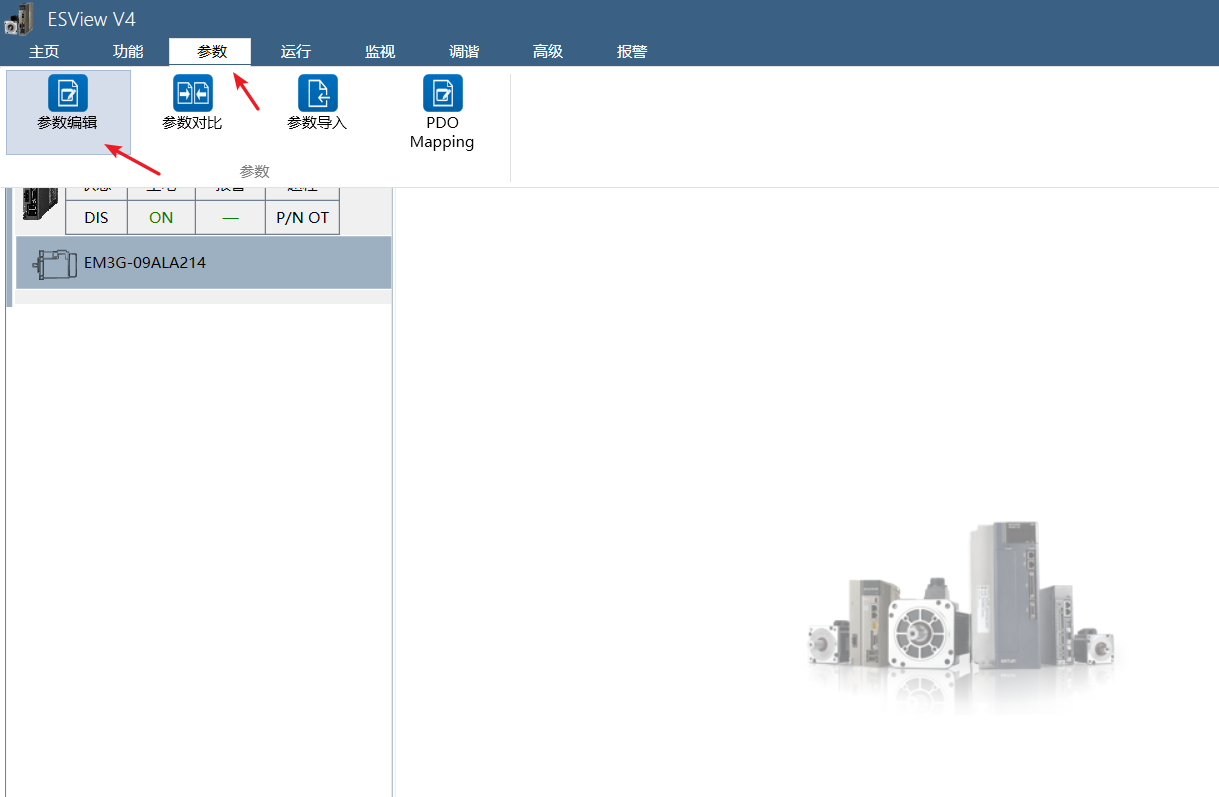
进入参数设置界面后(如图2所示),有几个关键参数需要特别关注:
-
控制模式选择(Pn000.0):
- 位置控制模式:适用于需要精确定位的场景
- 速度控制模式:适用于连续运转场景
- 转矩控制模式:适用于恒力输出场景
对于JOG测试,建议先选择"速度控制模式",这样更容易观察电机运转情况。
-
电机型号设置(Pn010):
必须与实际使用的电机型号完全一致,否则可能导致过流报警。我曾遇到过因为选错电机型号导致电机剧烈振动的案例,正确的型号匹配对系统稳定性至关重要。 -
电子齿轮比(Pn202/Pn203):
这个参数决定了指令脉冲与实际移动量的关系。计算公式为:code复制电子齿轮比 = (编码器分辨率 × 4) / (每转所需脉冲数)对于初试JOG操作,可以暂时设置为1:1,后续根据实际机械传动比再调整。
3.2 JOG专用参数配置
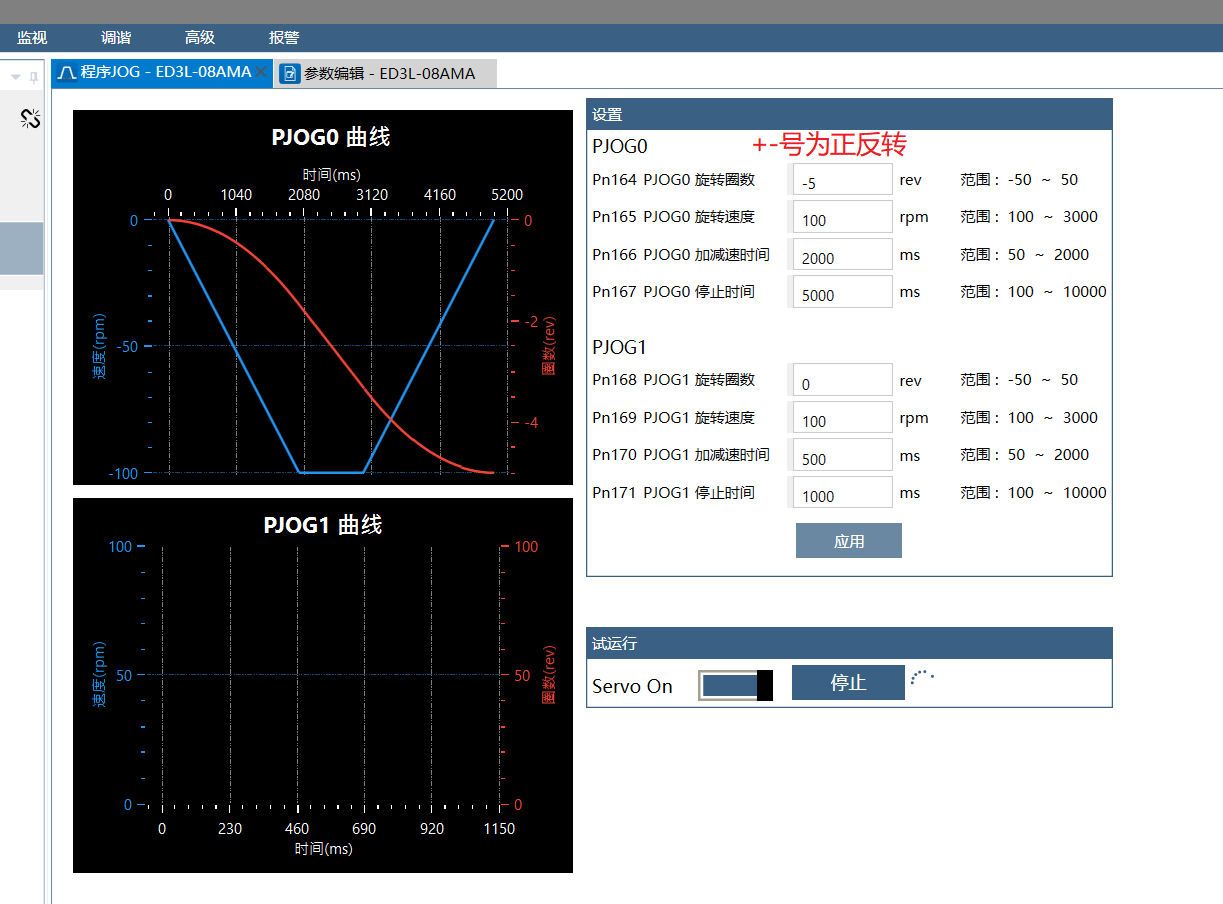
在JOG操作前,需要专门设置以下几组参数(如图3-5所示):


-
JOG速度(Pn506):
初次调试建议设置为100-300rpm,速度过高可能因惯性导致危险。对于大惯量负载,应该从更低速度开始测试。 -
加减速时间(Pn507/Pn508):
通常设置为100-500ms,太短的加速时间可能导致过载报警。对于垂直轴应用,需要更长的减速时间防止下滑。 -
转矩限制(Pn403/Pn404):
这是安全关键参数!建议初次设置为电机额定转矩的50%,确认运转正常后再逐步提高。我曾经调试过一个搬运机械手项目,因为转矩限制设置不当导致机械臂突然快速下落,差点造成设备损坏。
4. JOG操作实战步骤
4.1 基本JOG操作
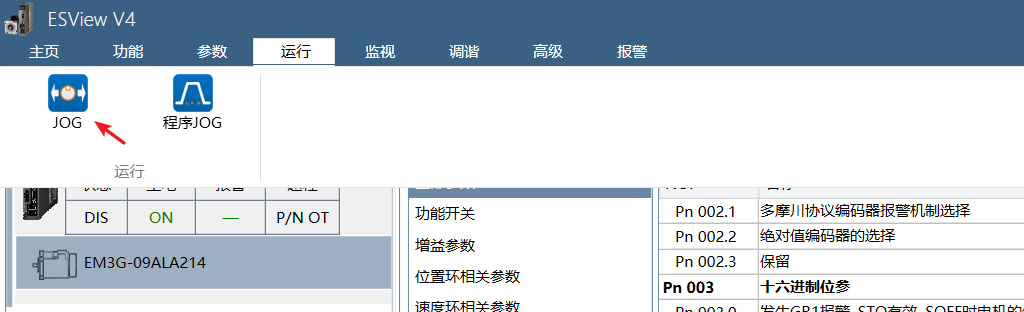
进入JOG操作界面(如图6所示),界面主要分为三个区域:
- 状态显示区:显示当前速度、位置、报警等信息
- 控制按钮区:正转/反转JOG按钮
- 参数设置区:可实时调整JOG速度和加减速时间

操作流程:
- 点击"伺服ON"按钮使能驱动器(听到电机"咔嗒"一声表示使能成功)
- 设置适当的JOG速度和加减速时间
- 按住"正转"或"反转"按钮进行点动操作
- 观察电机运转方向和实际转向是否一致
- 检查是否有异常振动或噪音
实用技巧:在进行JOG操作时,建议一只手放在急停按钮上随时准备停机。我习惯在第一次JOG时只让电机转动1/4圈就立即停止,确认无误后再进行连续运转。
4.2 高级JOG功能
对于需要更精确控制的场景,ESView还提供了一些高级JOG功能:
- 点动距离控制(如图7所示):
可以设置每次点动的固定位移量,非常适合需要精确定位的调试场景。比如在调整机械限位时,可以设置为每次移动1mm,方便微调。

-
示波器功能:
可以实时捕获速度、位置、电流等参数的波形,帮助分析运动过程中的异常情况。这个功能在排查抖动、过冲等问题时特别有用。 -
参数实时调整:
在JOG过程中可以动态修改速度、加速度等参数,立即观察参数变化对运动特性的影响。这个实时调参功能是ESView相比其他品牌软件的一个亮点。
5. 常见问题排查与解决
5.1 典型报警处理
在JOG操作过程中,最常见的几种报警及解决方法:
-
AL-10 过电流报警:
- 检查电机相序是否正确(U/V/W接线)
- 检查编码器接线是否松动
- 降低转矩限制值
-
AL-20 过电压报警:
- 检查电源电压是否稳定
- 适当增加减速时间
- 考虑外加制动电阻
-
AL-30 编码器异常:
- 重新插拔编码器接头
- 检查编码器线缆是否受损
- 确认编码器类型参数设置正确
5.2 JOG操作中的异常现象
-
电机不转但无报警:
- 检查伺服使能信号是否有效
- 确认控制模式设置正确
- 检查JOG速度是否设置过低(<10rpm可能无法启动)
-
电机振动严重:
- 检查机械连接是否牢固
- 调整速度环增益参数(Pn100系列)
- 尝试启用陷波滤波器功能
-
停止时位置偏移:
- 检查制动器是否正常释放
- 调整位置环增益(Pn200系列)
- 对于垂直轴,考虑增加电气制动功能
6. 高级用户实用技巧
6.1 参数备份与恢复
在"高级用户"界面(如图8-9所示),可以进行完整的参数备份:
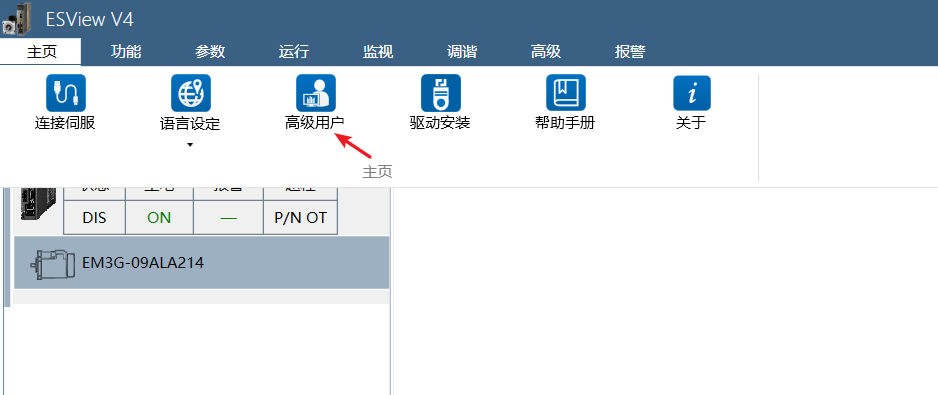
建议在每次成功调试后都备份参数,保存为带有日期和项目名称的文件。我个人的参数管理习惯是:
- 初始参数备份:文件名为"型号_初始参数_日期"
- 调试完成备份:文件名为"项目名称_最终参数_日期"
- 重大修改前备份:文件名为"项目名称_修改前_修改内容_日期"
6.2 性能优化建议
-
振动抑制:
- 使用自适应陷波滤波器(Pn530-Pn533)
- 调整速度环积分时间(Pn105)
- 对于刚性较低的机械结构,适当降低刚性设置(Pn102)
-
响应性提升:
- 在允许范围内提高速度环比例增益(Pn100)
- 优化前馈补偿参数(Pn210-Pn213)
- 对于频繁启停的应用,缩短加减速时间但要配合转矩限制
-
节能设置:
- 启用自动节能模式(Pn416)
- 调整待机电流(Pn417)
- 对于间歇性工作负载,设置自动断电时间(Pn418)
在实际项目中,我发现ESTUN伺服通过合理调参后,性能可以接近日系中端产品的水平。特别是在一些对成本敏感但又需要一定性能的场合,ESTUN是一个不错的选择。不过要注意的是,不同型号的固件版本可能存在差异,建议定期检查官网的固件更新。