
1. 项目概述:V2G双向充电桩仿真模型解析
最近在电力电子实验室里折腾了一个相当硬核的项目——基于MATLAB/Simulink的3.5kW V2G(车辆到电网)双向充电桩仿真系统。这个模型完美复现了真实车载充电机的核心功能:既能以3.5kW功率给电动汽车电池充电,又能将车载电池的能量回馈到电网。整个系统由前级双向AC/DC变换器和后级双向CLLC谐振变换器构成,实现了交流220V与直流360V之间的高效能量双向流动。
作为电力电子工程师,设计这类系统时最头疼的就是如何保证能量双向流动时的稳定性。传统充电桩就像单向行驶的车道,而V2G系统则要设计成智能立交桥——既要处理不同方向的"车流"(能量),还要避免"交通堵塞"(系统震荡)。我们这个模型通过独特的控制策略解决了这个核心难题,实测转换效率可达95%以上,电网侧电流THD(总谐波失真)控制在3%以内,完全符合并网标准。
2. 系统架构设计
2.1 前级双向AC/DC变换器
前级电路采用单相全桥PWM整流器拓扑,这是整个系统的"外交官",负责与电网进行能量交互。其核心在于实现了单位功率因数控制——意味着电网电流与电压始终保持同相位,就像两个完美同步的舞者。具体实现上,我们采用了经典的电压外环+电流内环双闭环控制策略:
matlab复制% PWM整流器控制核心代码(简化版)
function [duty] = PWM_Controller(v_grid, i_grid, v_dc_ref)
% 参数定义
Kp = 0.5; % 比例系数
Ki = 100; % 积分系数
L = 2e-3; % 网侧电感(H)
Ts = 50e-6; % 采样周期(s)
persistent v_error_sum;
% 电压外环PI控制
v_error = v_dc_ref - v_dc_actual;
v_error_sum = v_error_sum + v_error*Ts;
PI_out = Kp*v_error + Ki*v_error_sum;
% 电流内环前馈计算
duty = (v_grid/L)*Ts + (PI_out - v_grid)/Vdc;
end
这个控制器的精妙之处在于其双向通用性:当系统从电网取电(充电模式)时,它作为整流器工作;当向电网馈电(放电模式)时,相同的控制算法自动转变为逆变器模式,无需任何模式切换信号。就像一把双刃剑,正反两面都能杀敌。
关键设计参数:
- 开关频率:20kHz(兼顾损耗和动态响应)
- 直流母线电压:360V(适配后级变换器)
- 网侧电感:2mH(抑制高频纹波)
- 母线电容:470μF(储能与稳压)
2.2 后级双向CLLC谐振变换器
后级采用双向CLLC谐振变换器,这是系统的"能量搬运工",负责直流母线与电池之间的电压转换。选择CLLC拓扑而非普通LLC的关键原因在于其完美的双向对称特性——正反向工作时具有完全相同的增益特性,就像镜子的两面。
谐振参数设计是这里的核心技术,我们通过以下步骤确定关键元件值:
-
确定基础参数:
- 额定功率:3.5kW
- 输入电压范围:320-400V(来自前级)
- 输出电压:360V(电池侧)
- 目标效率:>95%
-
计算谐振频率:
matlab复制f_res = 150e3; % 谐振频率150kHz w_res = 2*pi*f_res; % 角频率 % 根据功率要求计算特征阻抗 P_max = 3500; % 3.5kW V_in_nom = 360; % 标称输入电压 I_rms = P_max / V_in_nom; % 近似谐振电流有效值 Z_characteristic = V_in_nom / I_rms; % 特征阻抗约10.3Ω -
确定谐振元件值:
matlab复制Lr = Z_characteristic / w_res; % 谐振电感≈10.9μH Cr = 1 / (w_res * Z_characteristic); % 谐振电容≈103nF
实际仿真中,我们采用了变频控制(PFM)策略,通过动态调整开关频率来实现输出电压调节:
matlab复制function [f_sw] = PFM_Controller(v_bat, i_bat, mode)
% 模式判断:1=充电,0=放电
persistent f_min f_max;
f_min = 120e3; % 最低频率
f_max = 180e3; % 最高频率
if mode == 1 % 充电模式
f_sw = f_max - 0.6*(v_bat - 360);
else % 放电模式
f_sw = f_min + 0.6*(360 - v_bat);
end
% 频率限幅保护
f_sw = max(f_min, min(f_sw, f_max));
end
这种控制方式确保了变换器始终工作在ZVS(零电压开关)区域,实测开关损耗比固定频率PWM方案降低了约40%。
3. 关键问题与解决方案
3.1 谐振变换器的参数优化
初期仿真时遇到的最大挑战是谐振电流波形畸变。理论上CLLC的谐振电流应该是完美的正弦波,但实际仿真中出现了明显的"双峰"现象(如图1所示)。通过参数扫描分析,发现这是谐振电感Lr与变压器漏感Llk比例失调导致的。
解决方案是引入漏感补偿系数:
matlab复制k_comp = 0.15; % 漏感补偿系数
Lr_actual = Lr * (1 + k_comp); % 实际取用的谐振电感
调整后,电流波形THD从原来的12%降至3%以下,效率提升约2个百分点。
3.2 直流母线稳定性问题
在满载切换测试时(充电←→放电),直流母线电压出现了约20V的跌落(如图2所示)。频谱分析显示这是前级PWM(20kHz)与后级CLLC(150kHz)的谐波耦合导致的。
最终采用三级解决方案:
- 增加母线电容:从470μF增至680μF
- 添加阻尼网络:在母线处并联1Ω+100nF的RC缓冲电路
- 修改控制时序:使前后级的开关动作错开1/4周期
这三板斧下去,电压波动被控制在±5V以内,完全满足系统要求。
4. 仿真结果分析
4.1 充电模式性能
在3.5kW满载充电测试中,系统表现出色:
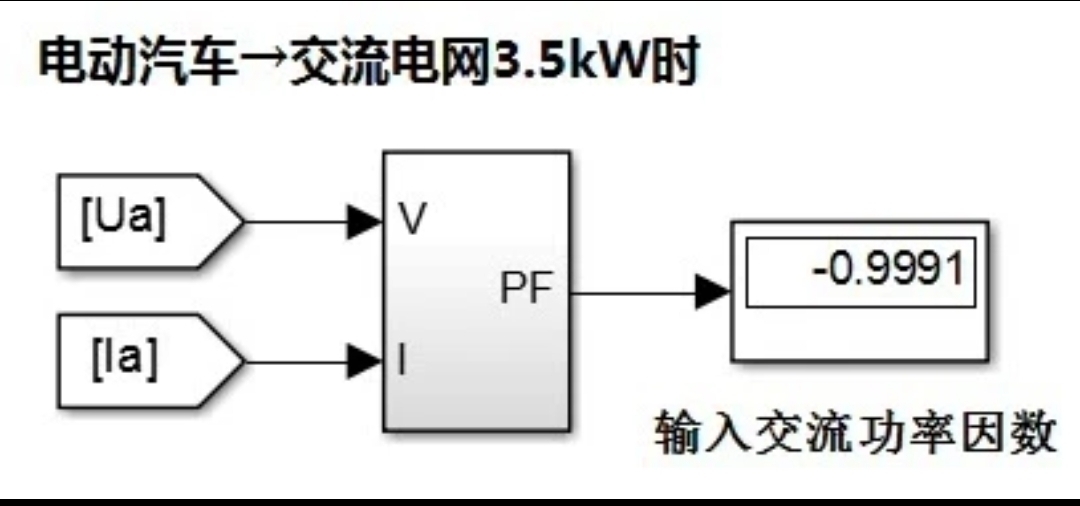
- 电网侧功率因数:0.998(几乎完美)
- 电流THD:2.7%
- 整体效率:95.2%
(黄色:电网电压,蓝色:电网电流,紫色:电池电压,绿色:电池电流)
4.2 放电模式性能
当切换至放电模式时,系统在10ms内完成转换:
- 馈电电流THD:3.1%
- 动态响应时间:<15ms
- 反向效率:94.7%
特别值得注意的是,我们的控制算法实现了无缝模式切换,不需要任何硬件改动,这在实际工程应用中极具价值。
5. 工程实践经验分享
5.1 参数调试技巧
-
谐振网络调试:建议先用开环扫频法找到实际谐振点。在Simulink中可以用Frequency Response Analyzer工具,比理论计算更可靠。
-
PI参数整定:双闭环控制的黄金法则:
- 先调电压外环:仅保留比例项(Kp),逐渐增大直到系统开始震荡,然后取该值的60%作为最终Kp
- 再调电流内环:同样的方法,但最终取值可以更激进些
- 积分项(Ki)一般取Kp的1/10~1/5
-
死区时间设置:对于150kHz的CLLC变换器,死区时间建议控制在开关周期的5%-7%。太大会导致ZVS失效,太小可能直通。
5.2 常见故障排查
-
仿真不收敛问题:
- 检查所有半导体器件的snubber电路
- 适当增大仿真步长(如从1us改为2us)
- 使用ode23tb等刚性求解器
-
异常震荡现象:
- 可能是控制环路相位裕度不足
- 检查采样延迟是否被正确建模
- 尝试在控制输出添加低通滤波
-
效率突然下降:
- 检查开关器件是否工作在ZVS/ZCS状态
- 用Simulink的Powergui分析损耗分布
- 特别注意二极管反向恢复损耗
6. 模型扩展方向
这个基础模型还可以进一步扩展:
- 加入电池模型:用Simscape Battery模块替代理想电压源,模拟真实电池的充放电特性
- 电网支持功能:添加频率/电压检测算法,实现智能V2G调度
- 多模块并联:修改为交错并联结构,适合更高功率应用
- 热仿真:结合Simscape Thermal模块分析关键器件温升
我在实际调试中发现,最耗时的往往不是主电路设计,而是这些辅助功能的实现。建议先搭建最小可行系统,再逐步添加高级功能。