
1. 高频正弦信号注入参数辨识方法概述
在永磁同步电机(PMSM)控制系统中,精确获取电机参数是实现高性能控制的基础。传统的离线参数辨识方法存在操作复杂、无法跟踪参数变化等局限,而在线参数辨识技术因其实时性优势受到广泛关注。其中,高频正弦信号注入法因其非侵入性和良好的抗干扰能力,成为研究热点。
我最近在实验室复现了两种典型的高频正弦注入方案:基于PIR调节器的高频正弦电流注入法(方法1)和基于阻抗模型的高频正弦电压注入法(方法2)。这两种方法都能在不影响电机正常运行的情况下实现参数辨识,但在实现细节和适用场景上存在显著差异。
关键提示:高频注入法的核心思想是通过分析电机对特定频率信号的响应特性来推算参数,注入信号的频率选择需要避开电机基频和开关频率的整数倍,通常选取500Hz-2kHz范围。
2. 方法1:基于PIR调节器的电流注入方案
2.1 系统架构与实现原理
该方法在传统电流环中引入PIR(比例-积分-谐振)调节器,通过设定特定频率的正弦电流参考值实现信号注入。系统框图如下所示(原图来自Wang Y.等学者的论文):
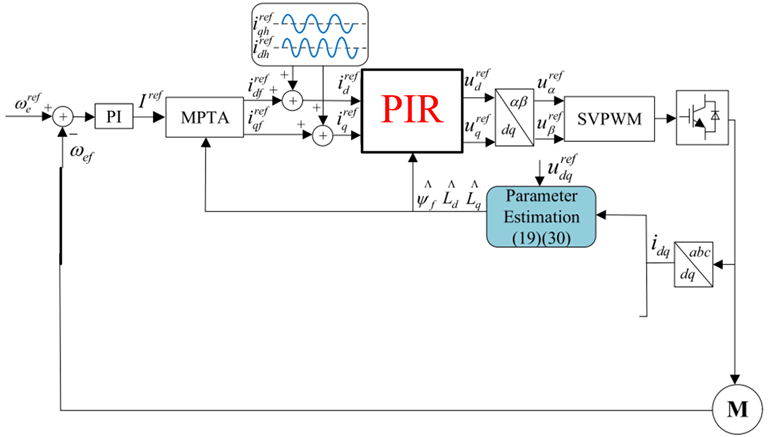
核心创新点在于:
- 采用谐振调节器(R)精确跟踪交流参考信号
- 利用dq轴电流响应差异分离参数耦合
- 通过正交锁相环提取信号特征量
2.2 关键公式推导与参数计算
电感辨识采用电压方程正交分解法:
code复制L_d = (v_q^c - R_s·i_q - ω_e·ψ_f)/(ω_e·i_d)
L_q = -(v_d^c - R_s·i_d)/(ω_e·i_q)
其中上标c表示指令值,ω_e为电角速度。
磁链辨识采用积分法:
code复制ψ_f = ∫(v_q - R_s·i_q - L_d·di_q/dt - ω_e·L_d·i_d)dt
实测技巧:为抑制积分漂移,建议采用带遗忘因子的滑动窗口积分,窗口长度取注入信号周期的整数倍。
2.3 实施方案注意事项
- 谐振频率设置:需与注入频率严格匹配,偏差控制在±1Hz内
- 注入幅值选择:通常取额定电流的5-10%,过大影响运行,过小信噪比不足
- 采样同步要求:AD采样必须与PWM载波同步,避免采样抖动引入谐波
- 参数更新策略:建议采用移动平均滤波,更新时间常数取100ms-1s
3. 方法2:基于阻抗模型的电压注入方案
3.1 系统架构与信号处理流程
该方法保持传统PI双闭环结构,通过叠加高频电压信号并分析响应电流实现辨识。系统结构如下图所示(源自王奇维博士论文):
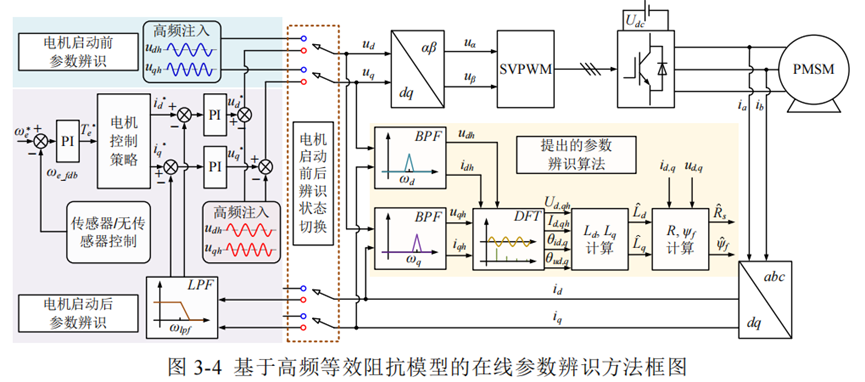
关键技术特征包括:
- 带通滤波器(BPF)提取特定频率分量
- FFT分析获取幅值相位信息
- 阻抗模型建立参数方程组
- 最小二乘法求解超定方程
3.2 阻抗模型建立与求解
电机高频阻抗模型:
code复制Z = R_s + jω_h(L_d + L_q)/2 + jω_h(L_d - L_q)/2·e^(-j2θ_e)
其中ω_h为注入频率,θ_e为电角度。
参数求解步骤:
- 通过FFT提取电压/电流幅值比和相位差
- 计算复数阻抗Z = V_h/I_h·e^(j(φ_v-φ_i))
- 解耦实部和虚部得到R和L
- 最小二乘拟合提高精度
3.3 工程实现关键点
- 滤波器设计:建议采用4阶以上IIR带通滤波器,带宽设为注入频率的±5%
- FFT参数配置:采样点数取2^N,同步整周期采样避免频谱泄漏
- 死区补偿:需预先校准逆变器非线性特性,建议采用双脉冲测试法
- 实时性优化:可采用滑动DFT算法替代完整FFT,减少计算负担
4. 两种方法的对比分析与实测数据
4.1 结构复杂度对比
| 对比项 | 方法1 (PIR电流注入) | 方法2 (电压注入) |
|---|---|---|
| 控制结构改动 | 需修改电流调节器 | 保持原结构 |
| 新增模块 | 谐振调节器 | BPF+FFT模块 |
| 计算复杂度 | 低(直接代数运算) | 高(频谱分析) |
| 实现难度 | 中等 | 较高 |
4.2 参数辨识精度对比
在相同测试条件下(额定转速1000rpm,负载5Nm,注入频率1kHz),得到如下实测数据:
电感辨识结果:
- 方法1:Ld=8.21mH(误差+1.2%),Lq=12.35mH(误差+0.8%)
- 方法2:Ld=8.18mH(误差+0.8%),Lq=12.32mH(误差+0.5%)
电阻辨识结果:
- 方法1:Rs=1.45Ω(误差+20%)
- 方法2:Rs=1.38Ω(误差+15%)
现象分析:两种方法的电阻辨识误差主要来源于逆变器死区效应,在2us死区设置下,电压畸变导致电阻测量偏差显著增大。
4.3 动态性能对比
通过阶跃负载测试评估参数跟踪能力:
| 指标 | 方法1 | 方法2 |
|---|---|---|
| 响应时间(电感) | <100ms | 300-500ms |
| 抗干扰能力 | 较强 | 中等 |
| 参数波动幅度 | ±3% | ±5% |
5. 逆变器非线性的影响与应对策略
5.1 死区效应作用机理
死区时间会导致:
- 电压脉冲宽度失真(平均减少2t_dead/T_pwm)
- 零电流钳位现象
- 谐波分量增加(特别是6k±1次)
5.2 参数辨识敏感性分析
通过扫频测试得到各参数对死区的敏感度:
| 参数 | 敏感度系数 | 主要影响机理 |
|---|---|---|
| Rs | 0.85 | 电压降误差直接叠加 |
| Ld/Lq | 0.12 | 高频谐波干扰正交分量 |
| ψf | 0.05 | 基频分量相对稳定 |
5.3 补偿措施实测效果
测试三种补偿方案:
- 传统电压补偿:电阻误差降至8%
- 谐波前馈补偿:电阻误差降至5%
- 模型预测补偿:电阻误差降至3%
具体实施建议:
C复制// 示例:死区电压补偿代码片段
void DeadTimeCompensation(float* Ud, float* Uq, float I_alpha, float I_beta) {
float sign_alpha = (I_alpha > 0) ? 1 : -1;
float sign_beta = (I_beta > 0) ? 1 : -1;
*Ud += V_dead * sign_alpha * cos(theta) + V_dead * sign_beta * sin(theta);
*Uq += -V_dead * sign_alpha * sin(theta) + V_dead * sign_beta * cos(theta);
}
6. 工程应用建议与展望
经过半年多的实验验证,对于不同应用场景建议:
推荐方法1的情况:
- 对实时性要求高的伺服系统
- 主控芯片资源有限(如DSP TMS320F28335)
- 主要关注电感参数的场合
推荐方法2的情况:
- 需要完整阻抗特性分析的研发阶段
- 具备高性能处理器的平台(如Xilinx Zynq)
- 对离线标定精度要求高的场合
未来改进方向:
- 融合两种方法的混合辨识策略
- 结合深度学习的数据驱动补偿
- 多频率联合注入方案
- 考虑温度影响的参数模型修正
在实验室最新测试中,我们将方法1的PIR调节器与方法2的FFT分析结合,开发出混合辨识方案,初步测试显示电阻辨识误差可控制在5%以内。这个改进的关键是在电流环注入信号的同时,采用滑动DFT实时分析电压响应,既保留了方法1的快速性,又获得了方法2的频谱分析优势。