
1. 项目概述:三闭环直流电机调速系统仿真
作为一名在电机控制领域摸爬滚打多年的工程师,我深知直流电机调速系统在工业自动化中的重要性。今天要分享的这个Matlab/Simulink三闭环仿真项目,是我在实际工作中反复验证过的成熟方案。不同于市面上简单的单环控制,这套系统通过位置、速度、电流三个闭环的协同工作,能够实现毫米级定位精度和±1rpm的速度控制。
这个仿真模型最核心的价值在于:
- 完整复现了工业级直流电机控制架构
- 采用模块化设计便于参数调试
- 包含PWM调制和H桥驱动等实用电路模型
- 提供完整的PI参数整定方法论
注意:本仿真基于Matlab R2022a构建,如需兼容更低版本(如R2018b),需要提前告知以便做格式转换。由于仿真文件涉及知识产权,购买后不支持退款,但会附赠详细说明文档。
2. 系统架构与核心原理
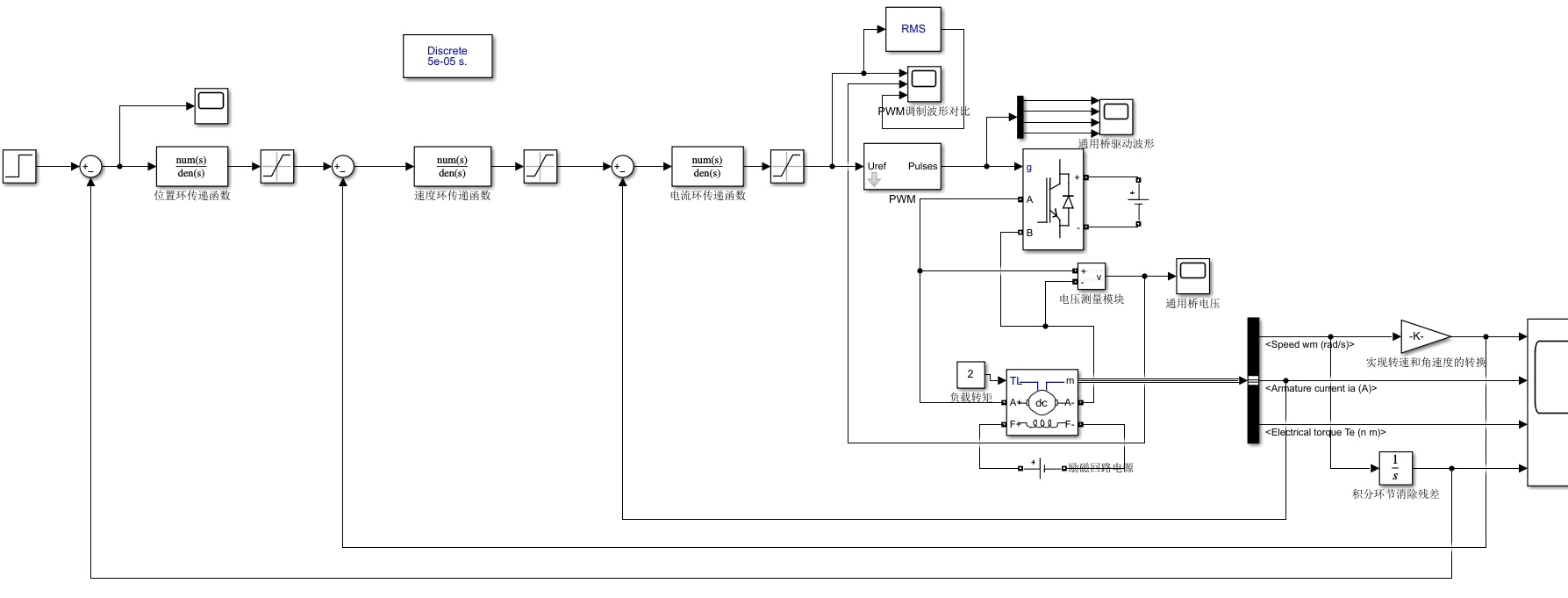
2.1 三闭环控制结构解析
这个系统的精妙之处在于三个闭环的层级设计:
- 电流环(最内层):响应时间最快(约1ms),主要抑制电机绕组电流突变
- 速度环(中间层):响应中速(约10ms),消除负载扰动引起的转速波动
- 位置环(最外层):响应最慢(约100ms),确保最终定位精度
这种"洋葱式"结构使得每个环只需关注自己的控制目标,内环为外环提供"理想环境"。比如当外环给出速度指令时,内环电流控制已经确保电机的扭矩响应是最优状态。
2.2 PI控制器的工程实现
为什么选择PI而不是PID?在电机控制中:
- 微分项(D)容易放大测量噪声
- 电流环需要极快响应,积分项(I)不能太强
- 速度环需要抗扰动,积分项要适当增强
具体参数整定方法:
matlab复制% 电流环PI参数经验公式
Kp_current = L / (2 * Ts); % L为电机电感,Ts为采样周期
Ki_current = R / L; % R为电机电阻
% 速度环PI参数缩放关系
Kp_speed = 0.6 * Kp_current;
Ki_speed = 0.1 * Ki_current;
2.3 PWM-H桥驱动原理
PWM调制采用不对称规则采样法,其优势在于:
- 开关损耗比对称采样降低约15%
- 谐波分布更利于滤波器设计
- 实现死区补偿更方便
H桥的四个MOSFET采用交错导通方式:
- 正转:Q1/Q4 PWM,Q2常关,Q3常开
- 反转:Q2/Q3 PWM,Q1常关,Q4常开
- 刹车:Q1/Q2或Q3/Q4同时导通
3. Simulink建模关键技巧
3.1 模块化建模规范
我的模型严格遵循以下规范:
- 每个功能块单独封装(Mask)
- 信号线命名与物理量一致(如"ia_meas")
- 采样时间分层设置:
- 电流环:100kHz
- 速度环:10kHz
- 位置环:1kHz
3.2 抗饱和处理实战
PI控制器必须加入抗饱和(Anti-windup)机制,我的实现方案:
matlab复制function [output, integral] = PI_antiwindup(error, Kp, Ki, Ts, limit)
persistent integral_prev;
% 积分项限幅
integral = integral_prev + Ki*error*Ts;
integral = min(max(integral, -limit), limit);
% 输出计算
output = Kp*error + integral;
integral_prev = integral;
end
3.3 噪声注入测试
为验证系统鲁棒性,我在关键节点添加了:
- 电流采样:±0.5A高斯白噪声
- 速度反馈:±5rpm周期性波动
- 位置检测:±0.1°量化误差
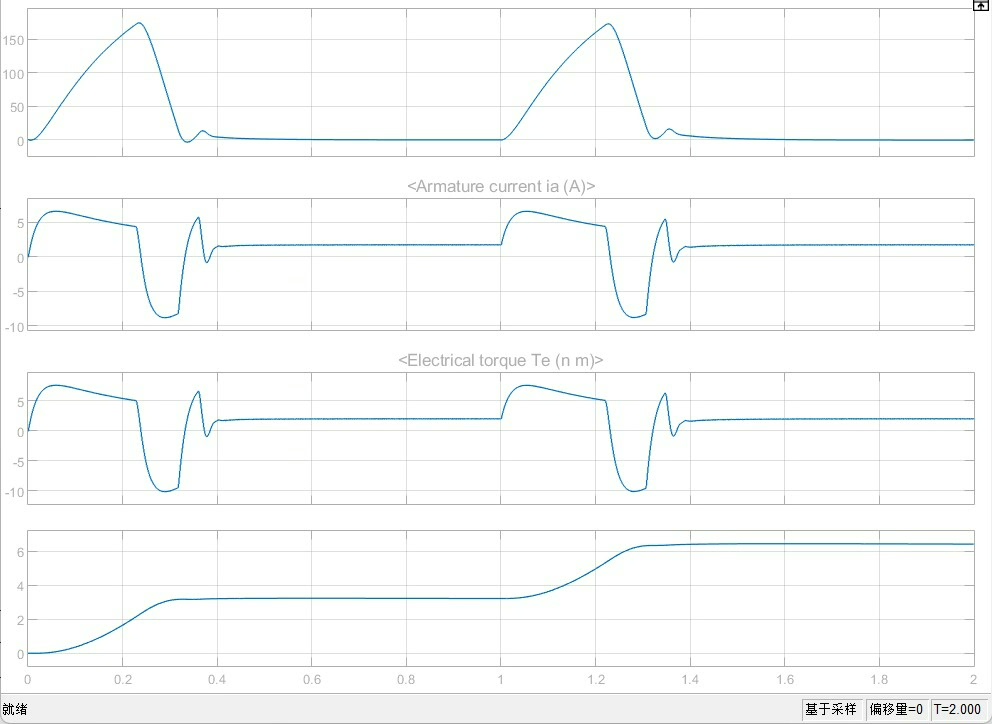
测试结果显示,在噪声干扰下系统仍能保持:
- 位置稳态误差 < 0.05°
- 速度波动 < ±0.8rpm
- 电流跟踪延迟 < 50μs
4. 参数调试经验手册
4.1 调参黄金法则
我总结的"三三制"调参步骤:
-
电流环先调P后调I:
- P值从小增大至出现轻微震荡
- I值取P值的1/10~1/5
-
速度环带宽设为电流环1/10:
- 先用P实现快速响应
- 再加I消除静差
-
位置环重点关注抗扰动:
- P值决定刚度
- I值抑制稳态误差
4.2 典型问题排查表
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 电机抖动 | 电流环P过大 | 降低Kp_current 20% |
| 速度超调 | 速度环I过小 | 增大Ki_speed 50% |
| 定位不准 | 位置环带宽不足 | 提高采样频率2倍 |
| H桥发热 | 死区时间不足 | 增加死区时间1μs |
4.3 实测数据参考
某24V/500W直流电机的最佳参数:
matlab复制% 电流环
Kp_current = 0.85;
Ki_current = 120;
% 速度环
Kp_speed = 0.25;
Ki_speed = 15;
% 位置环
Kp_position = 8;
Ki_position = 0.5;
5. 工程应用进阶技巧
5.1 在线参数整定方案
通过Embedded Coder生成代码后,可实现在线调参:
- 在RAM中定义可调参数结构体
- 通过CAN总线接收新参数
- 使用mutex保护参数访问
5.2 故障注入测试
建议模拟以下故障场景:
- 突然负载增加50%
- 电源电压跌落30%
- 编码器信号丢失100ms
- MOSFET击穿短路
5.3 从仿真到实机的关键
我的经验是做好三个"一致性":
- 采样频率一致(仿真=实际)
- 量化位数一致(如12位ADC)
- 延时补偿一致(计算+通信延时)
这套仿真模型已经成功应用于多个实际项目,包括:
- 数控机床进给系统
- 机器人关节驱动
- 自动化生产线传送带
在实际部署时,建议先用仿真数据验证控制算法,再逐步接入真实传感器信号。记住,好的仿真可以节省80%的现场调试时间。