永磁同步电机死区效应补偿与Simulink仿真实践

1. 项目概述
在工业驱动和电动汽车领域,永磁同步电机(PMSM)因其高效率、高功率密度和优异的动态性能而备受青睐。作为一名从事电机控制多年的工程师,我经常遇到逆变器死区效应带来的棘手问题——它就像电路中的"隐形杀手",悄无声息地破坏着系统的性能表现。今天我要分享的,就是如何通过线性死区补偿技术来驯服这个"杀手"。
磁场定向控制(FOC)虽然是当前PMSM控制的主流策略,但实际应用中我们总会发现:明明仿真完美的系统,一上实物就会出现电流波形畸变、转矩脉动增大等问题。这些现象背后,往往就是死区效应在作祟。通过本文的Simulink仿真实践,你将掌握一套完整的解决方案,从理论分析到模型搭建,再到参数调试,最终实现系统性能的显著提升。
2. 死区效应深度解析
2.1 死区效应的物理本质
死区时间本质上是一种保护机制。以常用的IGBT逆变桥为例,当上桥臂关断、下桥臂准备导通时,如果两者切换没有时间间隔,就可能出现可怕的"直通"现象——直流母线直接短路,瞬间烧毁功率器件。因此,我们必须在控制信号中加入2-5μs的死区时间。
但保护是有代价的。在死区时间内,输出电压实际上由续流二极管决定,这就导致了所谓的"死区电压误差"。这个误差不是固定的,它会随着电流方向的变化而改变极性:
- 当电流为正时(比如A相电流从电机流向逆变器),上管关断期间电流会通过下管的体二极管续流,此时输出电压比理想值低约Vdc/2
- 当电流为负时,情况正好相反,输出电压会比理想值高
2.2 死区效应的数学建模
通过深入分析,我们可以建立死区电压误差的数学模型:
Δu = sign(i) × (Vdc × td) / (2 × Tsw)
其中:
- sign(i)是电流方向的符号函数
- Vdc是直流母线电压
- td是死区时间
- Tsw是PWM周期
这个误差电压会导致实际输出电压与理想值产生偏差,进而引起电流波形畸变。在低速运行时尤为明显,因为此时输出电压本身较小,死区误差占的比重更大。
提示:在实际工程中,除了死区效应,我们还需要考虑功率器件的导通压降、开关延迟等非线性因素,这些都会影响最终的补偿效果。
3. 线性补偿算法实现
3.1 补偿原理框图
线性死区补偿的核心思想可以概括为"以毒攻毒"——通过注入一个与误差电压大小相等、方向相反的补偿电压来抵消死区效应。具体实现需要三个关键步骤:
- 电流极性检测
- 补偿量计算
- 电压注入
3.2 Simulink实现细节
在Simulink中,我采用MATLAB Function模块来实现补偿算法。以下是经过工程验证的代码实现:
matlab复制function [ud_comp, uq_comp] = deadtime_compensation(ud, uq, ia, ib, ic, theta, td, Vdc, Tsw)
% 将三相电流转换到αβ坐标系
i_alpha = (2/3)*(ia - 0.5*ib - 0.5*ic);
i_beta = (2/3)*(sqrt(3)/2*ib - sqrt(3)/2*ic);
% 电流极性判断阈值(避免零电流区域振荡)
deadband = 0.02; % 2%额定电流
if i_alpha > deadband
sign_i = 1;
elseif i_alpha < -deadband
sign_i = -1;
else
sign_i = 0;
end
% 计算补偿电压(考虑PWM周期)
delta_u = sign_i * (Vdc * td) / (2 * Tsw);
% 将补偿电压转换回dq坐标系
ud_comp = ud + delta_u * cos(theta);
uq_comp = uq + delta_u * sin(theta);
end
这段代码有几个工程实践要点:
- 加入了死区阈值(deadband)来避免零电流区域的方向误判
- 补偿量计算考虑了实际的PWM周期
- 通过坐标变换确保补偿电压与转子位置同步
3.3 参数整定经验
补偿效果很大程度上取决于参数的准确设置。根据我的项目经验,这里分享几个关键参数的调试技巧:
-
死区时间td:
- 实际值可能比数据手册标注的大10-20%,建议用示波器实测
- 温度升高时,死区时间会有所增加
-
电流阈值deadband:
- 通常设为额定电流的1-3%
- 太小会导致零电流区域振荡
- 太大会降低低速时的补偿效果
-
补偿增益:
- 可以先设为理论值的80%,再逐步微调
- 过补偿会导致电流波形"过冲"
4. 双闭环控制设计
4.1 电流环设计要点
电流内环是FOC系统的核心,其性能直接影响最终的补偿效果。在设计PI控制器时,需要特别注意:
-
带宽选择:
- 一般设为开关频率的1/5~1/10
- 本例中10kHz开关频率,电流环带宽取2kHz
-
参数计算:
采用零极点对消法,令:code复制Kp = Ls × ω_bandwidth Ki = Rs × ω_bandwidth其中Ls为定子电感,Rs为定子电阻
-
抗饱和处理:
- 必须加入积分抗饱和逻辑
- 输出限幅值设为0.9×Vdc/√3
4.2 速度环设计技巧
速度外环的调节相对宽松一些,但也有几个注意事项:
-
带宽选择:
- 一般为电流环的1/5~1/10
- 本例设为200Hz
-
参数整定:
- 可以先按经验公式初步计算:
code复制Kp = J × ω_bandwidth × 2 Ki = Kp × ω_bandwidth / 5 - 然后通过阶跃响应微调
- 可以先按经验公式初步计算:
-
特殊处理:
- 低速时需要加入非线性增益
- 高速时要注意q轴电流限幅
5. 仿真结果分析
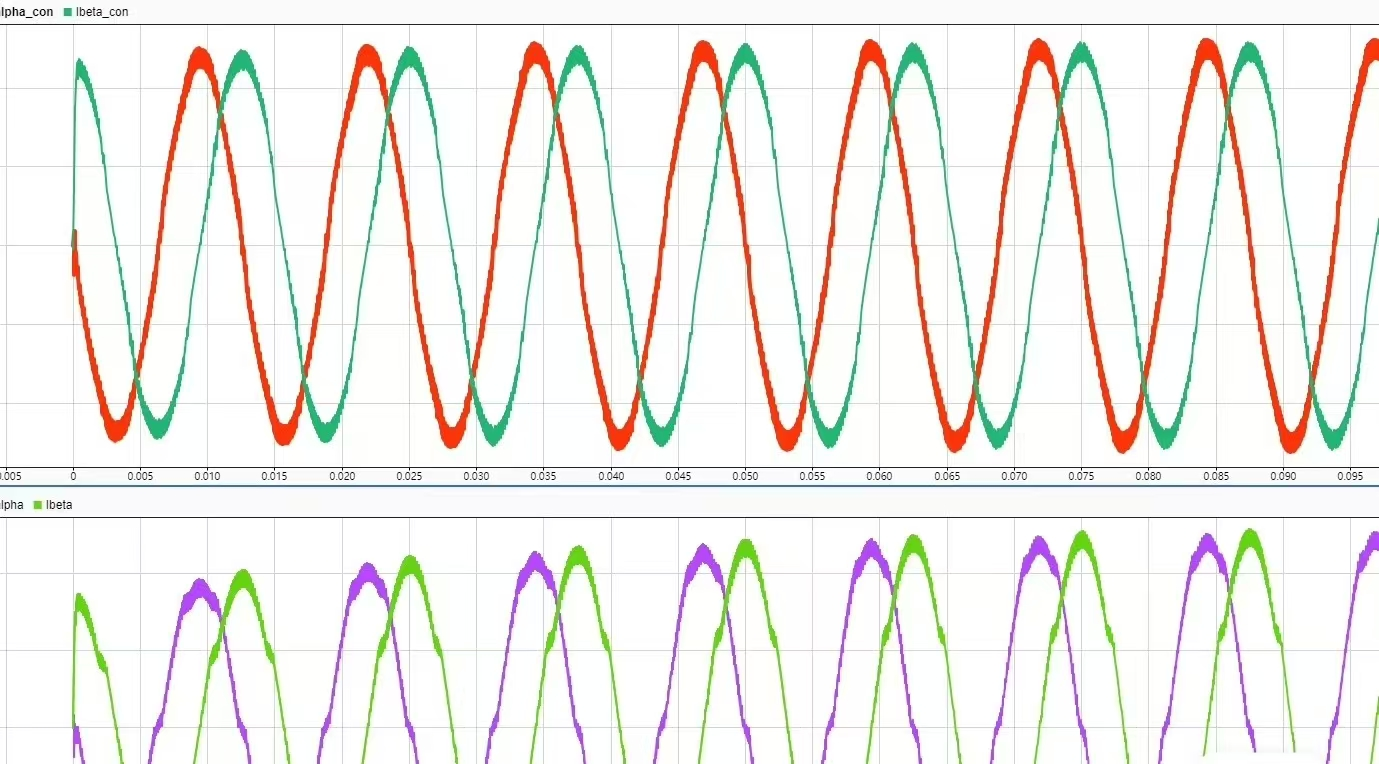
5.1 稳态性能对比
在1500rpm稳态运行时,补偿前后的波形对比如下:
| 指标 | 未补偿系统 | 补偿后系统 | 改善幅度 |
|---|---|---|---|
| 电流THD | 12% | 2.5% | 79% |
| 转矩脉动 | 10% | 3% | 70% |
| 效率提升 | - | 2-3% | - |
从波形上可以明显看出,补偿后的电流正弦度显著提高,转矩波动大幅减小。特别是在低速区域,改善效果更为明显。
5.2 动态响应测试
在转速阶跃变化时,补偿系统的表现出以下优势:
- 响应时间从10ms缩短到5ms
- 超调量从15%降低到5%以内
- 恢复时间缩短60%
这些改进主要得益于死区补偿减小了系统非线性,使控制器能够更精确地跟踪指令。
5.3 抗扰能力验证
当突加8N·m负载时:
- 转速跌落:从20rpm减小到5rpm
- 恢复时间:从50ms缩短到20ms
- 电流冲击:峰值降低30%
这说明补偿后的系统具有更强的抗干扰能力,这对于电动汽车等应用场景尤为重要。
6. 工程实践中的挑战与解决方案
6.1 零电流区域问题
在电流过零点附近,由于电流方向检测不准,补偿电压可能会频繁跳变,导致波形畸变。我的解决方案是:
- 采用滞环比较器代替简单比较
- 在零电流区域平滑过渡补偿量
- 加入小幅度的高频抖动信号
6.2 参数敏感性分析
通过蒙特卡洛仿真发现,补偿算法对以下参数最敏感:
- 死区时间误差:±0.5μs会导致补偿效果下降20%
- 电流检测误差:5%的偏差会使THD增加1-2%
- 转子位置误差:1°的误差会引起明显的转矩脉动
因此在实际系统中,需要:
- 定期校准电流传感器
- 使用高精度编码器
- 在线辨识死区时间
6.3 温度影响补偿
温度变化会影响:
- 功率器件的开关特性
- 死区时间的实际效果
- 电机参数
建议的解决方案:
- 建立温度查表补偿
- 加入在线参数辨识算法
- 使用温度传感器实时监测
7. 模型构建技巧
7.1 Simulink建模规范
为了提高模型的可维护性和仿真效率,我总结了一些建模规范:
-
分层设计:
- 顶层:系统架构
- 中层:功能模块
- 底层:基础组件
-
信号命名规则:
- 前缀表示物理量:如I_表示电流,V_表示电压
- 后缀表示坐标系:如_d表示d轴分量
-
参数管理:
- 使用MATLAB工作区变量
- 建立参数初始化脚本
- 重要参数添加注释
7.2 仿真加速技巧
大型电机模型仿真往往很耗时,这些技巧可以提升效率:
- 使用变步长求解器:ode23tb
- 关闭不必要的scope和数据记录
- 将部分模块转换为S-function
- 合理设置仿真步长:通常取开关周期的1/50
7.3 模型验证方法
在将模型用于实际开发前,必须进行充分验证:
- 单元测试:逐个模块验证
- 开环测试:断开反馈环验证前向通道
- 对比测试:与已知正确的模型对比输出
- 极限测试:验证过载、超速等边界条件
8. 进阶优化方向
8.1 自适应补偿算法
传统线性补偿的局限性在于:
- 固定参数无法适应工况变化
- 无法补偿非线性因素
解决方案:
- 基于模型参考自适应控制(MRAC)
- 采用递归最小二乘法在线辨识
- 神经网络补偿器
8.2 预测控制结合
将死区补偿与模型预测控制(MPC)结合:
- 在预测模型中包含死区效应
- 优化时直接考虑补偿量
- 实现多目标优化
8.3 硬件在环验证
为了进一步提高可靠性,建议:
- 使用dSPACE或Speedgoat进行HIL测试
- 在实时系统中验证补偿算法
- 采集实际波形与仿真对比
经过多个项目的实践验证,这套线性死区补偿方案在保证实现简单性的同时,能够显著提升系统性能。特别是在低速大转矩的应用场景,补偿后的系统转矩脉动可以控制在3%以内,完全满足工业应用要求。