
1. STM32 CubeIDE定时器项目概述
在嵌入式开发中,定时器是最基础也最核心的外设之一。我最近在做一个需要精确计时的项目,使用STM32F103C8T6开发板配合STM32CubeIDE环境,通过TIM4定时器实现了1秒周期的精确计时,并通过USART2串口将计数值实时输出到终端。这个方案特别适合需要周期性执行任务的应用场景,比如数据采集、设备状态监测等。
整个项目的核心在于定时器的配置和使用。STM32的定时器功能非常强大,但也相对复杂,初学者容易在时钟配置、分频系数设置等环节出错。通过这个案例,我将详细讲解从工程创建到代码实现的完整流程,特别是那些容易踩坑的细节。无论你是刚接触STM32的新手,还是有一定经验的开发者,都能从中获得实用的参考价值。
2. 硬件环境与工程创建
2.1 开发板选型与连接
我使用的是STM32F103C8T6最小系统板,也就是大家常说的"蓝莓板"。这款开发板性价比极高,内置ARM Cortex-M3内核,主频可达72MHz,完全能满足大多数嵌入式项目的需求。连接方面,你需要准备:
- 一根USB转TTL串口模块(如CH340G),用于连接开发板的USART2(PA2-TX, PA3-RX)
- 开发板的SWD调试接口连接ST-Link下载器
- 如果追求更高的定时精度,建议外接8MHz晶振(虽然开发板自带,但质量参差不齐)
注意:串口模块的TX接开发板RX,RX接TX,千万别接反了。我就曾因为这个小错误调试了半天。
2.2 CubeIDE工程创建步骤
打开STM32CubeIDE,按照以下步骤创建新工程:
- File → New → STM32 Project
- 在MCU/MPU Selector中输入"STM32F103C8",选择对应的型号
- 设置工程名称(如"Timer_Demo")和保存路径
- 在Project Firmware选项中选择最新版本的HAL库
- 点击Finish完成创建
创建完成后,IDE会自动生成基本的工程框架和启动文件。接下来就是关键的配置环节了。
3. 时钟系统配置详解
3.1 RCC时钟源设置
时钟是定时器精度的基础。在Pinout & Configuration视图的System Core → RCC中:
- 将High Speed Clock (HSE)设置为"Crystal/Ceramic Resonator"
- Low Speed Clock (LSE)保持默认的"Disable"即可
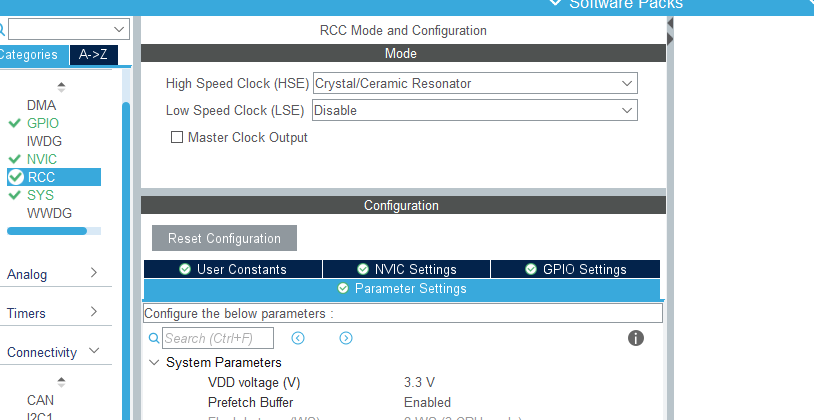
这一步告诉芯片使用外部晶振作为时钟源。STM32F103的HSE频率通常是8MHz,但实际值取决于你的开发板。如果使用最小系统板而没有外接晶振,则需要使用内部HSI时钟(精度较差)。
3.2 时钟树配置
点击Clock Configuration选项卡,这里需要精心设置:
- 在HSE输入框输入你的晶振频率(通常8MHz)
- 将PLL Source Mux选择为"HSE"
- 设置PLLMUL为x9(8MHz × 9 = 72MHz)
- 将系统时钟源切换到PLLCLK
- 确保HCLK(AHB总线时钟)设置为72MHz
- APB1 Prescaler设为2(36MHz),APB2 Prescaler设为1(72MHz)
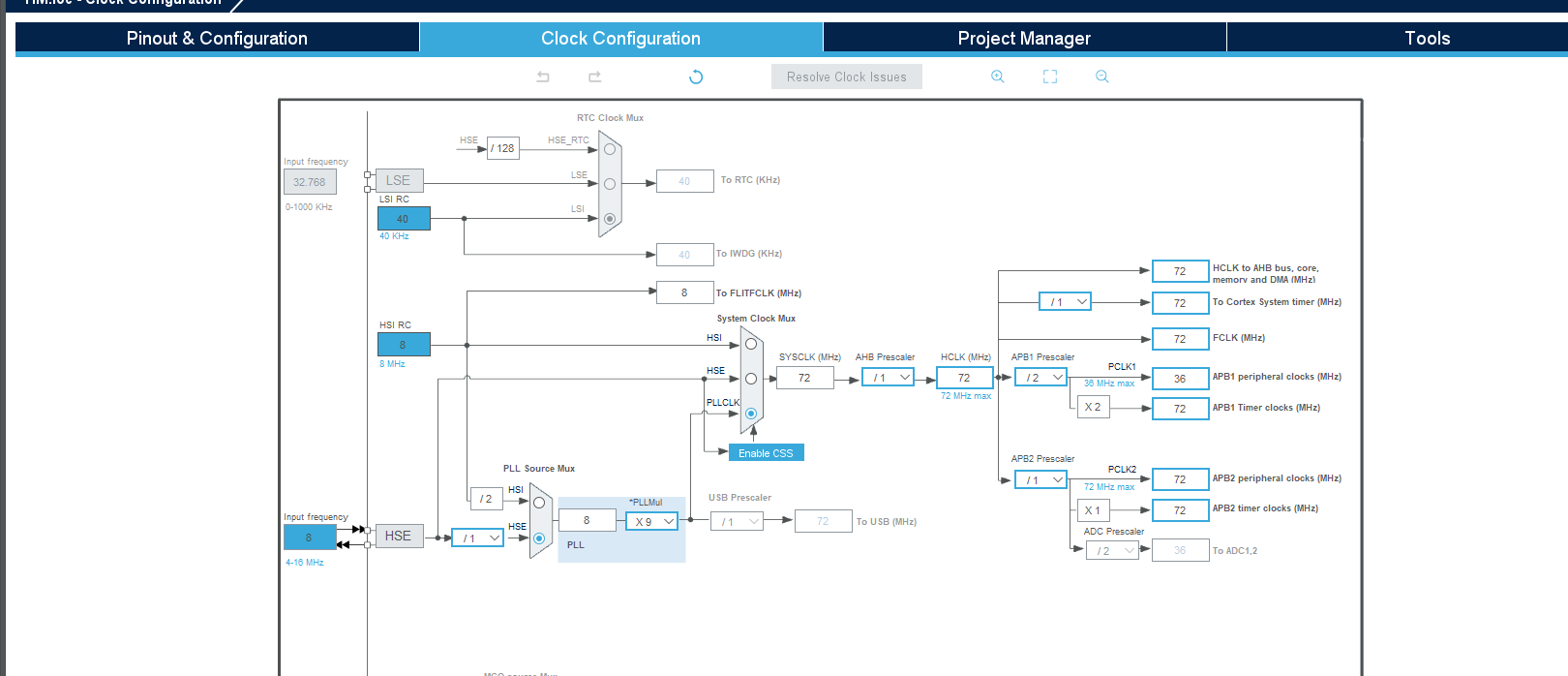
这里有个关键点:定时器时钟源。STM32的定时器时钟来自APB总线,但有个特殊机制——当APB预分频为1时,定时器时钟等于APB时钟;否则等于APB时钟×2。所以TIM4的实际时钟是36MHz×2=72MHz。
4. 定时器配置实战
4.1 TIM4基础配置
在Pinout & Configuration视图的Timers → TIM4中:
- 将Clock Source设为"Internal Clock"
- 在Parameter Settings中:
- Prescaler设为7199(7200-1)
- Counter Mode设为"Up"
- Counter Period设为9999(10000-1)
- auto-reload preload设为"Enable"
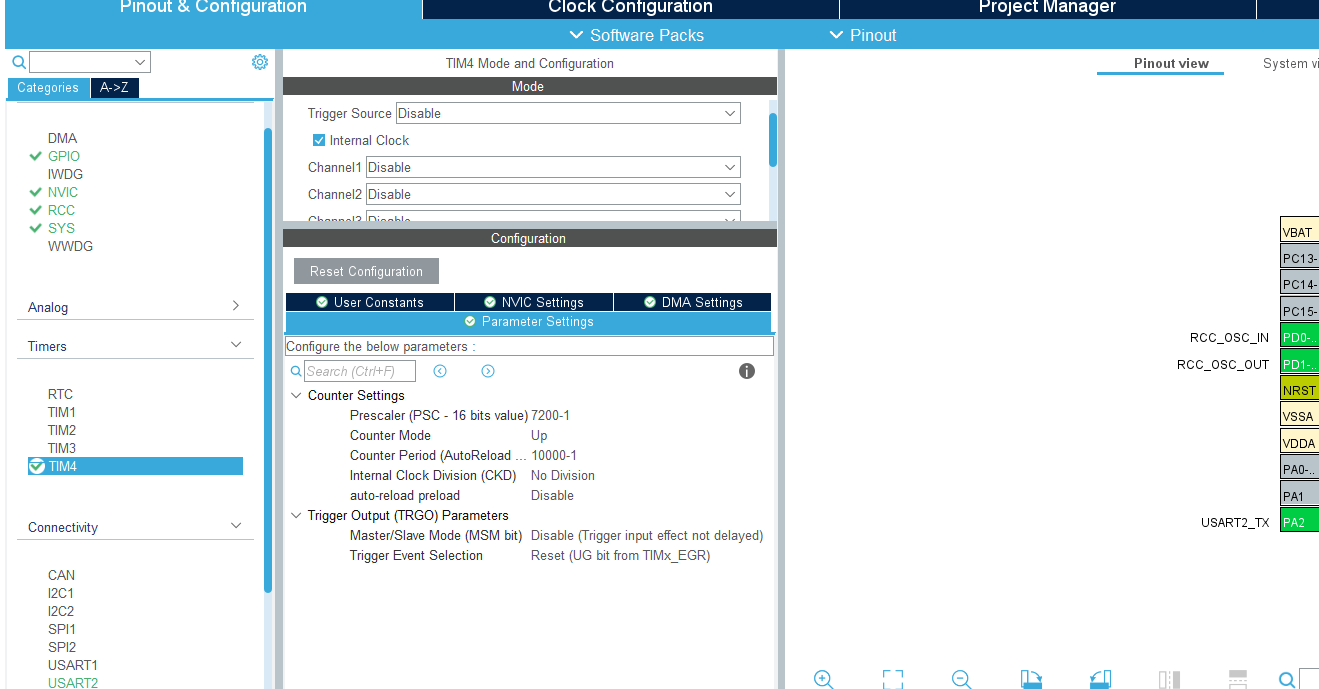
这里的分频系数计算是关键。定时器的时钟频率为72MHz,经过7200分频后:
72,000,000 / 7200 = 10,000Hz(即每0.1ms计数一次)
然后设置自动重装载值为9999(即计数到10000次),这样定时周期就是:
0.1ms × 10000 = 1000ms = 1秒
4.2 中断配置
虽然我们使用HAL库的中断回调机制,但仍需在NVIC中使能定时器中断:
- 在NVIC Configuration中勾选"TIM4 global interrupt"
- 设置合适的优先级(默认即可)
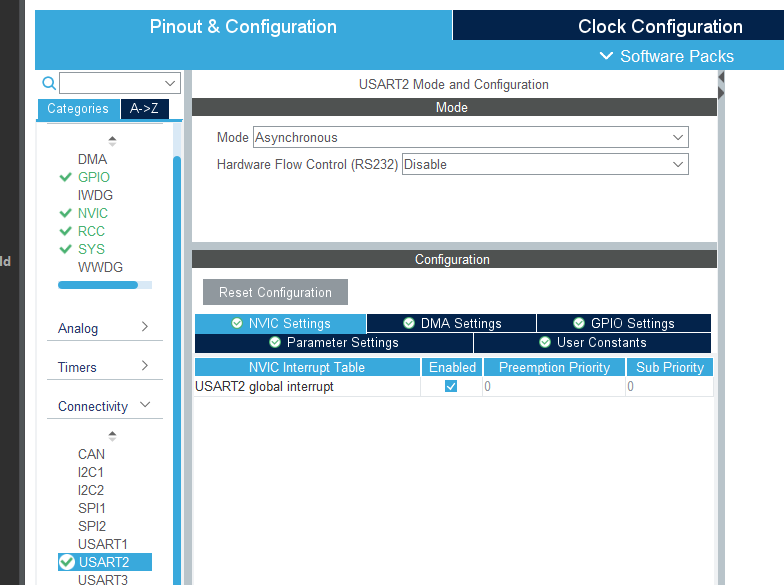
同时,我们还需要配置USART2的中断:
- Connectivity → USART2
- Mode设为"Asynchronous"
- 在NVIC Settings中使能"USART2 global interrupt"
- 波特率设为115200(或其他你喜欢的值)
5. 代码实现与分析
5.1 定时器启动代码
在main.c的main函数中,找到/* USER CODE BEGIN 2 */部分,添加:
c复制HAL_TIM_Base_Start_IT(&htim4); // 启动TIM4并开启中断
这行代码启动了定时器4的基本定时功能,并使能了中断。HAL库会处理底层的中断配置,我们只需要关注回调函数。
5.2 定时器中断回调
在stm32f1xx_it.c中,HAL库已经为我们生成了TIM4_IRQHandler。我们不需要直接修改它,而是通过重写回调函数来实现功能:
在main.c中添加:
c复制// 定义全局变量
int counter = 0;
char message[20];
// 定时器溢出回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if(htim->Instance == TIM4) {
counter = __HAL_TIM_GET_COUNTER(&htim4); // 获取当前计数值
sprintf(message, "counter: %d\n", counter);
HAL_UART_Transmit_IT(&huart2, (uint8_t*)message, strlen(message));
}
}
这段代码会在每次定时器溢出(即计数达到自动重装载值)时被调用。我们通过__HAL_TIM_GET_COUNTER宏获取当前计数值,然后通过串口发送出去。
5.3 串口发送实现
串口发送使用了中断模式(HAL_UART_Transmit_IT),这比轮询模式更高效。当发送完成后,会触发USART2的中断,HAL库会自动处理。如果你需要确认发送完成,可以重写以下回调:
c复制void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart) {
if(huart->Instance == USART2) {
// 发送完成后的处理代码
}
}
6. 调试与优化技巧
6.1 常见问题排查
-
定时不准:
- 检查晶振是否起振(用示波器看OSC_IN引脚)
- 确认时钟树配置正确,特别是PLL倍频和分频设置
- 检查APB1预分频是否为2(TIM4挂载在APB1上)
-
串口无输出:
- 确认TX/RX线序正确
- 检查波特率设置是否与终端软件一致
- 确保串口模块供电正常(有些CH340需要外部供电)
-
程序卡死:
- 可能是中断优先级冲突,调整NVIC优先级分组
- 检查堆栈大小是否足够(在启动文件中修改)
6.2 性能优化建议
-
如果对定时精度要求极高:
- 使用外部有源晶振
- 在定时器中断中禁用全局中断(__disable_irq())以减少抖动
- 考虑使用TIM的编码器模式或输入捕获功能
-
减少串口传输开销:
- 使用DMA传输代替中断传输
- 增大发送缓冲区,减少发送频率
- 使用二进制协议代替文本协议
-
低功耗优化:
- 在定时器中断唤醒后立即进入低功耗模式
- 降低系统时钟频率(如果实时性要求不高)
- 关闭未使用的外设时钟
7. 进阶应用扩展
7.1 多定时器协同工作
在实际项目中,常常需要多个定时器配合。例如:
- TIM1用于PWM输出控制电机
- TIM2用于输入捕获测量脉冲宽度
- TIM3和TIM4用于不同周期的定时任务
这时需要注意:
- 合理分配定时器资源(高级/通用/基本定时器)
- 协调中断优先级,确保关键任务不被延迟
- 避免在中断服务程序中执行耗时操作
7.2 定时器与RTOS结合
在FreeRTOS等实时操作系统中使用定时器时:
- 将定时器中断用作RTOS的时钟节拍(tick)
- 在中断中发送信号量或消息队列通知任务
- 避免在中断中直接调用RTOS的API(如vTaskDelay)
示例代码:
c复制void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if(htim->Instance == TIM4) {
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
xSemaphoreGiveFromISR(xTimerSemaphore, &xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
}
7.3 定时器精度测量
要验证定时器的实际精度,可以:
- 使用另一个定时器(如TIM2)的输入捕获功能测量输出脉冲
- 用逻辑分析仪或示波器观察定时器中断引脚的电平变化
- 通过串口输出时间戳进行统计分析
我在实际测试中发现,使用外部晶振时,72MHz系统时钟下的定时误差可以控制在0.01%以内,完全能满足大多数工业应用的需求。
8. 项目实战心得
经过这个项目的实践,我总结了几个关键经验:
-
时钟配置是基础:定时器的精度直接依赖于系统时钟的准确性。务必仔细检查时钟树配置,特别是PLL和分频设置。我曾经因为APB1分频设置错误,导致定时器速度慢了整整一倍。
-
中断优先级很重要:当系统中有多个中断源时,不合理的优先级设置会导致定时不准甚至系统卡死。建议将定时器中断设为较高优先级,但低于硬件故障和系统定时器中断。
-
HAL库虽方便但也有坑:HAL_TIM_Base_Start_IT()函数实际上已经包含了中断使能,不需要再额外调用__HAL_TIM_ENABLE_IT()。我最初没注意这点,导致重复使能中断引发异常。
-
调试信息要适度:虽然串口打印很方便,但频繁的输出会影响定时精度。在最终产品中,应该减少调试输出或使用更高效的日志方式。
-
考虑使用LL库:对性能要求高的场合,可以尝试直接使用LL(Low Layer)库操作寄存器,这能减少HAL库的开销,提高定时精度。
这个项目虽然看起来简单,但涵盖了STM32开发的多个核心知识点。通过它,我不仅巩固了定时器的使用,还对STM32的时钟系统和中断机制有了更深入的理解。建议初学者可以基于这个框架,尝试实现更复杂的功能,比如PWM输出、输入捕获等,逐步掌握STM32定时器的强大功能。