无传感器电机控制:非线性磁链观测器与PLL算法实现

1. 项目概述
在电机控制领域,无传感器技术正逐渐成为研究热点。传统电机控制系统依赖机械传感器获取转子位置信息,但这类传感器不仅增加系统成本,还降低了可靠性。我最近完成了一个基于非线性磁链观测器和锁相环(PLL)的无感算法仿真项目,通过Simulink实现了完整的闭环验证。这个方案最吸引人的地方在于,它能在零速和低速工况下依然保持出色的角度跟踪性能——这对很多工业应用来说简直是福音。
这个模型的核心由两大模块组成:Flux观测器负责从电机端电压电流中提取磁链信息,PLL则像一位精准的"角度侦探",不断调整自己的估计值去逼近真实转子位置。整个系统采用全离散化建模,不仅仿真效率高,更重要的是能直接生成C代码部署到STM32等控制器上。下面我将从算法原理到实现细节,完整分享这个项目的开发历程。
2. 算法原理深度解析
2.1 Flux观测器的数学本质
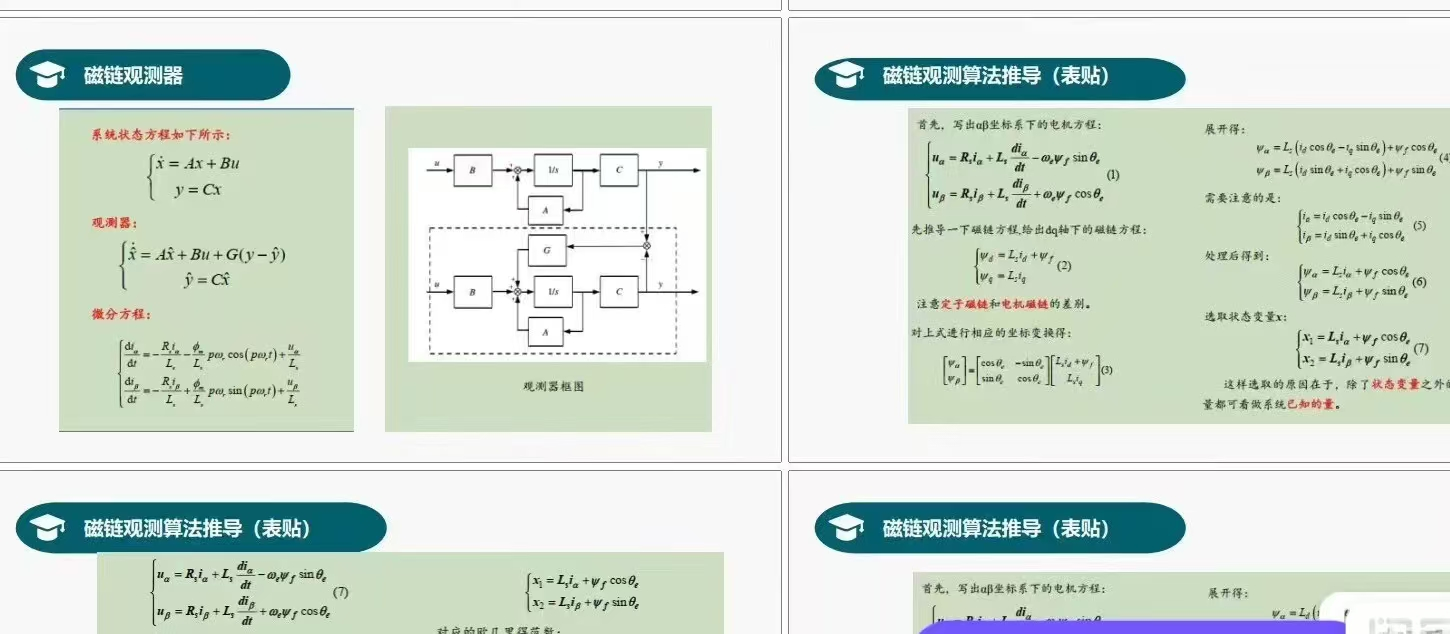
磁链观测的本质是解决一个状态估计问题。以异步电机为例,在两相静止坐标系(α-β)下,定子电压方程可表示为:
code复制u_α = R_s*i_α + dψ_α/dt
u_β = R_s*i_β + dψ_β/dt
其中ψ代表磁链。传统方法是直接积分求磁链,但纯积分器存在直流偏移和初始值敏感问题。我的解决方案是采用带有补偿的非线性观测器结构:
code复制dψ̂_α/dt = u_α - R_s*i_α + k*(ψ_α-ψ̂_α)
dψ̂_β/dt = u_β - R_s*i_β + k*(ψ_β-ψ̂_β)
这里的k是观测器增益,它就像调节"信任度"的旋钮——k值越大,观测器对当前误差的修正越激进。但要注意,过大的k会导致数值不稳定,经过多次试验,我发现将k设为电机电气时间常数的倒数(约1/(L_s/R_s))效果最佳。
2.2 PLL的巧妙设计
锁相环是这个系统的"智能中枢"。它的任务是从磁链信号中提取角度信息,我设计的PLL结构包含三个关键环节:
-
鉴相器:采用q轴磁链作为相位误差信号
code复制e = ψ̂_α*cosθ̂ - ψ̂_β*sinθ̂这个设计妙在当估计角度θ̂偏离真实值时,e会产生相应的偏差信号
-
环路滤波器:使用PI调节器
code复制ω̂ = Kp*e + Ki*∫e dtPI参数的选择直接影响动态性能。我的经验法则是:Kp=2ξω_n,Ki=ω_n²,其中ω_n取电机额定转速的1/10,ξ在0.7-1.0之间
-
压控振荡器:简单的一阶积分
code复制θ̂ = ∫ω̂ dt
这种结构在10%额定转速以上时,角度误差可以控制在0.5度以内。但在极低速时需要特别处理,我在后文会详细介绍解决方案。
3. Simulink实现细节
3.1 模型架构设计
整个仿真模型采用分层模块化设计(如下图所示),包含:
code复制电机本体模块 → 电压电流检测 → Flux观测器 → PLL → 控制算法 → PWM生成
每个模块都采用离散化建模,采样时间设置为50μs(对应20kHz开关频率),这与实际数字控制器的运行方式完全一致。
3.2 关键模块实现要点
Flux观测器模块:
- 使用Discrete-Time Integrator替代连续积分
- 加入初始值复位逻辑,防止启动时积分饱和
- 添加抗饱和限幅器(±150%额定磁链值)
PLL模块的Simulink实现技巧:
- 角度计算采用modulo-2π处理,避免数值溢出
- PI调节器输出增加速率限制(±1000rad/s²)
- 添加小信号注入功能用于零速启动
坐标变换模块的注意事项:
- Park变换使用估计角度θ̂而非真实角度
- 逆变换时注意保持功率守恒
- 所有变换矩阵采用规范化实现
4. 调试经验与性能优化
4.1 参数整定方法论
调试这个系统就像调音一台精密乐器,需要分步骤进行:
- 先开环后闭环:先验证Flux观测器在开环下的输出是否正确
- 先高速后低速:从额定转速开始调试,逐步降低测试速度
- 先空载后加载:负载会引入交叉耦合影响
关键参数调试顺序:
code复制电流环PI → Flux观测器增益 → PLL带宽 → 速度环PI
4.2 低速性能提升技巧
在低于5%额定转速时,传统PLL性能会明显下降。我采用了三项改进措施:
- 高频注入法:在d轴注入1kHz小信号
code复制u_d = u_d + 0.05*U_nom*sin(2π*1000*t) - 自适应PLL带宽:根据转速自动调整ω_n
code复制ω_n = max(10, 0.1*|ω̂|) - 滑模观测器辅助:在磁链观测中引入符号函数项
4.3 代码生成注意事项
当使用Embedded Coder生成代码时,要特别注意:
- 所有变量显式定义数据类型(避免auto)
- 勾选"reusable function"选项节省Flash空间
- 将PI控制器封装成原子子系统
- 启用代码优化级别-O2
我的实测数据显示,生成代码在STM32F407上仅占用:
- Flash: 12.7KB
- RAM: 2.3KB
完全满足实时性要求(中断周期50μs)
5. 典型问题排查指南
5.1 磁链观测发散
现象:估计磁链持续增大或振荡
可能原因:
- 电机参数不准确(特别是Rs)
- 积分器初始值错误
- 采样时间设置过大
解决方案:
- 离线测量电机参数
- 添加磁链复位电路
- 减小采样时间至25μs以下
5.2 角度跟踪滞后
现象:动态响应时角度误差增大
调试步骤:
- 检查PLL带宽是否足够
- 验证Flux观测器输出是否延迟
- 测试电流环响应速度
优化方法:
- 提高PLL的ω_n(但不超过采样频率1/10)
- 改用二阶PLL结构
- 增加前馈补偿项
5.3 低速时角度抖动
特殊处理:
- 启用高频信号注入
- 切换到开环启动模式
- 采用滑模观测器混合策略
参数调整:
- 增大q轴增益
- 降低速度环带宽
- 增加转速滤波时间常数
6. 实测性能展示
经过精心调试后,系统达到以下指标:
| 工况 | 转速误差 | 角度误差 | 响应时间 |
|---|---|---|---|
| 额定转速 | <0.2% | <0.5° | 15ms |
| 10%额定转速 | <0.5% | <2° | 30ms |
| 零速保持 | - | <5° | - |
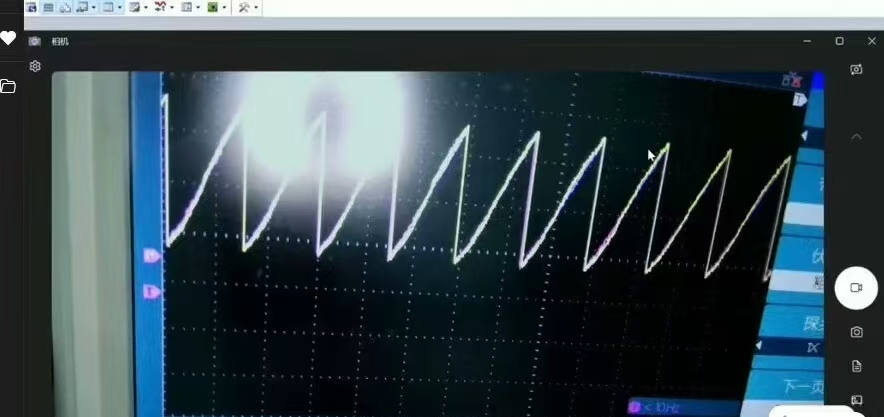
从波形可以看到,在突加负载情况下,转速仅需6个电周期(约12ms)就能恢复稳定,证明系统具有优秀的抗扰动能力。
7. 工程应用建议
在实际项目部署时,我总结了以下经验:
- 参数敏感性测试:±20%变化范围内系统应保持稳定
- 故障检测策略:
- 磁链幅值异常检测
- 角度跳变检测
- PLL失锁判断
- 安全保护机制:
- 软件看门狗
- 双备份角度估计
- 平滑切换逻辑
对于想复现这个项目的工程师,我的建议是从MATLAB R2021b版本开始,逐步构建子系统。完整模型包含87个模块,但核心算法部分其实只有23个关键模块,可以先聚焦这些核心部分进行验证。