
1. ESP32-S3调试问题深度解析
最近在使用ESP32-S3-KORVO-2_V3开发板进行调试时,遇到了"OpenOCD is not running. Please start OpenOCD before launching the debug session"的错误提示。经过一番折腾终于解决了问题,这里把完整的排查过程和解决方案分享给大家,特别是针对这块特殊开发板的硬件改造细节。
这个错误表面上看是OpenOCD调试服务没有启动,但实际上可能涉及硬件连接、驱动配置、调试接口启用等多个环节。对于ESP32-S3-KORVO-2_V3这块开发板,由于其特殊的设计,需要特别注意USB接口的硬件改造。
2. 硬件连接检查与改造
2.1 开发板USB接口特殊性分析
ESP32-S3-KORVO-2_V3开发板的一个关键特点是它没有直接暴露ESP32-S3芯片的原生USB接口,而是通过CP2102N串口转换芯片与电脑通信。这种设计在日常使用时没有问题,但在需要JTAG调试时就会遇到障碍。
重要提示:原生USB接口对于JTAG调试至关重要,因为调试信息需要通过USB接口直接与芯片通信,而不是通过串口转换芯片。
2.2 必要的硬件改造步骤
要让开发板支持JTAG调试,需要进行以下硬件改造:
-
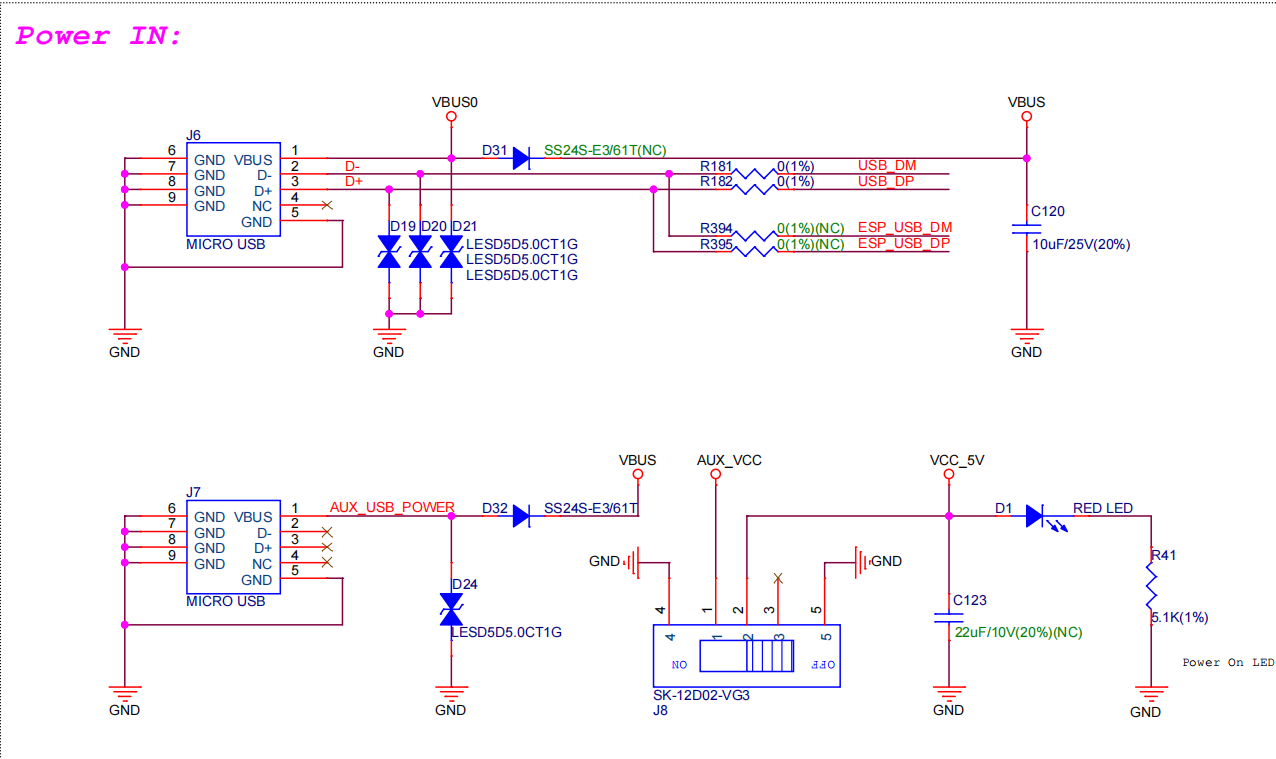
移除电阻:找到板子上的R181和R182电阻位置,将它们移除。这两个电阻默认连接了串口转换芯片的信号线。
-
焊接0欧姆电阻:在R394和R395位置焊接0欧姆电阻(或直接短接)。这两个位置连接的是ESP32-S3芯片的原生USB信号线。
-
检查连接:改造完成后,用万用表检查以下关键点:
- DP(D+)信号是否从USB接口直连到ESP32-S3
- DM(D-)信号是否从USB接口直连到ESP32-S3
- 5V和GND连接是否正常
2.3 改造后的验证
完成硬件改造后,可以通过以下方法验证是否成功:
- 连接开发板到电脑,检查设备管理器中是否出现新的USB设备
- 如果出现未知设备,说明硬件改造基本成功,接下来需要安装正确的驱动
3. 驱动程序配置详解
3.1 Windows默认驱动的问题
即使完成了硬件改造,Windows系统自带的USB驱动程序通常也无法满足JTAG调试的需求。这是因为:
- 标准USB驱动不包含OpenOCD所需的调试功能
- 驱动可能需要特定的权限和配置才能支持调试接口
3.2 使用Zadig工具安装正确驱动
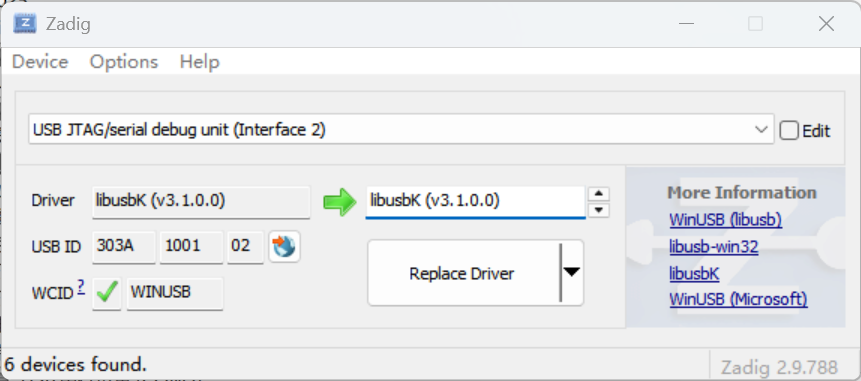
Zadig是一个专业的USB驱动管理工具,可以帮我们安装适合调试的驱动:
- 下载并运行Zadig工具(最新版本可从官网获取)
- 在Options菜单中勾选"List All Devices"
- 从设备列表中找到ESP32-S3开发板(可能显示为未知设备)
- 选择"WinUSB"或"libusb-win32"作为驱动类型
- 点击"Install Driver"或"Replace Driver"按钮
3.3 驱动安装后的验证
驱动安装成功后,可以通过以下方法验证:
- 设备管理器中设备应显示为"WinUSB Device"或类似名称
- 没有黄色感叹号或错误提示
- 运行OpenOCD时应该能够检测到设备
4. OpenOCD配置与调试
4.1 OpenOCD配置文件
正确的OpenOCD配置对于调试成功至关重要。针对ESP32-S3,推荐使用以下配置:
bash复制# esp32s3.cfg配置文件示例
source [find interface/ftdi/esp32s3_khci.cfg]
source [find target/esp32s3.cfg]
# 调试参数配置
reset_config none
adapter speed 20000
4.2 启动OpenOCD服务
在终端中运行以下命令启动OpenOCD:
bash复制openocd -f board/esp32s3-builtin.cfg
成功启动后,你应该看到类似以下的输出:
code复制Info : Listening on port 3333 for gdb connections
Info : esp32s3: Debug controller was reset (pwrstat=0x5F, after clear 0x0F).
Info : esp32s3: Core was reset (pwrstat=0x5F, after clear 0x0F).
4.3 常见启动错误排查
如果OpenOCD仍然无法启动,可以检查以下方面:
- 确保没有其他程序占用USB接口
- 尝试降低JTAG时钟速度(adapter speed 10000)
- 检查硬件连接是否牢固
- 尝试不同的USB线缆(有些线缆只支持充电不支持数据传输)
5. IDE中的调试配置
5.1 VSCode配置示例
如果你使用VSCode进行开发,需要在launch.json中添加如下配置:
json复制{
"version": "0.2.0",
"configurations": [
{
"name": "ESP32-S3 Debug",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/build/${command:cmake.launchTargetName}",
"cwd": "${workspaceFolder}",
"MIMode": "gdb",
"miDebuggerPath": "xtensa-esp32s3-elf-gdb",
"miDebuggerServerAddress": "localhost:3333",
"setupCommands": [
{
"text": "target remote localhost:3333"
},
{
"text": "mon reset halt"
}
]
}
]
}
5.2 Eclipse配置要点
对于Eclipse用户,需要注意:
- 在Debug Configuration中指定正确的GDB路径
- 设置正确的端口号(默认3333)
- 在Startup选项中添加"mon reset halt"命令
- 确保工程编译时启用了调试符号(-g选项)
6. 高级调试技巧
6.1 多核调试配置
ESP32-S3是双核处理器,调试时可能需要特殊配置:
bash复制# 在OpenOCD配置中添加
target smp on
6.2 闪存编程加速
为了提高调试效率,可以启用闪存编程加速:
bash复制# 在OpenOCD启动后执行
flash protect 0 0 last off
program_esp filename.bin 0x10000 verify
6.3 实时变量监控
在GDB中可以使用以下命令实时监控变量:
bash复制display variable_name
watch variable_name
7. 常见问题解决方案
7.1 权限问题处理
在Linux系统下可能会遇到USB设备权限问题,可以通过以下命令解决:
bash复制sudo usermod -a -G dialout $USER
sudo usermod -a -G plugdev $USER
然后注销重新登录。
7.2 驱动冲突解决
如果之前安装过其他驱动导致冲突,可以:
- 在设备管理器中完全卸载设备
- 删除残留的驱动文件
- 重新插拔设备并安装正确驱动
7.3 调试连接不稳定
如果调试过程中频繁断开连接,可以尝试:
- 使用更短的USB线缆
- 降低JTAG时钟速度
- 检查电源供应是否稳定
- 在OpenOCD配置中添加"adapter_khz 1000"
8. 性能优化建议
8.1 OpenOCD性能调优
在openocd.cfg中添加以下配置可以提升性能:
bash复制adapter speed 20000
jtag_rclk 1000
8.2 GDB优化配置
在.gdbinit文件中添加以下配置:
bash复制set remotetimeout 30
set mem inaccessible-by-default off
8.3 调试信息压缩
为了减少调试文件大小,可以使用DWARF压缩格式:
bash复制xtensa-esp32s3-elf-gcc -g -gdwarf-4 -gz=zlib
9. 替代方案比较
9.1 不同调试接口对比
| 接口类型 | 速度 | 稳定性 | 硬件要求 | 适用场景 |
|---|---|---|---|---|
| JTAG | 高 | 高 | 专用接口 | 深度调试 |
| SWD | 中 | 高 | 2线 | 资源有限 |
| 串口 | 低 | 中 | 无需改造 | 简单日志 |
9.2 不同开发板比较
| 开发板型号 | USB直连 | 调试接口 | 改造难度 | 推荐指数 |
|---|---|---|---|---|
| ESP32-S3-KORVO-2_V3 | 需改造 | JTAG | 中等 | ★★★☆☆ |
| ESP32-S3-DevKitC-1 | 原生支持 | JTAG/SWD | 无需 | ★★★★★ |
| ESP-Prog | 专用调试器 | JTAG/SWD | 无需 | ★★★★☆ |
10. 扩展应用
10.1 多设备调试
当需要同时调试多个ESP32-S3设备时:
- 为每个设备分配唯一的USB端口
- 在OpenOCD配置中指定不同的端口号
- 使用不同的GDB端口连接
bash复制openocd -f board/esp32s3-builtin.cfg -c "gdb_port 3334"
10.2 远程调试配置
可以通过网络进行远程调试:
- 在OpenOCD配置中添加:
bash复制telnet_port 4444
gdb_port 3333
tcl_port 6666
- 在GDB连接时指定远程IP地址
10.3 自动化调试脚本
创建自动化调试脚本可以提高效率:
bash复制#!/bin/bash
# 启动OpenOCD
openocd -f board/esp32s3-builtin.cfg &
# 等待服务启动
sleep 2
# 启动GDB
xtensa-esp32s3-elf-gdb -x gdb_commands.gdb
11. 硬件设计建议
11.1 调试接口布局
在设计自己的ESP32-S3板时,建议:
- 将JTAG信号线走线尽量短且等长
- 添加适当的滤波电容
- 预留测试点
- 考虑添加缓冲器提高信号质量
11.2 电源设计要点
稳定的电源对调试至关重要:
- 核心电压必须稳定在3.3V±5%
- 建议使用LDO而非DCDC转换器
- 添加足够的去耦电容
- 考虑独立的调试接口供电
12. 软件生态支持
12.1 官方工具链支持
Espressif提供的工具链对调试的支持:
- ESP-IDF提供了完整的调试支持
- 官方维护OpenOCD的分支版本
- 定期更新GDB工具链
12.2 第三方工具集成
常用的第三方工具如何支持ESP32-S3调试:
- PlatformIO的调试配置
- SEGGER Embedded Studio支持
- IAR Embedded Workbench支持
13. 调试实战案例
13.1 启动失败分析
案例:设备启动时卡在ROM bootloader
解决方法:
- 连接JTAG调试器
- 在GDB中设置断点在app_main
- 单步执行分析卡住的位置
- 检查闪存初始化代码
13.2 内存泄漏追踪
使用JTAG调试内存泄漏问题:
- 在GDB中设置内存访问断点
- 使用OpenOCD的内存监视功能
- 分析堆内存分配情况
- 追踪内存分配调用栈
14. 安全调试考虑
14.1 调试接口安全
生产环境中需要考虑:
- 禁用调试接口
- 启用闪存加密
- 使用安全启动
- 物理上移除调试接口
14.2 调试信息保护
敏感信息保护措施:
- 不要在调试版本中包含敏感数据
- 使用符号文件分离
- 加密调试通信
- 控制调试访问权限
15. 性能分析技巧
15.1 实时性能监控
使用JTAG进行性能分析:
- 设置性能计数器
- 监控CPU负载
- 分析中断频率
- 追踪函数执行时间
15.2 功耗调试方法
结合调试接口进行功耗分析:
- 设置低功耗断点
- 监控电源管理寄存器
- 分析睡眠模式转换
- 优化唤醒源配置
16. 跨平台调试
16.1 Linux环境配置
Linux下的特殊配置:
- udev规则设置
- 用户组权限配置
- 内核模块加载
- 串口设备访问权限
16.2 macOS注意事项
macOS平台的特殊性:
- 驱动签名问题
- USB设备识别
- 工具链兼容性
- 权限管理差异
17. 固件更新调试
17.1 OTA调试技巧
调试固件更新过程:
- 设置更新过程断点
- 监控闪存写入操作
- 验证校验和计算
- 分析回滚机制
17.2 安全更新验证
安全更新调试要点:
- 签名验证过程
- 版本兼容性检查
- 更新中断恢复
- 错误处理流程
18. 多语言支持
18.1 MicroPython调试
调试MicroPython应用:
- 原生代码与字节码混合调试
- 设置Python层断点
- 监控虚拟机状态
- 分析内存管理
18.2 Rust应用调试
Rust语言调试特点:
- 名称修饰处理
- 所有权调试
- 异步任务追踪
- 不安全代码分析
19. 无线调试技术
19.1 蓝牙调试方法
通过蓝牙进行调试:
- 配置蓝牙调试通道
- 无线GDB连接
- 日志传输优化
- 带宽管理
19.2 Wi-Fi调试技巧
利用Wi-Fi进行远程调试:
- 建立TCP调试通道
- 加密调试通信
- 处理网络延迟
- 断线重连机制
20. 生产测试应用
20.1 自动化测试接口
利用JTAG进行生产测试:
- 批量编程接口
- 自动化测试脚本
- 生产测试夹具
- 测试结果收集
20.2 质量控制应用
调试接口在质量控制中的应用:
- 参数校准
- 功能验证
- 性能测试
- 故障诊断
在实际调试过程中,我发现ESP32-S3的调试接口非常强大,但需要正确的硬件连接和软件配置才能发挥最大效用。特别是对于ESP32-S3-KORVO-2_V3这样的开发板,硬件改造是必不可少的步骤。建议在进行任何调试前,先确认硬件连接正确,驱动安装无误,这样可以节省大量排查时间。