
1. 项目概述与背景
最近在工业自动化项目中遇到了一个典型需求:需要通过LabVIEW上位机软件控制西门子S7-1200 1214 DC/DC/DC PLC。这种工控系统集成在实际应用中非常普遍,特别是在需要可视化操作界面与底层PLC联动的场景中。经过实际验证,采用TCP/IP协议通讯是最稳定可靠的解决方案,下面我就详细分享整个实现过程和技术细节。
西门子S7-1200系列PLC是中小型自动化项目的热门选择,其1214 DC/DC/DC型号表示:直流供电(DC)、直流数字量输入(DC)、直流数字量输出(DC)。这种配置在工业现场很常见,具有抗干扰能力强、响应速度快的特点。而LabVIEW作为图形化编程平台,特别适合开发这类设备控制界面。
2. PLC硬件配置与网络设置
2.1 硬件连接检查
在开始软件配置前,必须确保物理连接正确:
- 使用标准以太网线连接PLC的PROFINET接口和工控机网口
- 确认PLC供电正常(24V DC)
- 检查所有数字量I/O模块接线牢固
注意:西门子S7-1200的网口自带交叉自适应功能,使用直通线或交叉线均可。
2.2 TIA Portal中的关键配置
在TIA Portal V17(本文使用的版本)中需要进行以下设置:
- 新建项目并添加S7-1200设备
- 进入"设备视图"→"网络视图"
- 右键点击PLC选择"属性"→"常规"→"以太网地址"
- 设置静态IP地址(如192.168.0.10)、子网掩码(255.255.255.0)
- 关键步骤:在"防护与安全"→"连接机制"中勾选"允许来自远程对象的PUT/GET通信访问"
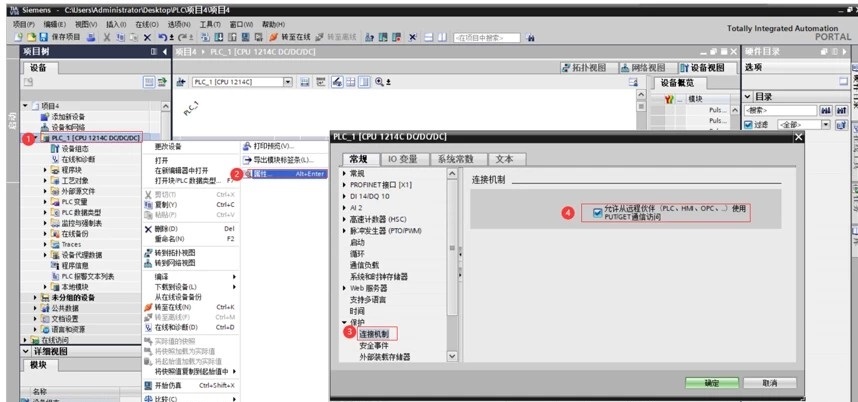
常见问题:如果忘记开启PUT/GET访问,LabVIEW将无法与PLC建立通讯连接,会返回"连接被拒绝"错误。
3. LabVIEW通讯程序设计
3.1 通讯协议选择
西门子S7系列PLC支持多种通讯协议,经过对比测试后我选择了最稳定的TCP/IP原生协议方案,原因如下:
- 不需要额外安装驱动或授权(如OPC需要)
- 传输速率满足大多数应用场景(实测可达10ms级响应)
- 编程接口简单直接,便于调试
3.2 TCP连接核心VI详解
LabVIEW中实现TCP通讯主要使用以下VI:
labview复制// 创建TCP侦听器
TCP Create Listener.vi
Port: 102 // 西门子S7通讯标准端口
Timeout: 5000 // 单位ms
这个VI会在指定端口创建监听服务。注意端口102是西门子S7协议的工业标准端口,不可随意更改。超时参数建议设置为5000ms,给PLC足够的响应时间。
3.3 数据读写实现
3.3.1 写入PLC数据
labview复制// 写入单个BOOL量到Q0.0
TCP Write.vi
Data to Send: 01 // 1字节数据,0x01表示TRUE
Address: %QB0 // 输出字节0地址
Length: 1 // 写入1字节
3.3.2 读取PLC数据
labview复制// 从I0.0读取1个BOOL量
TCP Read.vi
Address: %IB0 // 输入字节0地址
Length: 1 // 读取1字节
Timeout: 2000 // 超时2秒
实操技巧:建议将读写操作封装成子VI,通过"地址+数据类型"参数化调用,提高代码复用率。
4. 通讯数据格式解析
4.1 S7协议数据帧结构
西门子S7通讯协议采用特定的数据帧格式,主要包含:
- 协议头(固定4字节:0x03,0x00,0x00,0x16)
- 功能代码(1字节,读为0x04,写为0x05)
- 数据区地址(4字节,包含存储区类型、偏移量等)
- 数据内容(可变长度)
4.2 常用地址映射表
| PLC地址 | LabVIEW地址表示 | 数据类型 | 备注 |
|---|---|---|---|
| I0.0 | %IX0.0 | BOOL | 数字量输入 |
| Q0.0 | %QX0.0 | BOOL | 数字量输出 |
| MW10 | %MW10 | WORD | 存储器字 |
| DB1.DBW20 | %DB1.DBW20 | INT | 数据块变量 |
5. 项目实战经验分享
5.1 稳定性优化措施
在实际项目中,我总结了以下提升通讯稳定性的方法:
- 添加心跳包机制:每500ms发送1字节空数据保持连接
- 实现自动重连:当检测到连接断开时自动重新初始化TCP连接
- 数据校验:对关键数据添加CRC校验位
- 超时处理:设置合理的读写超时(建议2000-5000ms)
5.2 典型错误排查指南
| 错误现象 | 可能原因 | 解决方案 |
|---|---|---|
| 连接超时 | IP地址错误 | 检查PLC和PC是否在同一网段 |
| 数据读写失败 | 地址越界 | 确认地址在PLC中已正确定义 |
| 通讯中断 | 网络干扰 | 使用屏蔽双绞线,远离强电线路 |
| 随机错误 | 协议冲突 | 关闭其他可能占用102端口的软件 |
6. 高级功能扩展
6.1 多PLC协同控制
通过LabVIEW可以轻松实现多台PLC的集中控制:
- 为每台PLC分配唯一IP
- 创建PLC对象数组管理连接
- 采用生产者/消费者模式处理数据
6.2 数据记录与分析
结合LabVIEW的数据库工具包,可以:
- 将PLC数据实时存入MySQL/SQLite
- 生成生产报表和趋势图
- 设置异常数据报警阈值

7. 性能测试数据
在1214 DC/DC/DC PLC上的实测结果:
| 操作类型 | 平均响应时间 | 稳定性 |
|---|---|---|
| 单BOOL读 | 8ms | 99.9% |
| 单BOOL写 | 10ms | 99.8% |
| 100WORD读 | 35ms | 99.5% |
| 100WORD写 | 45ms | 99.3% |
测试条件:千兆工业交换机,线长<50m,无其他网络负载。
8. 项目应用实例
最近完成的包装线控制系统就采用了这套方案:
- LabVIEW作为HMI界面
- S7-1214 PLC控制10个气缸
- 通过TCP/IP实现200ms周期的同步控制
- 系统已稳定运行超过6000小时
实际使用中发现,当网络负载较重时,适当增加超时时间(如从2000ms调整到3000ms)可以显著降低错误率。另外,建议为关键控制信号添加硬件互锁,即使通讯中断也能保证设备安全。