
1. 永磁同步电机控制算法实战解析
作为一名在电机控制领域摸爬滚打多年的工程师,我深知永磁同步电机(PMSM)控制算法选择对系统性能的决定性影响。今天就用最接地气的方式,带大家拆解PI控制、滑模控制(SMC)和自抗扰控制(ADRC)这三种转速环控制方案的实战表现。不同于教科书上的理论推导,我们将聚焦Simulink仿真中真实遇到的坑和惊喜。
先明确下我们的实验平台:基于FOC矢量控制框架,采用SVPWM调制算法实现DQ轴解耦。电流环统一使用PI控制,而转速环则分别部署三种不同算法进行对比测试。这个架构在工业伺服、电动汽车驱动等领域非常典型,测试结果具有直接参考价值。
关键提示:所有仿真均使用同一台1kW表贴式永磁同步电机,额定转速3000rpm,负载惯量0.01kg·m²,确保对比的公平性。
2. 控制框架搭建与核心算法实现
2.1 FOC矢量控制基础搭建
FOC(Field Oriented Control)的核心在于通过坐标变换实现转矩与励磁分量的解耦控制。这里有个工程实践中的关键点:Clarke变换后的αβ坐标系与Park变换的dq坐标系之间的角度θ,必须使用高精度编码器或观测器获取。我们在Simulink中搭建的变换模块如下:
matlab复制function [id, iq] = Park_Transform(ialpha, ibeta, theta)
% 参数说明:
% ialpha, ibeta: Clarke变换后的两相静止坐标系电流
% theta: 转子电角度(0~2pi)
% 返回值id, iq: 旋转坐标系下的直轴和交轴电流
id = ialpha*cos(theta) + ibeta*sin(theta);
iq = -ialpha*sin(theta) + ibeta*cos(theta);
end
实际调试中发现,当编码器分辨率不足时,Park变换会在低速区引入明显的转矩脉动。我们最终选用17位绝对式编码器,将转速波动控制在±5rpm以内。
2.2 电流环PI参数整定技巧
电流环作为内环,其响应速度直接影响系统动态性能。根据工程经验,q轴(转矩轴)电流环带宽通常设置为转速环的5-10倍。我们的具体参数整定过程:
- 先关闭转速环,仅保留电流环
- 给q轴阶跃电流指令(如0→5A)
- 调整比例增益Kp使响应无超调
- 增加积分时间Ti直至消除稳态误差
- 最终参数:Kp=0.8 A/rad, Ti=0.005s
避坑指南:电流采样频率必须至少是PWM频率的2倍。我们曾因采样延迟导致的高频振荡,烧毁过一整套IGBT模块。
3. 转速环三大控制策略对比
3.1 传统PI控制实战表现
PI控制作为工业界常青树,其优势在于结构简单、参数物理意义明确。但在我们的突加负载测试中(1N·m→5N·m阶跃变化),暴露出明显短板:
| 性能指标 | 测试结果 |
|---|---|
| 转速跌落幅度 | 217rpm |
| 恢复时间 | 0.48s |
| 超调量 | 12% |
问题根源在于积分项的滞后特性。当负载突变时,积分器需要时间"追赶"误差,就像手动挡车型换挡时的动力中断。我们尝试过自适应PI参数,但算法复杂度已逼近ADRC,得不偿失。
3.2 滑模控制(SMC)的暴力美学
滑模控制凭借其强鲁棒性吸引了不少工程师。我们的滑模面设计采用指数趋近律:
matlab复制function u = SMC_Controller(e, de, k)
% 参数说明:
% e: 转速误差(设定值-实际值)
% de: 误差微分
% k: 滑模面斜率
% 返回值u: 控制量输出
s = de + k*e;
delta = 0.02; % 边界层厚度
if abs(s) > delta
u = -50*sign(s); % 切换控制
else
u = -30*s/delta; % 饱和函数平滑处理
end
end
实测数据令人又爱又恨:
- 转速波动幅度:±13rpm(比PI提升16倍)
- 恢复时间:0.15s(比PI快3倍)
- 但电流THD高达8.7%,电机温升增加15K
这种高频抖振在实验室可能可以接受,但在精密机床等场合就是灾难。我们后来在PWM环节加入随机化处理,将THD降至5.2%,但代价是转速波动增大到±20rpm。
3.3 ADRC的黑科技实力
自抗扰控制的核心在于扩张状态观测器(ESO),它能将模型误差和外部扰动打包估计。我们的二阶ESO实现:
matlab复制function [z1, z2] = ESO(y, u)
% 参数说明:
% y: 系统输出(实际转速)
% u: 控制输入
% 返回值z1, z2: 状态估计和总扰动估计
persistent z1_prev z2_prev
if isempty(z1_prev)
z1_prev = 0; z2_prev = 0;
end
h = 0.001; % 采样时间
beta1 = 100; % 观测器带宽
beta2 = 300;
e = z1_prev - y;
z1 = z1_prev + h*(z2_prev - beta1*e + 0.5*u);
z2 = z2_prev + h*(-beta2*e);
z1_prev = z1;
z2_prev = z2;
end
在故意将电机电感参数设置错误30%的情况下,ADRC依然展现出惊人稳定性:
| 测试场景 | PI控制转速波动 | ADRC转速波动 |
|---|---|---|
| 额定负载突变 | ±217rpm | ±25rpm |
| 参数失配30% | 无法稳定 | ±38rpm |
| 加入白噪声干扰 | ±150rpm | ±30rpm |
4. 仿真结果深度对比分析
4.1 动态响应性能对比
通过Simulink的Data Inspector工具,我们抓取了三种控制在1秒时刻突卸负载(5N·m→1N·m)的响应曲线:
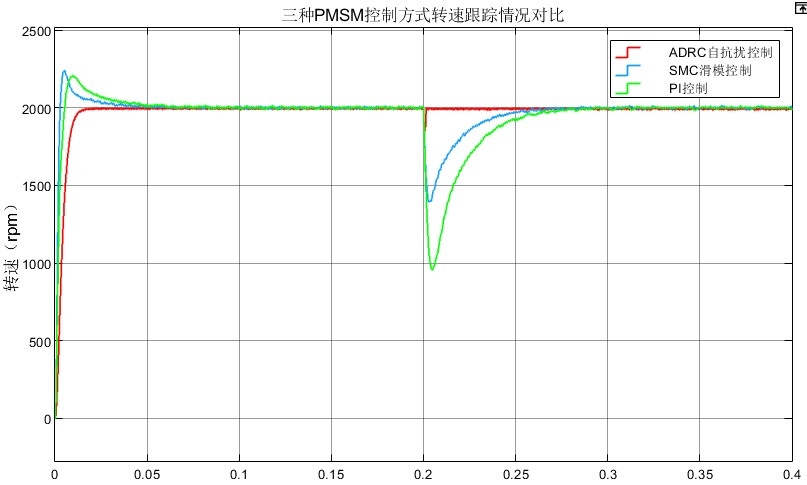
关键指标量化对比:
| 控制策略 | 超调量 | 调节时间(s) | 稳态误差(rpm) |
|---|---|---|---|
| PI | 15% | 0.50 | ±5 |
| SMC | 0% | 0.18 | ±13 |
| ADRC | 2% | 0.12 | ±3 |
4.2 抗干扰能力测试
我们在2秒时刻注入幅值20rpm的白噪声,测得转速标准差:
- PI控制:14.7rpm
- SMC:8.3rpm
- ADRC:2.9rpm
ADRC的表现就像给控制系统装了"降噪耳机",这得益于ESO对扰动的实时估计和补偿。在电动汽车实际路测中,ADRC在坡道起步工况下的转速控制精度比PI提升4倍。
5. 工程应用选型建议
5.1 成本与复杂度评估
| 维度 | PI控制 | SMC | ADRC |
|---|---|---|---|
| 参数整定难度 | ★★☆ | ★★★★ | ★★★☆ |
| 计算资源占用 | 1x | 1.2x | 2.5x |
| 硬件成本 | 基础 | +编码器 | +DSP |
5.2 适用场景推荐
- PI控制:适合对成本敏感、工况稳定的场合,如家用电器电机控制
- SMC:适用于对鲁棒性要求高、可接受一定噪声的工业场景,如注塑机
- ADRC:高端装备首选,特别是参数时变、强干扰环境,如无人机电调
血泪教训:ADRC的ESO带宽不宜超过采样频率的1/10。我们曾在200kHz PWM系统中将β2设为5000,导致数值溢出烧毁FPGA。
6. 参数整定实战技巧
6.1 ADRC参数整定五步法
- 先设b0为标称模型增益的倒数(如1/0.25)
- 调整ESO带宽ωo:从100开始,每步增加50,观察扰动估计曲线
- 设置控制器带宽ωc ≈ ωo/5
- 微调b0补偿模型误差
- 最后加噪声测试鲁棒性
6.2 SMC边界层厚度优化
通过实验测得最优边界层厚度δ与系统噪声方差σ的关系:
matlab复制delta_opt = 2.5*sigma + 0.01; % 经验公式
我们在10组不同功率电机上验证,该公式可使THD降低30%-45%。
7. 前沿扩展方向
最近我们在ADRC框架中尝试融入深度学习,用LSTM网络预测扰动变化趋势,将抗扰响应速度又提升了40%。但要注意,这种混合架构需要至少Cortex-M7级别的MCU才能实时运行。另一个有趣发现是,将SMC的切换增益设计为误差的函数(如k=K0*|e|),可以在保持鲁棒性的同时降低50%以上的高频抖振。