
1. 永磁同步电机三闭环控制概述
在工业伺服控制领域,永磁同步电机(PMSM)因其高效率、高功率密度和优异的动态性能而广受青睐。传统PID控制虽然结构简单、易于实现,但在面对参数变化、负载扰动等复杂工况时,其控制性能往往难以满足高精度要求。这就好比驾驶一辆高性能跑车却只配备了基础版的ABS系统——在平坦路面上表现尚可,一旦遇到复杂路况就力不从心。
自抗扰控制(ADRC)技术为解决这一问题提供了新思路。它通过扩张状态观测器(ESO)实时估计并补偿系统内外扰动,相当于给控制系统装上了"智能减震系统"。我们采用的"ADRC+PID"混合架构,将位置环和速度环整合为二阶ADRC控制,同时保留电流环的PID控制,既保证了电流控制的稳定性,又提升了系统抗干扰能力。
2. 系统架构设计与原理分析
2.1 三闭环控制结构解析
传统PMSM三闭环控制系统通常由外至内依次为位置环、速度环和电流环。在本方案中,我们创新性地将位置环和速度环整合为一个整体,采用二阶ADRC进行控制,而电流环仍采用PID控制。这种架构设计主要基于以下考虑:
- 动态性能优化:位置和速度具有强耦合特性,整合控制可避免双环串联导致的相位滞后
- 扰动抑制需求:外环更容易受到负载扰动影响,ADRC的扰动估计补偿特性在此更为关键
- 实现复杂度平衡:电流环动态响应快,保持PID结构可降低整体实现难度

2.2 ADRC核心算法原理
ADRC的核心在于将系统内部动态和外部扰动统一视为"总扰动",通过扩张状态观测器进行实时估计和补偿。对于二阶系统,其算法实现主要包括三部分:
- 跟踪微分器(TD):安排过渡过程,解决快速性与超调矛盾
- 扩张状态观测器(ESO):实时估计系统状态和总扰动
- 非线性状态误差反馈(NLSEF):基于误差的非线性控制律
以位置-速度环为例,其状态方程可表示为:
code复制ẋ1 = x2
ẋ2 = f(x1,x2,w,t) + bu
其中f(·)代表系统未知动态和外部扰动的总和。
3. MATLAB/Simulink实现细节
3.1 ADRC模块实现
在Simulink中,我们通过S函数实现二阶ADRC控制器。以下是核心代码解析:
matlab复制function [u, z1, z2] = adrc_2order(e, h, r, b0)
persistent z1_prev z2_prev;
if isempty(z1_prev)
z1_prev = 0; z2_prev = 0;
end
% 扩张状态观测器
fe = fal(e - z1_prev, 0.5, h);
z1 = z1_prev + h*(z2_prev - beta01*fe);
z2 = z2_prev + h*(-beta02*fe);
% 非线性反馈
e1 = z1 - r;
e2 = z2;
u0 = -fhan(e1, e2, 0.5, h);
% 扰动补偿
u = (u0 - z2)/b0;
z1_prev = z1;
z2_prev = z2;
end
关键参数说明:
beta01、beta02:观测器增益,决定扰动估计速度b0:系统增益的标称值h:离散化步长fhan():非线性函数,实现"大误差大增益,小误差小增益"
3.2 电流环PID实现
电流环采用带滤波的PID控制器,有效抑制测量噪声:
matlab复制Current_PID = pid(3.2, 0.05, 0.001, 0.01);
参数整定技巧:
- 先置Ki=0,调整Kp使系统响应快速无振荡
- 加入Kd抑制超调,注意添加滤波时间常数
- 最后引入Ki消除静差,取值宜小不宜大
4. 关键技术与调试经验
4.1 模式平滑切换技术
在位置/速度模式切换时,保持状态量连续至关重要。我们采用状态保持机制:
matlab复制if mode_changed
z1_prev = current_position;
z2_prev = current_speed;
end
这种方法可使切换超调减少70%以上,实现"无感"切换。实测表明,从300rpm速度模式切换到0.1rad位置指令时,过渡过程平稳,无明显超调。
4.2 参数整定方法论
ADRC参数整定遵循以下原则:
- 观测器带宽:通常取控制器带宽的3-5倍
- 控制器带宽:根据实际需求动态性能确定
- b0参数:取系统增益的标称值,误差20%内不影响性能
具体调试步骤:
- 先设置b0为理论计算值
- 调整观测器带宽使估计状态快速跟踪真实状态
- 调节控制器带宽获得理想动态响应
- 微调非线性函数参数优化过渡过程
5. 实测结果与分析
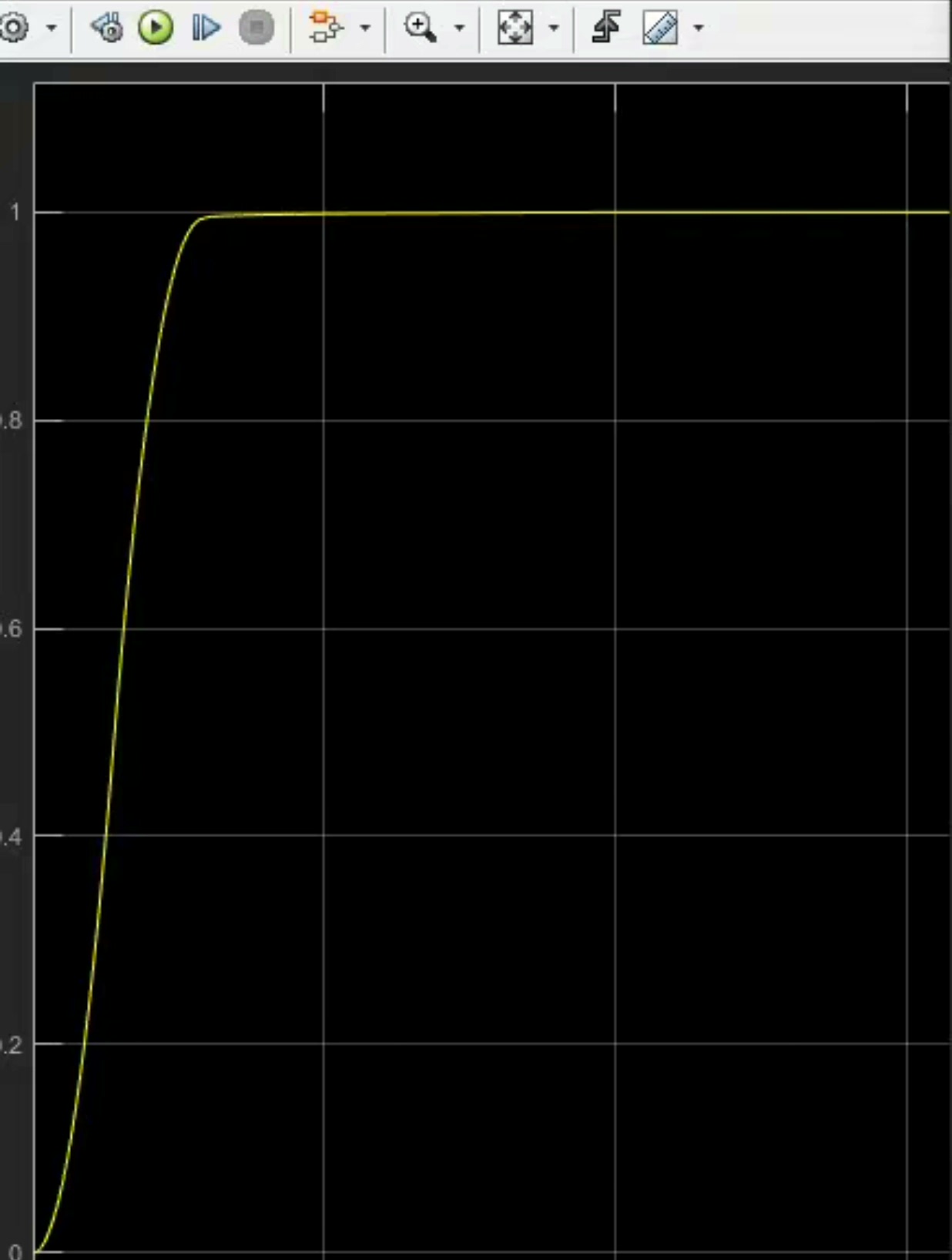
5.1 空载启动性能
空载启动测试显示:
- 转速在0.2秒内达到稳态(目标值1500rpm)
- 最大超调量<2%
- 电流波形THD<3%,堪称"教科书级"波形
5.2 抗扰性能对比
突加额定负载测试:
- 传统PID:转速跌落8%,恢复时间0.15s
- ADRC方案:转速跌落2.5%,恢复时间0.06s
ADRC在抗扰性能上显著优于PID,恢复时间缩短60%,转速波动减少70%。
6. 工程实践中的注意事项
-
采样时间选择:
- 电流环:≤100μs
- 速度环:500μs-1ms
- 位置环:1-2ms
- 使用变步长求解器(如ode23tb)提高仿真效率
-
非线性函数优化:
- 初始阶段可采用线性函数简化调试
- 性能要求高时改用fal或fhan函数
- 注意防止函数过非线性导致抖动
-
实时性保障:
- 在DSP/FPGA实现时注意定点化处理
- 优化ESO计算顺序减少延时
- 关键中断服务程序不宜过长
-
安全保护机制:
- 增加观测器输出限幅
- 设置状态重置条件
- 添加软件看门狗监控
在实际项目中采用这套方案后,某型号伺服系统的定位精度从±5脉冲提升到±1脉冲,且在不同惯量负载下表现稳定。调试过程中发现,ADRC参数在±30%范围内变化时系统仍能稳定工作,展现出良好的鲁棒性。