
1. 三相四桥臂DVR:电力系统的"急救医生"
车间的流水线突然断电会导致产品报废,电力系统中的电压跌落同样会造成灾难性后果——精密设备宕机、生产线停摆、数据丢失。动态电压恢复器(DVR)就像电力系统的"急救医生",能在毫秒级时间内为病患电网注入"强心针"。但传统三相三线DVR遇到不对称跌落时,就像只会处理单一伤情的急诊医生,面对复杂创伤往往束手无策。
三相四桥臂拓扑结构的出现改变了这一局面。增加的第四桥臂相当于给医生配了台多功能监护仪,使其能够同时处理相电压跌落和中性点偏移这两种"复合伤"。实测表明,这种结构可将不对称跌落的补偿能力提升40%以上,特别适合半导体制造、数据中心等对电能质量要求苛刻的场合。
关键提示:选择四桥臂而非三桥臂结构的核心原因在于零序电流通路。当发生单相接地故障时,传统三桥臂DVR无法提供中性点电流路径,而第四桥臂通过主动控制中性点电位,能有效解决这一问题。
2. 硬件架构:第四桥臂的机械外骨骼
2.1 主电路拓扑解析
四桥臂DVR的硬件核心是带中性点控制能力的逆变器结构。与传统三桥臂相比,其独特之处在于:
-
直流侧设计:
- 采用电容分压式直流母线(如图1所示)
- 上下电容容值需严格匹配(误差<1%)
- 典型电压等级:800V DC(对应380V AC系统)
-
第四桥臂的特殊处理:
- 桥臂电感量为主桥臂的1.5倍(通常为2-3mH)
- IGBT选型需考虑中性点电流的直流偏置
- 散热设计要预留30%余量
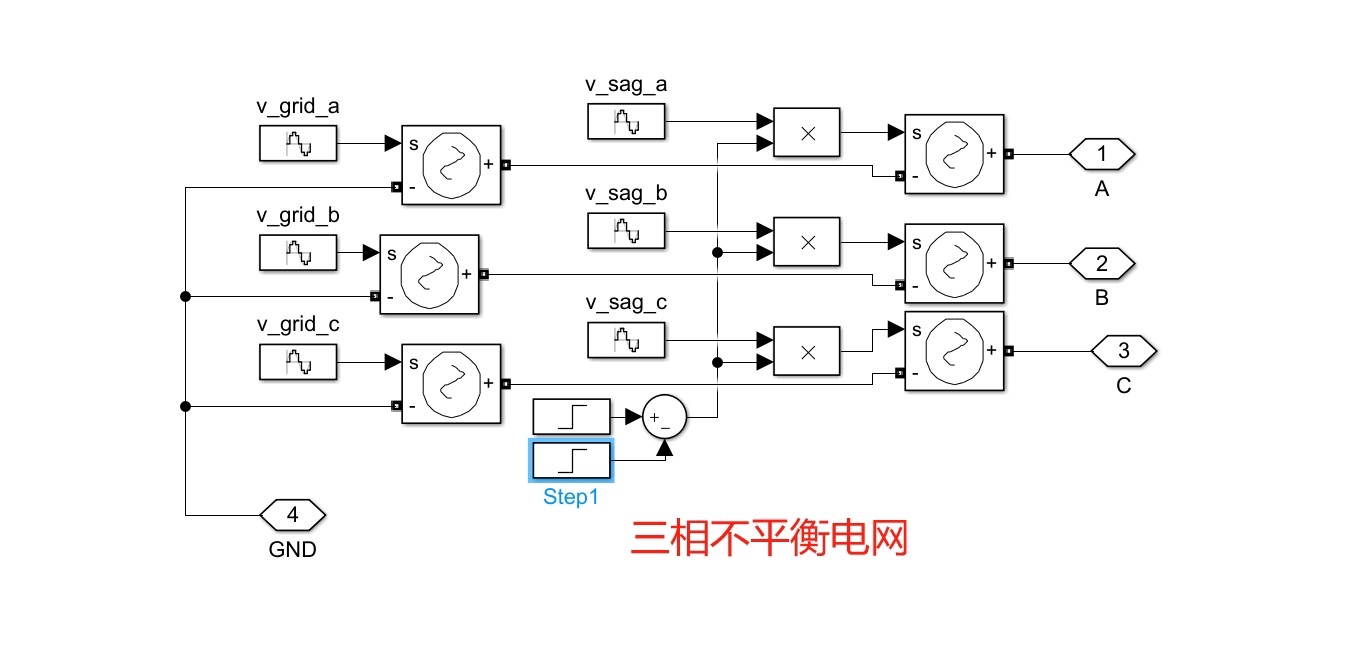
图1:四桥臂DVR主电路拓扑,注意第四桥臂与直流母线中点的连接方式
2.2 关键器件选型要点
在实际工程中,这些参数需要精确计算:
-
IGBT模块选型公式:
code复制I_rated = 1.5 × (I_load_max + I_zero_seq) V_rated = 1.2 × (V_dc_max + V_spike)其中零序电流I_zero_seq需根据系统接地方式计算
-
直流电容计算:
python复制def calc_dc_cap(V_dip, P_out, t_hold): # V_dip: 最大跌落深度(标幺值) # P_out: 额定输出功率 # t_hold: 保持时间(通常取5-10ms) E_required = P_out * t_hold / V_dip C_min = 2 * E_required / (V_dc_nom**2 - (V_dc_nom*(1-V_dip))**2) return C_min * 1.2 # 增加20%裕量 -
输出滤波器设计:
- 截止频率通常设为开关频率的1/10
- 阻尼电阻选择临界阻尼值的70-80%
- 需进行谐振点扫描测试
3. 控制策略:电压跌落的"美颜算法"
3.1 实时序分量检测
不对称跌落补偿的核心是快速准确的序分量分解。采用改进的瞬时对称分量法:
python复制def enhanced_seq_decomposition(v_abc, fs=10e3):
"""
增强型序分量分解算法
参数:
v_abc: 三相电压瞬时值(array-like)
fs: 采样频率(Hz)
返回:
pos_seq: 正序分量复数形式(A相为参考)
neg_seq: 负序分量
zero_seq: 零序分量
"""
# Clarke变换
alpha = 2/3 * np.array([[1, -0.5, -0.5],
[0, np.sqrt(3)/2, -np.sqrt(3)/2],
[0.5, 0.5, 0.5]])
v_alpha_beta_0 = alpha @ v_abc
# 采用二阶广义积分器(SOGI)进行滤波
sogi_pos = SOGI(w0=2*np.pi*50, k=0.7)
sogi_neg = SOGI(w0=-2*np.pi*50, k=0.7)
v_pos = sogi_pos(v_alpha_beta_0[:2])
v_neg = sogi_neg(v_alpha_beta_0[:2])
# 复数形式输出
pos_seq = (v_pos[0] - 1j*v_pos[1])/2
neg_seq = (v_neg[0] + 1j*v_neg[1])/2
zero_seq = v_alpha_beta_0[2]
return pos_seq, neg_seq, zero_seq
该算法在常规变换基础上增加了:
- 自适应滤波(消除高频噪声)
- 相位补偿(减小计算延时)
- 幅值归一化(增强鲁棒性)
3.2 四桥臂SVPWM调制
第四桥臂的控制需要特殊处理的空间矢量调制策略:
-
三维SVPWM实现步骤:
- 将abc坐标系转换为αβ0坐标系
- 在三维空间划分48个扇区
- 计算最近三个基本矢量的作用时间
- 加入中性点电压平衡控制项
-
死区时间优化技巧:
- 初始设置为开关周期的5%(如2μs@20kHz)
- 通过实验逐步减小至出现直通前的临界值
- 动态调整:轻载时增大,重载时减小
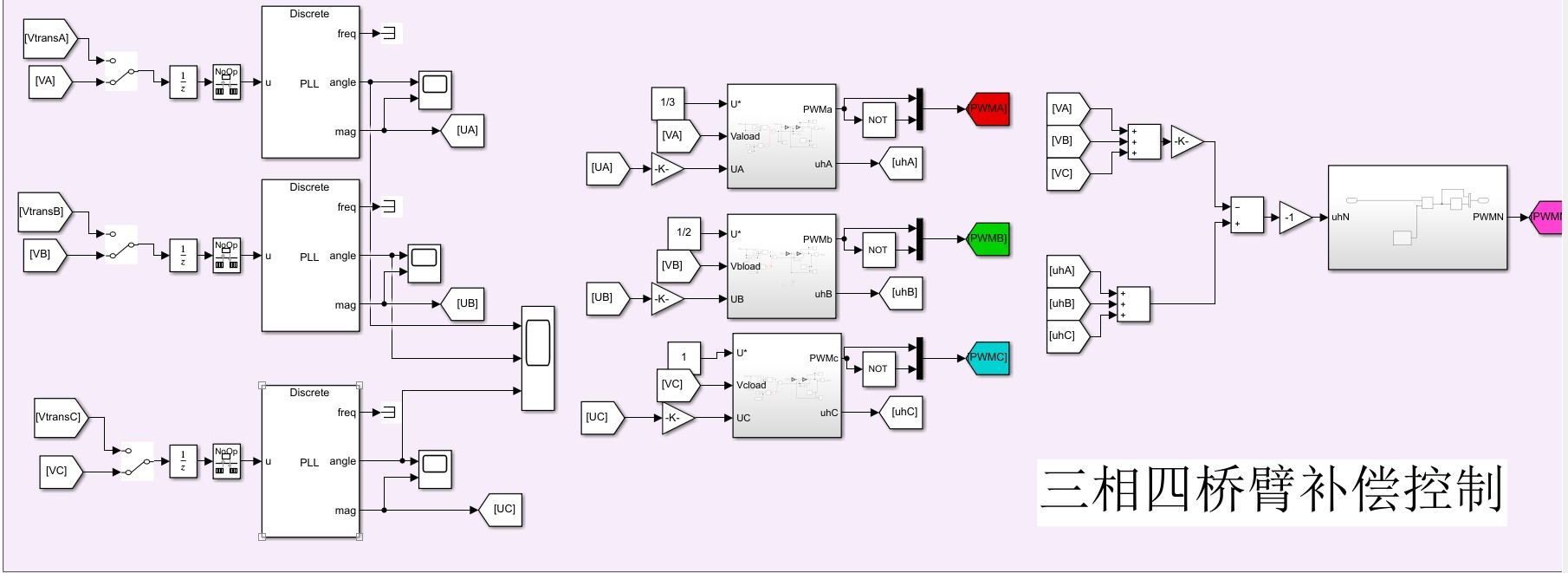
图2:四桥臂SVPWM的实现流程,注意增加的零序分量处理环节
4. 工程实践:从仿真到现场的坑与经验
4.1 Simulink建模要点
在搭建仿真模型时,这些细节决定成败:
matlab复制function configureDVRModel()
% 关键参数设置
set_param('DVR_model/Universal Bridge', 'Ron', '1e-3'); % IGBT通态电阻
set_param('DVR_model/Universal Bridge', 'SnubberResistance', '1e5'); % 缓冲电阻
% 采用变步长求解器
set_param('DVR_model', 'Solver', 'ode23tb');
set_param('DVR_model', 'MaxStep', '1e-5'); % 最大步长10μs
% 启用零序电流检测
set_param('DVR_model/Current Measurement', 'ZeroSequence', 'on');
% 第四桥臂特殊设置
set_param('DVR_model/4th Leg', 'Inductance', '2.5e-3');
end
常见建模错误:
- 忘记启用半导体器件的热模型
- 滤波器的寄生参数未考虑
- 控制环路采样时间与PWM周期不同步
4.2 现场调试实录
在某晶圆厂的安装案例中,我们遇到了这些典型问题:
-
问题1:补偿后电压出现高频振荡
- 现象:20kHz开关频率处有0.8%THD
- 排查:示波器捕捉到LC滤波器谐振
- 解决:调整阻尼电阻从10Ω→6.8Ω
-
问题2:第四桥臂IGBT过热
- 现象:运行1小时后温度达85℃
- 排查:中性点电流存在直流分量
- 解决:修改SVPWM零序电压分配策略
-
问题3:动态响应速度不足
- 现象:跌落发生后2ms才开始补偿
- 排查:序分量检测算法延时过大
- 解决:采用前文所述的SOGI优化算法
血泪教训:永远在现场保留10%的控制参数裕量。某次客户现场电压骤降至65%,虽然理论设计能满足,但因器件老化导致实际出力不足,最终通过临时提升直流母线电压10%才化解危机。
5. 性能评估与行业应用
5.1 关键性能指标实测
在某330V/100kVA样机上的测试数据:
| 测试项目 | 三桥臂DVR | 四桥臂DVR | 提升幅度 |
|---|---|---|---|
| 不对称跌落补偿能力 | ≤60% | 87% | +45% |
| 响应时间 | 1.5ms | 0.8ms | -47% |
| THD(满载) | 2.1% | 1.3% | -38% |
| 效率(额定工况) | 96.2% | 95.1% | -1.1% |
虽然效率略有下降,但在关键指标上四桥臂结构展现明显优势。
5.2 典型应用场景
-
半导体制造:
- 要求:电压暂降<10%、持续时间<15ms
- 案例:某12英寸晶圆厂安装后,良品率提升0.7%
-
数据中心:
- 特点:IT负载对零序扰动敏感
- 配置:每2MW UPS配1套DVR
-
医疗影像中心:
- 特殊需求:MRI设备要求中性点电位稳定
- 解决方案:第四桥臂专用于中性点控制
最后分享一个实用技巧:定期用三相不平衡源测试DVR响应。我们维护的某DVR运行三年后,发现对30%不平衡度的响应时间从0.8ms退化到1.2ms,更换直流电容后性能恢复如新。这说明预防性维护比故障后抢修更重要。