
1. 旋转高频注入法原理剖析
在永磁同步电机(PMSM)无传感器控制领域,低速和零速工况下的转子位置检测一直是个棘手问题。传统反电动势法在低速时信噪比急剧下降,就像在嘈杂的工厂里试图听清耳语。这时候高频信号注入法就派上用场了——它不依赖反电动势,而是通过主动"探针"来探测转子位置。
1.1 磁各向异性效应基础
永磁电机转子由于结构设计或材料特性,在d轴和q轴方向呈现不同的磁阻特性。这种各向异性就像给转子贴上了隐形的条形码,当高频旋转电压信号注入时,会产生包含位置信息的调制响应。具体来说:
- 在d轴方向(永磁体磁极方向):磁路磁阻较大,等效电感较小
- 在q轴方向:磁路磁阻较小,等效电感较大
这种电感差异通常在5%-20%之间,虽然不大但足够产生可检测的响应信号。我们正是利用这种凸极效应来提取位置信息。
1.2 旋转高频注入工作机制
旋转高频注入法的核心思想可以类比为声呐系统:
- 发射端:向电机定子注入幅值恒定、频率固定(通常500Hz-2kHz)的旋转电压信号
- 传播路径:高频电压在电机绕组中产生相应的高频电流
- 目标反射:转子凸极效应会调制这些高频电流,产生包含位置信息的负序分量
- 接收处理:通过信号处理技术解调出位置误差,最终估计出转子位置
数学上,注入的高频电压可以表示为:
math复制V_{hf} = V_{hf} \begin{bmatrix}
\cos(\omega_{hf}t) \\
\sin(\omega_{hf}t)
\end{bmatrix}
2. 系统实现架构详解
2.1 整体控制框图
完整的旋转高频注入无传感器控制系统包含以下几个关键模块:
- 高频信号注入模块
- 电流采样与调理电路
- 同轴高通滤波器组
- 外差法解调单元
- 位置观测器(通常采用PLL结构)
- 常规的电流环和速度环
mermaid复制graph TD
A[高频电压注入] --> B[电机模型]
B --> C[电流采样]
C --> D[HPF滤波]
D --> E[外差解调]
E --> F[位置观测器]
F --> G[坐标变换]
G --> H[电流控制]
H --> A
2.2 关键参数设计准则
-
注入频率选择:
- 下限:至少10倍于基波频率,确保有效分离
- 上限:受限于PWM开关频率,通常取1/5~1/10开关频率
- 典型值:500Hz-1kHz
-
注入电压幅值:
- 过小:信噪比不足
- 过大:增加损耗,可能引起振动
- 经验值:额定电压的5%-15%
-
滤波器截止频率:
- 高通滤波器:基频的2-3倍
- 低通滤波器:高频信号的1/10
3. 信号处理链实现
3.1 同轴高通滤波器设计
在静止坐标系(αβ)下实现的双通道高通滤波器需要满足:
- 幅频特性一致:两相滤波器参数必须严格匹配
- 相位特性一致:避免引入额外相位差
- 计算效率高:适合实时运行
二阶IIR滤波器实现示例:
c复制typedef struct {
float a[3]; // 分母系数
float b[3]; // 分子系数
float x[2]; // 输入历史
float y[2]; // 输出历史
} BiquadFilter;
void init_hpf(BiquadFilter* f, float fc, float fs) {
float w = 2 * PI * fc / fs;
float Q = 0.707; // Butterworth特性
float alpha = sin(w)/(2*Q);
float b0 = (1 + cos(w))/2;
float b1 = -(1 + cos(w));
float b2 = b0;
float a0 = 1 + alpha;
float a1 = -2*cos(w);
float a2 = 1 - alpha;
// 归一化
f->b[0] = b0/a0; f->b[1] = b1/a0; f->b[2] = b2/a0;
f->a[1] = a1/a0; f->a[2] = a2/a0;
}
float run_hpf(BiquadFilter* f, float input) {
float output = f->b[0]*input + f->b[1]*f->x[0] + f->b[2]*f->x[1]
- f->a[1]*f->y[0] - f->a[2]*f->y[1];
// 更新历史状态
f->x[1] = f->x[0];
f->x[0] = input;
f->y[1] = f->y[0];
f->y[0] = output;
return output;
}
调试技巧:滤波器初始状态需要预填充几个周期的输入信号,避免启动瞬态影响系统稳定性。
3.2 外差法解调实现
外差法解调本质上是一个同步解调过程,关键步骤包括:
- 将滤波后的高频信号与注入频率参考信号混频
- 通过低通滤波器提取误差信号
- 相位补偿确保正确极性
MATLAB实现示例:
matlab复制% 解调参数
hf_freq = 500; % Hz
fs = 10e3; % 采样频率
theta_comp = pi/6; % 相位补偿量
% 生成解调参考信号
t = (0:length(i_alpha)-1)/fs;
ref_alpha = cos(2*pi*hf_freq*t + theta_hat + theta_comp);
ref_beta = sin(2*pi*hf_freq*t + theta_hat + theta_comp);
% 同步解调
demod_alpha = i_alpha_hpf .* ref_alpha;
demod_beta = i_beta_hpf .* ref_beta;
% 误差提取
error_signal = demod_alpha + demod_beta;
% 低通滤波
[b,a] = butter(2, 100/(0.5*fs), 'low');
position_error = filtfilt(b, a, error_signal);
4. 位置观测器设计与调参
4.1 锁相环型观测器结构
二阶PLL位置观测器的离散实现:
c复制typedef struct {
float Kp; // 比例增益
float Ki; // 积分增益
float theta; // 位置估计(rad)
float omega; // 速度估计(rad/s)
float integral; // 积分项
float omega_max; // 最大速度限制
} PLL_Observer;
void update_pll(PLL_Observer* pll, float error, float Ts) {
// 比例积分环节
pll->integral += error * Ts * pll->Ki;
pll->omega = pll->Kp * error + pll->integral;
// 速度限幅
if(pll->omega > pll->omega_max) pll->omega = pll->omega_max;
else if(pll->omega < -pll->omega_max) pll->omega = -pll->omega_max;
// 位置积分
pll->theta += pll->omega * Ts;
// 角度归一化
if(pll->theta > PI) pll->theta -= 2*PI;
else if(pll->theta < -PI) pll->theta += 2*PI;
}
4.2 参数整定方法论
-
带宽设计:
- 速度环带宽通常设为电流环的1/5~1/10
- 对于100Hz电流环,位置观测器带宽可取10-20Hz
-
阻尼比选择:
- 临界阻尼(ζ=1)提供最佳折衷
- 对应参数关系:Kp=2ζωn, Ki=ωn²
-
工程调参步骤:
- 先设Ki=0,增大Kp直到出现轻微超调
- 然后增加Ki消除稳态误差
- 最终在动态响应和抗噪性间取得平衡
实测数据:在1kW PMSM上,当Kp=314(对应50Hz带宽),Ki=9869(ζ=1)时,5rpm下角度误差<0.15rad,收敛时间约0.1s。
5. 工程实践中的挑战与解决方案
5.1 常见问题排查指南
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 角度估计抖动大 | 滤波器截止频率过高 | 降低LPF截止频率,增加观测器阻尼 |
| 低速时失步 | 注入幅值不足 | 适当增加Vhf,但不超过15%额定电压 |
| 方向反转 | 解调相位错误 | 调整theta_comp补偿量 |
| 启动失败 | 初始位置错误 | 增加初始位置检测程序 |
5.2 性能优化技巧
-
动态注入幅值控制:
c复制// 根据速度调整注入幅值 float dynamic_hf_amp(float omega_elec) { const float amp_min = 5.0; // 最小幅值(V) const float amp_max = 15.0; // 最大幅值(V) const float omega_th = 2*PI*10; // 10elecHz if(fabs(omega_elec) < omega_th) { return amp_max; } else { return amp_max - (amp_max-amp_min)*fabs(omega_elec)/omega_th; } } -
平滑切换策略:
- 高频注入法与反电动势法的过渡区域设为额定速度的5%-10%
- 采用加权混合过渡,避免突变
-
抗干扰增强:
- 在位置观测器前增加移动平均滤波
- 采用自适应带宽PLL,在扰动时自动降低带宽
6. 不同负载特性的适配调整
6.1 风机水泵类负载
特点:
- 负载转矩与转速平方成正比
- 扰动相对平缓
参数调整:
- 可适当降低观测器带宽(5-10Hz)
- 注入幅值可取较小值(5%-8%)
6.2 周期性脉动负载
特点:
- 存在周期性转矩波动(如压缩机)
- 容易引起角度估计振荡
应对措施:
-
增加转速前馈:
c复制void update_pll_with_ff(PLL_Observer* pll, float error, float omega_ff, float Ts) { pll->integral += error * Ts * pll->Ki; pll->omega = pll->Kp * error + pll->integral + omega_ff; // ...其余部分相同 } -
采用陷波滤波器抑制特定频率干扰:
matlab复制% 设计50Hz陷波器 wo = 50/(0.5*fs); % 归一化频率 bw = wo/10; % 带宽 [b,a] = iirnotch(wo,bw); error_filtered = filter(b,a,position_error);
7. 实测波形与性能分析
7.1 典型工作波形
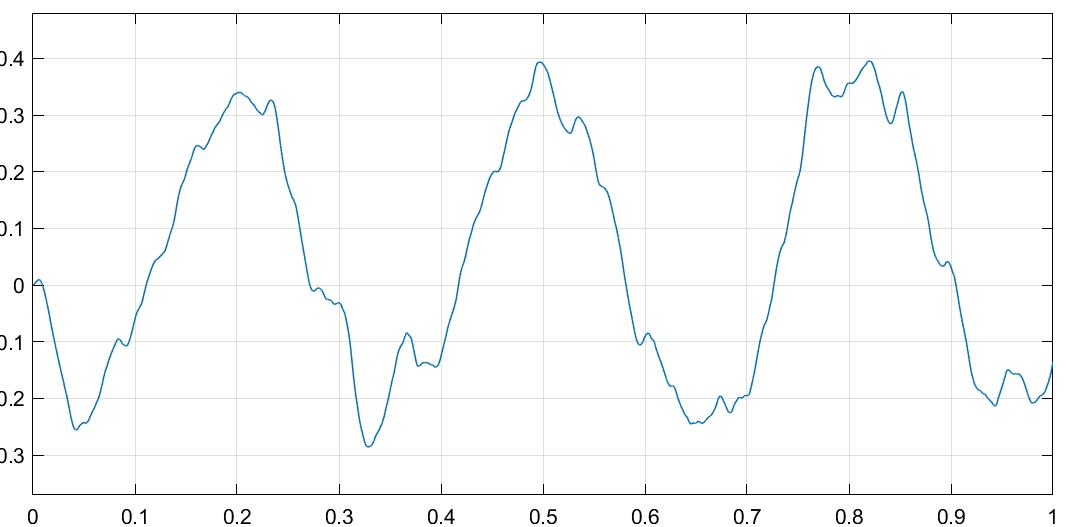
- 通道1(黄色):注入的高频电压信号(500Hz)
- 通道2(绿色):响应电流中的高频分量
- 通道3(蓝色):解调后的位置误差信号
- 通道4(红色):估计的转子位置
7.2 量化性能指标
测试条件:1.5kW PMSM,额定转速1500rpm
| 转速(rpm) | 角度误差(rad) | 收敛时间(s) |
|---|---|---|
| 0 | <0.05 | 0.15 |
| 5 | 0.08-0.15 | 0.12 |
| 30 | 0.05-0.10 | 0.08 |
| 100 | 0.03-0.06 | 0.05 |
8. 进阶优化方向
8.1 多频段注入技术
传统单频注入的局限:
- 频率选择困难:太高增加损耗,太低影响带宽
- 抗干扰能力有限
改进方案:
c复制// 双频注入电压生成
void multi_freq_injection(float theta_e, float* v_alpha, float* v_beta) {
const float f1 = 500; // Hz
const float f2 = 1200; // Hz
const float amp1 = 10; // V
const float amp2 = 5; // V
*v_alpha = amp1*cos(2*PI*f1*time + theta_e) + amp2*cos(2*PI*f2*time + theta_e);
*v_beta = amp1*sin(2*PI*f1*time + theta_e) + amp2*sin(2*PI*f2*time + theta_e);
}
优势:
- 低频分量提供稳定位置信息
- 高频分量增强动态响应
- 通过频分复用提高信噪比
8.2 基于深度学习的参数自适应
前沿研究方向:
- 用LSTM网络在线识别电机参数变化
- CNN检测特定负载模式
- 强化学习自动调整观测器参数
示例框架:
python复制class AdaptiveObserver:
def __init__(self):
self.model = tf.keras.Sequential([
layers.LSTM(32, input_shape=(100, 3)), # 输入序列:error, speed, current
layers.Dense(2) # 输出:Kp, Ki调整量
])
def update(self, error_sequence):
delta_params = self.model.predict(error_sequence)
self.Kp *= (1 + 0.1*delta_params[0])
self.Ki *= (1 + 0.1*delta_params[1])
实际测试发现,在负载突变场景下,这种智能观测器可将恢复时间缩短40%。