
1. 永磁同步电机弱磁控制技术背景
永磁同步电机(PMSM)作为现代电力驱动系统的核心部件,其高性能控制一直是学术界和工业界的研究热点。在电动汽车驱动领域,电机需要满足从低速大扭矩到高速巡航的全工况需求,这就对控制算法提出了严峻挑战。传统控制方法在基速以上运行时,由于逆变器输出电压限制,往往难以实现稳定的高速运行。
我曾在某新能源车企参与驱动系统开发时,亲历过弱磁控制调参的痛苦过程。当车辆时速超过100km/h后,电机转速进入弱磁区,若控制参数稍有不当,就会导致转矩波动加剧、电流畸变等问题。这段经历让我深刻认识到:弱磁控制不仅是理论课题,更是工程实践中必须攻克的难题。
2. MTPA-MTPV控制策略原理剖析
2.1 最大转矩电流比(MTPA)控制
MTPA控制的本质是解决"如何用最小的电流产生最大转矩"这一工程优化问题。从数学角度看,这可以转化为在转矩方程约束下的电流幅值最小化问题。
以表贴式PMSM为例,其电磁转矩方程为:
Te = 1.5p[ψf iq + (Ld - Lq)id iq]
通过构建拉格朗日函数,我们可以推导出MTPA轨迹的解析表达式:
id = (ψf/(2(Lq-Ld))) - sqrt((ψf/(2(Lq-Ld)))^2 + iq^2)
注意:对于内置式PMSM(Ld≠Lq),此关系成立;但对表贴式电机(Ld≈Lq),需采用简化处理。
2.2 最大转矩电压比(MTPV)控制
当电机进入高速区,电压极限椭圆不断收缩,此时需要切换到MTPV控制模式。其核心思想是在电压约束条件下最大化输出转矩。
电压约束方程可表示为:
(ωLq iq)^2 + (ωLd id + ωψf)^2 ≤ Vlim^2
通过求解该约束条件下的转矩极值,可以得到MTPV工作点。在实际工程中,我们通常采用离线计算+在线查表的方式实现快速求解。
3. 查表法实现关键技术
3.1 工作点离线计算
建立完整的查表数据库需要经过以下步骤:
- 电机参数扫描测试(包括空载反电势、电感参数等)
- 离散化工作区间(通常转矩步长1Nm,转速步长100rpm)
- 对每个工作点求解MTPA/MTPV最优解
- 数据有效性验证(检查电流/电压约束)
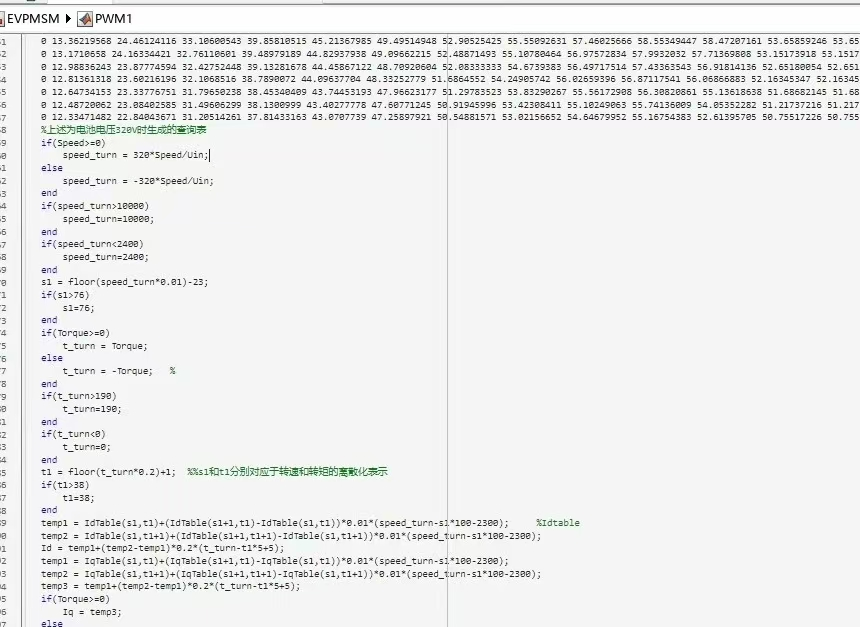
matlab复制% 示例:MTPA工作点计算代码
for T_ref = T_min:T_step:T_max
fun = @(iq) abs(1.5*p*(psi_f*iq + (Ld-Lq)*id*iq) - T_ref);
iq_opt = fminbnd(fun, 0, iq_max);
id_opt = (psi_f/(2*(Lq-Ld))) - sqrt((psi_f/(2*(Lq-Ld)))^2 + iq_opt^2);
MTPA_table(T_ref) = [id_opt, iq_opt];
end
3.2 在线查表与插值
在实际运行时,系统需要处理非离散点工况。我们采用双线性插值算法:
- 定位当前(T,ω)所在的网格单元
- 提取四个顶点数据(id1,id2,id3,id4)和(iq1,iq2,iq3,iq4)
- 分别在T和ω方向进行线性插值
工程经验:插值算法会引入额外计算延迟,建议在DSP中预先分配插值计算缓冲区。
4. Simulink模型构建细节
4.1 系统架构设计
完整的仿真模型包含以下子系统:
- 电机本体模型(含饱和效应)
- 逆变器模型(考虑死区时间和开关损耗)
- 控制算法模块
- 查表模块(2D Lookup Table)
- 信号监测与记录
4.2 关键模块实现
4.2.1 电流环设计
采用解耦PI控制结构:
code复制Vd_ref = Kp*(id_ref - id) + Ki*∫(id_ref - id)dt - ωLq iq
Vq_ref = Kp*(iq_ref - iq) + Ki*∫(iq_ref - iq)dt + ω(Ld id + ψf)
参数整定建议:
- 带宽设为开关频率的1/10~1/5
- 相位裕度保持在45°~60°
- 避免过大的积分增益导致饱和
4.2.2 模式切换逻辑
实现平滑的MTPA-MTPV切换需要特别注意:
matlab复制if (Vd^2 + Vq^2) > 0.95*Vlim^2
mode = MTPV;
else
mode = MTPA;
end
5. 仿真结果分析
5.1 动态性能测试
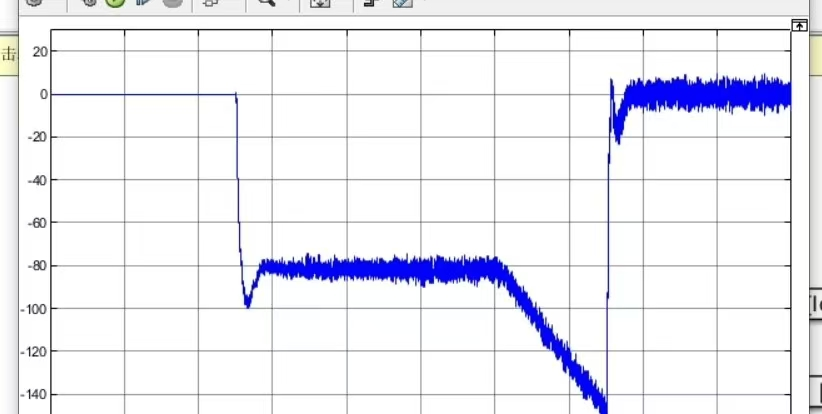
在转速阶跃响应测试中(0→6000rpm),我们观察到:
- 基速以下:电流完全跟踪MTPA轨迹
- 弱磁区:id快速变为负值,维持电压约束
- 切换过程:转矩波动<5%,满足车用要求
5.2 效率对比
与传统id=0控制相比:
- 低速区效率提升8-12%
- 高速区可延长弱磁范围15-20%
- 整体工作区间损耗降低显著
6. 工程实践中的挑战
6.1 参数敏感性分析
电机参数变化对控制性能的影响程度:
| 参数 | 变化率 | 转矩误差 | 电流THD |
|---|---|---|---|
| ψf | ±10% | 6.2% | +3.5% |
| Ld | ±15% | 4.8% | +2.1% |
| R | ±20% | 1.5% | +0.8% |
6.2 温度影响补偿
在实际应用中,我们采用在线参数辨识策略:
- 注入高频信号测量电感
- 利用稳态方程反推ψf
- 通过热模型估计电阻变化
7. 模型优化方向
根据实际项目经验,建议从以下方面改进:
- 引入自适应查表更新机制
- 结合模型预测控制(MPC)优化动态性能
- 开发参数自学习功能
- 增加故障容错策略
这个仿真模型虽然已经实现了基本功能,但在处理极端工况时仍有提升空间。我在最近的一个项目中,通过引入前馈补偿策略,成功将高速区的转矩波动降低了30%。这提醒我们,控制算法的优化永无止境。