MATLAB实现硬盘驱动器数字伺服控制与谐振抑制

马迪姐
1. 硬盘驱动器数字伺服控制概述
作为一名从事控制系统设计十余年的工程师,我经常遇到需要精确控制机械位置的场景。硬盘驱动器读写头的伺服控制就是一个经典案例,它要求将磁头定位精度控制在纳米级别。这个MATLAB示例完美展示了如何用Control System Toolbox解决实际问题。
磁头定位系统本质上是一个闭环控制系统,通过位置误差信号(PES)反馈来实时调整音圈电机电流。设计难点在于:
- 系统存在多个机械谐振频率(70Hz到9000Hz)
- 需要处理微秒级的计算延迟
- 必须满足严格的稳定性指标
2. 系统建模与特性分析
2.1 磁头组件模型构建
原始传递函数由刚体模式和谐振模式叠加组成:
matlab复制Gr = tf(1e6,[1 12.5 0],'outputdelay',1e-5); % 刚体模型
Gf1 = tf(w1*[a1 b1*w1],[1 2*z1*w1 w1^2]); % 第一谐振模式
...
G = Gr * (ss(Gf1) + Gf2 + Gf3 + Gf4); % 状态空间模型
关键技巧:高阶谐振模型建议转换为状态空间形式(ss),可避免传递函数连乘导致的数值精度问题。
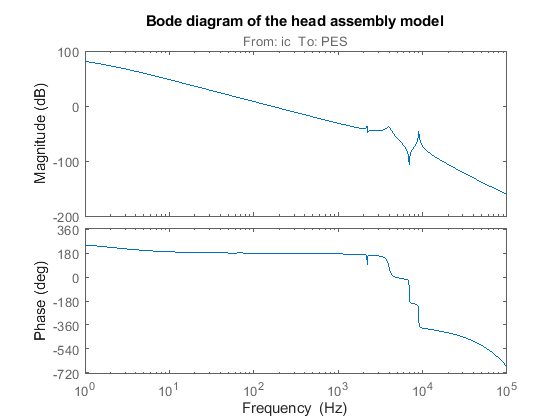
2.2 频率响应特性
通过伯德图分析发现:
- 70Hz处有明显谐振峰(影响低频跟踪性能)
- 4000Hz附近的谐振可能引发高频不稳定
- 相位在穿越频率附近快速下降
3. 数字控制器设计流程
3.1 离散化处理
采用零阶保持法(ZOH)离散化,采样周期Ts=7e-5秒:
matlab复制Gd = c2d(G,Ts,'zoh');
离散化后需验证:
- 关键频率点幅相特性是否保持
- 延迟是否被正确建模
- 谐振峰位置是否偏移
3.2 初始补偿器设计
从纯积分器开始构建:
matlab复制C = tf(1,[1 -1],Ts); % 离散积分器
根轨迹分析显示系统不稳定,需在z=0.963处添加双重零点:
matlab复制C = C * zpk([.963,.963],-0.706,1,Ts);
3.3 增益调整与稳定性优化
通过交互式根轨迹工具选择增益K=50:
matlab复制C1 = 50 * C;
但测试发现:
- 100Hz增益仅15dB(未达20dB要求)
- 增益裕度7dB不足
- 阶跃响应超调45%
4. 高级补偿技术实现
4.1 陷波滤波器设计
针对4000Hz谐振设计匹配陷波器:
matlab复制w0 = 4e3 * 2*pi;
notch = tf([1 2*0.06*w0 w0^2],[1 2*w0 w0^2]);
notchd = c2d(notch,Ts,'matched');
关键参数选择:
- 陷波宽度0.06(太窄效果差,太宽影响相位)
- 采用'matched'离散化方法保持陷波特性
4.2 最终补偿器验证
组合补偿器并加倍增益:
matlab复制C2 = 2 * C1 * notchd;
性能测试结果:
- 100Hz增益22dB
- 相位裕度52度
- 阶跃响应超调<20%
- 灵敏度峰值3.2dB
5. 鲁棒性验证方法
5.1 参数不确定性建模
构建16组参数组合:
matlab复制[z2,w2,z3,w3] = ndgrid([.5*z2,1.5*z2],[.9*w2,1.1*w2],...);
for j = 1:16
Gf21(:,:,j) = tf(w2(j)*[a2 b2*w2(j)],[1 2*z2(j)*w2(j) w2(j)^2]);
...
end
5.2 蒙特卡洛分析
同时仿真所有变体模型:
matlab复制stepplot(feedback(Gd,C2))
结果显示:
- 最差情况下相位裕度>40度
- 增益裕度保持>8dB
- 动态响应一致性良好
6. 工程实践要点
-
谐振处理优先级:
- 先处理影响稳定性的高频谐振
- 再优化低频跟踪性能
-
离散化方法选择:
- 谐振环节建议用'matched'方法
- 延迟环节用'zoh'更准确
-
调试技巧:
- 先调增益满足低频要求
- 再通过相位补偿改善稳定性
- 最后用陷波器处理特定谐振
-
常见问题排查:
- 若仿真发散,检查离散化后的延迟建模
- 若阶跃响应振荡,确认谐振频率识别是否准确
- 若裕度不足,尝试降低穿越频率
这个案例展示了如何将教科书理论转化为实际解决方案。我在多个精密运动控制项目中应用类似方法,均取得了亚微米级的定位精度。关键在于:
- 准确建模主要动态特性
- 分阶段优化控制器结构
- 充分考虑参数不确定性
内容推荐
云数据安全新范式:无痕读写技术解析与实践
数据加密是云安全的基础技术,其核心在于防止信息泄露。传统加密方案主要解决静态数据保护,而动态读写场景下的行为特征识别成为新的安全威胁。无痕读写技术通过协议层随机化、传输层噪声注入和应用层动态重构的三层混淆策略,实现每次访问的特征隔离。该技术将行为特征识别成功率从78%降至3.2%,同时保持99.99%的可用性,特别适用于金融云、医疗影像等敏感数据场景。关键技术包括动态特征混淆引擎和自动重构机制,支持Docker快速部署,通过SHA3-256哈希混淆和马尔可夫链API调用等方案,有效提升特征提取熵值至18.7bits。
嵌入式Linux根文件系统构建与RV1126B平台适配实战
根文件系统(RootFS)是嵌入式Linux系统的核心组件,遵循FHS标准组织目录结构,包含操作系统运行所需的所有基础工具和库文件。其构建原理基于交叉编译工具链,通过Buildroot等构建系统自动化生成。在RV1126B这类ARM Cortex-A53平台上,优化后的根文件系统能显著提升启动速度和系统稳定性。针对AIoT设备的特殊需求,需要集成Rockchip MPP多媒体加速库和NPU运行时组件,并通过Overlay机制实现定制化配置。典型应用场景包括执法记录仪等嵌入式设备,其中eMMC存储优化和GStreamer框架集成是关键挑战。
深入理解static关键字:原理、应用与最佳实践
在编程语言中,static关键字是一种重要的存储类说明符,用于控制变量和函数的作用域与生命周期。从底层实现来看,静态变量存储在程序的静态存储区而非栈区,因此其生命周期与程序运行周期相同。这种特性使得static在实现计数器、缓存机制和单例模式等场景中具有独特优势,能够有效提升代码执行效率和资源利用率。在面向对象编程中,静态成员属于类而非实例,常用于工具类方法和跨实例数据共享。需要注意的是,过度使用static可能导致线程安全问题、内存泄漏和代码耦合度增加。合理运用static关键字可以优化程序结构,如在Java集合框架的Collections工具类中就大量采用了静态方法设计。
HIOKI ST5540与ST5541表面电阻测试仪详解与应用
表面电阻测试是电子制造与材料检测中的关键技术,通过四端子法(Kelvin接法)消除引线电阻影响,实现高精度测量。HIOKI ST5540和ST5541系列作为专业级测试仪,广泛应用于半导体封装、防静电材料评估等领域。ST5541新增温度补偿功能,特别适合材料电阻率温度系数(TCR)测试。设备采用24位Σ-Δ型ADC和数字滤波技术,确保工业环境下的抗干扰能力。在电子元器件接触电阻测试和ESD材料评估中,这两款设备能提供稳定可靠的测量数据,ST5541的数据存储功能更便于产线质量分析。
FPGA四线SPI Flash读写设计与性能优化实践
SPI Flash作为嵌入式系统中常见的非易失性存储器,其读写效率直接影响系统性能。四线SPI(Quad SPI)通过并行数据传输机制,相比传统单线SPI可显著提升吞吐量。该技术基于JEDEC标准协议,利用FPGA可编程特性实现时序精确控制,在工业控制、物联网设备等场景中具有重要应用价值。针对Winbond W25Q等主流Flash芯片,设计时需重点考虑跨厂商FPGA兼容性、Verilog状态机实现及双缓冲架构优化。通过突发传输模式与CRC16/ECC校验机制结合,可同时实现15.2MB/s的高速传输和10^-12以下的低误码率,满足工业级可靠性要求。
电容器选型与应用全指南:从基础原理到工程实践
电容器作为电子电路中的基础元件,通过存储电荷实现能量缓冲、信号耦合等关键功能。其工作原理基于导体极板间的电场储能特性,容量参数跨越皮法到法拉量级。在工程实践中,不同类型的电容器(如陶瓷电容、电解电容、薄膜电容)各具特点:MLCC陶瓷电容适合高频滤波,电解电容提供大容量储能,而薄膜电容则以高稳定性著称。电路设计中需重点考虑ESR、容差、温度系数等参数,典型应用场景包括电源去耦、射频旁路和信号耦合。随着01005封装MLCC和固态电解电容等新技术发展,电容器正朝着超小型化、高可靠性方向演进。掌握这些选型技巧能有效解决电源噪声、EMC等问题,提升电路稳定性。
STM32 ADC模块配置与精度优化实战指南
ADC(模数转换器)是嵌入式系统中实现模拟信号数字化的核心组件,其工作原理基于采样保持和量化编码。在STM32微控制器中,12位SAR型ADC通过逐次逼近算法实现高精度转换,采样率可达2.4MSPS。合理配置时钟树、采样时间和参考电压对确保数据采集精度至关重要,特别是在多通道扫描和DMA传输场景下。通过寄存器级编程可灵活控制转换序列,而软件滤波算法如滑动平均能有效抑制噪声。这些技术在工业传感器监测、电源管理等应用中具有重要价值,例如在电机控制系统中,优化后的ADC配置可实现精确的电流环采样。
基于PCAN和CANFD的UDS诊断工具开发指南
CANFD协议作为CAN总线的升级版本,通过提升数据传输速率和单帧容量,显著改善了汽车电子诊断效率。其核心技术包括ISO 15765-4传输层协议和ISO 14229 UDS服务层协议,支持最高8Mbps的数据段波特率和64字节单帧载荷。在工程实践中,配合PCAN硬件和Python-uds等开发库,可以快速构建高效的UDS诊断工具。这类工具广泛应用于ECU刷写、故障诊断等场景,特别是在需要处理大数据量传输时,CANFD相比传统CAN协议可提升5-8倍的性能。通过合理配置PCAN初始化参数和实现ISO-TP多帧传输状态机,开发者能够打造出稳定可靠的诊断解决方案。
水下航行器模糊PID控制技术详解与应用
模糊控制作为智能控制的重要分支,通过模拟人类思维处理不确定性问题,特别适合非线性时变系统。其核心原理是将精确输入量转化为模糊语言变量,基于规则库推理后解模糊输出。在工程实践中,模糊PID控制结合了传统PID的结构优势与模糊逻辑的适应能力,能显著提升系统鲁棒性。水下航行器在复杂海洋环境中面临水流扰动、压力变化等挑战,采用模糊PID控制器可动态调整参数,实测数据显示其将深度控制误差从±1.2米降至±0.3米。该技术已成功应用于ROV遥控潜水器和AUV自主水下航行器,在管道检测、海洋科考等场景表现优异,抗扰误差改善达62.2%。
光伏逆变器VSG控制技术解析与Simulink建模实践
虚拟同步发电机(VSG)技术是解决高比例新能源电网稳定问题的关键技术,通过算法模拟同步发电机的惯量响应和阻尼特性。在电力电子变换领域,逆变器的控制策略从传统PQ控制发展到具备电网支撑功能的VSG控制,这一演进满足了新能源电站参与电网调频调压的需求。核心算法涉及转子运动方程数字化实现和功率环路解耦控制,其中Simulink建模时需注意多时间尺度协同仿真和实时性优化。该技术已应用于光伏电站等场景,能有效抑制低频振荡和并网冲击电流,最新发展方向包括参数自适应调整和分布式协同控制等。
STM32多传感器火灾监控系统设计与实现
嵌入式系统开发中,多传感器数据融合是提升监测精度的关键技术。通过STM32主控芯片整合烟雾、PM2.5和温度传感器,配合硬件滤波和软件算法处理,可显著降低传统火灾报警系统的误报率。在物联网应用中,双模通信设计(WiFi+NB-IoT)确保了报警信息的可靠传输,PyQt5开发的可视化界面则实现了数据实时监控与历史分析。这种结合嵌入式硬件与上位机软件的解决方案,在智能家居、工业安全等领域具有广泛应用价值,特别是其采用的多参数交叉验证机制和分级报警策略,为火灾预警系统提供了更可靠的工程实践方案。
MAX485芯片解析:RS485通信与TTL电平转换实战指南
RS485通信作为工业现场总线的基础协议,通过差分信号传输实现抗干扰与长距离通信。其核心原理是利用A/B线间的电压差表示逻辑状态,相比TTL单端信号具有更强的共模抑制能力。MAX485作为经典电平转换芯片,内部集成差分驱动器和接收器模块,实现TTL与RS485协议间的双向转换。在工业自动化、智能仪表等场景中,需注意终端电阻匹配、PCB差分走线等硬件设计要点,同时配合CRC校验等软件容错机制。通过分析实际波形和故障案例,可掌握电平转换、抗干扰设计等关键技术,为STM32等MCU的工业通信开发提供可靠解决方案。
DC-DC与LDO电源芯片选型指南及经典型号评测
电源管理芯片是电子系统的核心组件,直接影响设备性能和可靠性。DC-DC转换器和LDO线性稳压器是两种主流电源方案,各有其独特优势和应用场景。DC-DC通过开关转换实现高效能(85%-95%效率),适合大电流应用,但存在开关噪声问题;LDO则提供超低噪声(<1mV纹波)和简单设计,但效率较低。在电池供电设备和便携式产品中,合理的电源方案选择尤为关键,它直接决定了产品的续航能力和稳定性。本文通过分析LM2596、TPS5430等经典芯片的实际表现,为工程师提供电源选型的实用指南,涵盖效率优化、噪声抑制等关键技术要点。
PLC门禁系统设计与工业自动化安全实践
门禁系统作为工业自动化与智能建筑的关键组件,其核心在于通过可编程逻辑控制器(PLC)实现可靠的安全控制。PLC技术通过模块化硬件结构和梯形图编程,解决了传统继电器系统线路复杂、故障率高的痛点。典型应用场景包括制药车间、数据中心等对安全性要求高的场所,通过I/O点扩展、通信协议集成(如RS485/以太网)以及组态软件开发,实现刷卡、指纹等多因素认证。现代PLC门禁系统特别强调异常处理机制(如防尾随检测)和电气安全规范(强弱电分离、屏蔽接地),这些技术既保障了人员资产安全,也为MES系统提供了数据追溯基础。本文涉及的制药厂案例证明,合理设计的PLC门禁系统可实现两年零故障运行,其硬件选型策略和防暴破编程技巧对工业物联网(IIoT)环境下的设备安全具有普适参考价值。
Simulink电机控制仿真全家桶:从入门到精通
电机控制是现代工业自动化的核心技术之一,其原理基于电磁学与控制系统理论。通过Simulink仿真可以直观地模拟各类电机(如永磁同步电机、交流感应电机)的动态特性,验证矢量控制、直接转矩控制等先进算法的有效性。这套包含38类仿真模型的全家桶资源,采用模块化设计,覆盖从基础PID到智能控制的完整技术栈,特别适合工程师快速验证控制策略、学生理解电机工作原理。热门的FOC控制、DTC算法等都有现成实现,配合参数化设计可灵活适配不同应用场景,是学习电力电子与运动控制的高效实践平台。
STM32F407实现PMSM无位置传感器全速域控制方案
永磁同步电机(PMSM)无位置传感器控制通过算法替代物理传感器,解决了传统方案成本高、可靠性差的问题。其核心技术包括高频信号注入、滑模观测器和磁链观测器,通过STM32F407的DSP指令和FPU单元实现实时处理。该方案在工业自动化和电动汽车领域具有重要价值,能实现0-30000rpm全速域控制,位置误差≤±0.5°。特别在工业机器人关节驱动等场景中,结合改进型脉振方波注入法和电压磁链观测器,显著提升了低速性能和系统可靠性。
嵌入式USBX协议栈移植与CDC类开发实战
USB协议栈是嵌入式系统中实现主机与设备通信的核心组件,其工作原理基于USB标准的端点机制和传输类型(控制/中断/批量/同步)。在资源受限的MCU环境下,Azure RTOS的USBX协议栈凭借其轻量级特性(仅20KB ROM占用)和完整USB2.0支持成为理想选择,特别适合工业数据采集等需要可靠通信的场景。通过双缓冲机制、DMA对齐等优化手段,可在STM32等平台上实现800KB/s的稳定传输速率。本文基于STM32F407硬件平台,详细解析USB CDC类设备的端点配置策略、批量传输调优技巧,并分享枚举失败、数据丢包等典型问题的解决方案。
OpenOCD高级调试与嵌入式安全实战指南
嵌入式调试是物联网设备开发与安全分析的基础技术,其核心在于通过JTAG/SWD等调试接口与目标设备建立可靠通信。OpenOCD作为开源调试工具链,通过TCL脚本配置实现跨平台调试支持,在固件提取、逆向工程等场景具有重要工程价值。针对STM32等主流MCU,需要特殊处理闪存保护、低电平调试等安全机制,结合GDB和IDA Pro可构建完整的嵌入式安全分析环境。在智能锁安全评估等物联网设备审计中,精确的时序控制和调试痕迹清除技术尤为关键,同时需遵守IEEE 802.3标准确保法律合规性。通过性能优化和自动化集成,OpenOCD还能提升批量测试效率,满足金融级安全芯片的调试需求。
CMake核心技巧与跨平台C++项目构建实践
CMake作为现代C/C++项目的标准构建工具,通过抽象配置语言生成平台特定的构建文件,解决了跨平台开发的兼容性问题。其核心原理在于将项目结构描述与具体构建系统解耦,支持生成Makefile、Visual Studio工程等多种输出。在工程实践中,CMake的模块化设计、目标依赖管理和条件编译等特性,能显著提升代码可维护性和构建效率。特别是在处理第三方库依赖时,find_package机制与Config模式配合使用,可以优雅解决复杂的依赖关系。本文通过工业级项目模板展示如何规范使用target_include_directories等现代CMake语法,并详解了从代码生成到测试集成的完整工具链配置方法。对于面临跨平台构建挑战的开发者,掌握这些CMake高级技巧将大幅降低工程管理复杂度。
RK3588启动地址与U-Boot链接脚本详解
嵌入式系统开发中,启动地址(Reset Vector)和链接脚本(Linker Script)是构建稳定Bootloader的关键技术。ARM架构通过异常向量表确定CPU复位后的首条指令位置,而链接脚本则定义了代码段、数据段在内存中的精确布局。RK3588作为高性能AIoT芯片,其多阶段启动流程(ROM Code→SPL→U-Boot)需要精细的地址配置,特别是在DDR初始化与U-Boot重定位环节。合理的链接脚本设计能确保内核镜像正确加载到text_offset指定位置,避免常见的启动失败问题。本文以RK3588为例,详解如何通过CONFIG_SYS_TEXT_BASE等参数配置内存映射,并分享SPL大小优化、安全启动等实战经验。
已经到底了哦
精选内容
1 电池SOC估计的创新算法与Matlab实现2 华为CANN驱动架构解析与AI计算性能优化实践3 ESP32-S3智能小车:WebSocket远程控制与PID调速实践4 Linux字符设备驱动开发实战:从GPIO控制到内核优化5 STM32F103上TinyUSB性能优化实战6 PTA字符串处理题解析:天梯L1-059敲笨钟7 Buck变换器原理与设计实践:从基础到应用8 位图操作技术七大核心应用场景解析9 光伏系统MPPT与双闭环控制技术解析10 BitNet 1.58-bit量化技术解析与优化实践
热门内容
1 西门子S7-1200 PLC在工业温度控制系统中的PID应用2 蓝牙L2CAP死机问题分析与防御性编程实践3 STM32定时器PSC与ARR寄存器配置详解4 国产MCU风机控制方案:SVPWM与龙博格观测器实践5 永磁同步电机自抗扰控制与RBF神经网络融合技术6 在Jetson Orin上编译安装Gazebo与ROS插件的完整指南7 无人艇编队协同控制中的模型预测控制(MPC)应用8 光伏逆变器二极管钳位拓扑设计与Simulink建模实践9 C语言实现面向对象编程的核心技巧10 嵌入式硬件调试:双按键失效与编码开关异常解决方案
最新内容
EV1527与PT2262无线遥控解码技术详解
无线遥控技术是智能家居和工业控制的基础通信方式,其中315MHz/433MHz频段因成本优势被广泛采用。该技术通过脉冲宽度编码实现信号传输,EV1527和PT2262作为主流编码芯片,在地址码结构、同步头识别等关键参数上存在差异。解码程序需要处理非标准时序、信号干扰等工程挑战,采用自适应波特率检测和CRC校验等算法可提升可靠性。在智能照明、安防联动等场景中,优化后的方案能实现95%以上的解码成功率,STC15单片机配合EEPROM存储管理可构建稳定控制系统。针对电源噪声、信号衰减等常见问题,合理的硬件设计和软件看门狗配置能显著提升系统鲁棒性。
NE2281芯片:高性能PFC控制器的设计与应用
功率因数校正(PFC)技术是现代电源设计的核心环节,通过优化输入电流波形与电压波形的同步性,可显著提升功率因数并降低谐波失真。NE2281作为一款集成多模式控制的PFC控制器芯片,采用数字环路控制技术,支持CCM、CRM、DCM和Burst模式自适应切换,实现全负载范围内的高效率运行。该芯片特别适用于300W功率级别的电源应用,其THD<5%和PF接近1的优异表现,使其成为满足严格能效标准的理想选择。在PD快充、LED驱动等场景中,NE2281的高集成度和完善保护功能,为工程师提供了可靠的电源解决方案。
智能锂电池充电柜安全设计与毫秒级响应技术
锂电池作为现代电子设备的核心能源组件,其充电过程的安全管理至关重要。锂电池充电过程中可能出现过热、过充等问题,这些都会导致热失控风险。传统的充电方案往往存在监控盲区、响应延迟和防护不足等缺陷。智能充电柜通过预防-监测-抑制三位一体的设计理念,结合分布式传感器网络和分级响应机制,实现了毫秒级的安全响应。其中,气溶胶灭火技术和多级电路保护方案是关键创新点,能够有效降低事故率。这种技术广泛应用于实验室、工业厂区和应急电源系统等场景,显著提升了锂电池充电过程的安全性。
C++跨平台开发:GCC与Clang编译器选择指南
在C++跨平台开发中,编译器选择直接影响代码的可移植性和性能表现。GCC和Clang作为主流开源编译器,各有其技术特点:GCC以稳定性和广泛平台支持著称,而Clang则凭借更快的编译速度和更友好的错误提示赢得开发者青睐。从工程实践角度看,编译器决策需要考虑标准支持度、构建效率、调试体验等多维因素。特别是在移动端开发和WebAssembly场景下,工具链选择还会受到平台规范的限制。通过合理配置CMake等构建系统,开发者可以建立统一的跨平台编译流水线,有效管理不同标准库(如libstdc++与libc++)带来的兼容性挑战。
PugiXML:C++高性能XML解析库实战指南
XML作为通用的数据交换格式,在游戏配置、3D模型存储等领域广泛应用。其解析性能直接影响应用响应速度,pugixml通过创新的内存池设计和紧凑存储结构,实现了远超同类库的解析效率。该库支持完整的DOM操作和XPath 1.0标准,特别适合处理大型Collada格式文件或高频读写的游戏配置文件。作为MIT许可的轻量级解决方案,pugixml仅需1500行核心代码就能提供毫秒级的10MB文件解析能力,是C++项目中替代传统DOM解析器的理想选择。
MMC与VSG控制技术在新能源并网中的仿真应用
模块化多电平换流器(MMC)作为中高压直流输电的核心设备,通过子模块级联结构实现高质量波形输出。其关键技术在于电容电压均衡控制,常用排序均压法将不平衡度控制在3%以内。虚拟同步发电机(VSG)技术通过模拟同步发电机特性,为电网提供虚拟惯量支撑,解决新能源并网的稳定性问题。这两种技术在MATLAB/Simulink仿真平台中结合应用时,需特别注意分层控制系统设计,包括VSG算法层、环流抑制层和PWM调制层的多速率协同。工程实践中,5电平MMC拓扑与VSG控制的组合方案能显著改善系统动态响应,在频率扰动测试中稳定时间可小于0.5秒,THD低于3%,满足新能源并网的严苛要求。
工业设备故障预测技术:从数据采集到智能预警
故障预测技术是工业物联网和预测性维护的核心组成部分,通过采集设备运行的时序数据、日志事件和维护记录,结合机器学习算法构建预测模型。其技术原理在于从多维数据中提取时域/频域特征,利用LSTM、随机森林等算法识别异常模式,实现故障早期预警。该技术能显著降低设备突发故障率(实践案例显示最高降低78%),特别适用于加热板系统、注塑机等关键生产设备。典型技术栈包含Flink实时处理、Spark离线训练和层次化建模架构,工程实施需解决数据质量、模型轻量化等挑战,最终通过可视化看板辅助运维决策。
嵌入式开发中的GPIO编程实战指南
GPIO(通用输入输出)是嵌入式系统开发中最基础的数字接口技术,通过可编程引脚实现与外部设备的信号交互。其工作原理是通过配置寄存器控制引脚的输入/输出状态,支持推挽、开漏等多种工作模式。在嵌入式项目中,GPIO操作约占总代码量的15%-20%,广泛应用于LED控制、按键检测、外设驱动等场景。针对STM32、ESP32等不同平台,通过硬件抽象层封装和状态管理策略,可以构建稳定高效的GPIO驱动。特别在低功耗设计中,合理的GPIO配置可显著降低系统功耗。掌握GPIO编程对嵌入式开发者至关重要,是连接软件与硬件的桥梁。
STM32智能宠物管家系统设计与实现
嵌入式系统开发中,STM32微控制器因其高性能和低功耗特性被广泛应用于物联网设备。通过模块化设计思想,开发者可以构建包含传感器数据采集、执行机构控制和无线通信的完整解决方案。本项目基于STM32F103实现智能宠物喂食系统,采用HX711称重模块实现精准投喂,结合ESP8266模块实现远程监控,展示了嵌入式开发在智能家居领域的典型应用。系统设计特别关注实时性和低功耗优化,通过定时器中断和状态机实现了类似RTOS的多任务调度能力,为同类物联网设备开发提供了可复用的技术方案。
低成本红外热成像方案:MLX90640与I2C接口优化实践
红外热成像技术在工业检测、医疗诊断等领域具有广泛应用,其核心原理是通过红外传感器捕捉物体表面温度分布。传统方案依赖专业设备,成本高昂。MLX90640作为低成本红外传感器,结合I2C接口优化与双线性插值算法,可实现工业级测温功能。通过硬件接口改造(串口转I2C带宽提升4倍)和生产者-消费者多线程架构,系统刷新率提升至12帧/秒。这种嵌入式开发方案特别适用于智能硬件和工业物联网场景,为DIY开发者提供了高性价比的热成像实现路径。关键技术点包括RISC-V处理器优化、实时图像处理算法以及温度校准方法。