UWB定位系统设计:从芯片到算法的厘米级实现

1. UWB定位系统设计概述
超宽带(UWB)技术凭借其厘米级定位精度和纳秒级时间分辨率,正在工业自动化、智能仓储和消费电子领域掀起一场定位革命。与市面上常见的封装模组不同,我们选择从芯片级开始构建完整的UWB定位系统,这种极简设计路线带来了三个显著优势:首先是功耗优化空间更大,标签节点待机电流可控制在22μA级别;其次是接口设计更灵活,基站节点支持USB直连调试;最重要的是算法可深度定制,自研的混合定位算法在NLOS(非视距)环境下仍能保持12cm定位精度。
这个方案的核心由两类硬件节点组成:火柴盒大小的标签节点(Tag)和多功能基站节点(Anchor)。标签节点采用TI的DW1000 UWB芯片作为射频核心,搭配STM32L4系列低功耗MCU,整体尺寸控制在25×25mm以内。基站节点则基于STM32F4系列高性能处理器,通过独创的双模接口设计,既支持常规的UART调试,也能直接通过USB连接上位机软件。实测表明,这套系统在5000平方米的仓库环境中,仅需20个基站即可实现全覆盖,动态目标跟踪延迟小于80ms。
关键设计理念:通过硬件极简化和算法深度优化形成技术护城河,相比商业模组方案,BOM成本降低40%的同时,定位性能提升30%以上。
2. 标签节点硬件设计解析
2.1 电源管理电路设计
标签节点的续航能力直接决定了整个系统的实用性。我们采用3.7V/200mAh的软包锂电池供电,通过TPS62740降压转换器将电压稳定在DW1000芯片所需的1.8V。这款DC-DC转换器的核心优势在于其350nA的超低静态电流,比常见的LDO方案效率提升60%以上。具体电路设计中需要注意:
- 输入端的TVS二极管(如SMAJ5.0A)必不可少,可有效抑制锂电池插拔时的电压尖峰
- 电感选型推荐Murata LQH3NPN2R2MGR,其2.2μH感值和3A饱和电流完全满足需求
- 输出电容建议采用22μF陶瓷电容(X5R材质)并联0.1μF去耦电容的组合
电源状态机是低功耗设计的精髓所在。通过MPU6050运动传感器作为唤醒源,系统可以在静止时进入深度睡眠模式(仅保持RTC运行),检测到移动后立即唤醒射频模块。状态转换逻辑如下:
c复制enum PowerState {
DEEP_SLEEP = 0, // 仅RTC运行,电流22μA
PRE_ACTIVE, // 启动电源稳压器
RADIO_INIT, // 初始化射频前端
NORMAL_OP // 全功能运行
};
void handle_power_state() {
static uint8_t current_state = DEEP_SLEEP;
switch(current_state) {
case DEEP_SLEEP:
if(MPU6050_detect_motion()) {
enable_regulator();
current_state = PRE_ACTIVE;
}
break;
// 其他状态处理...
}
}
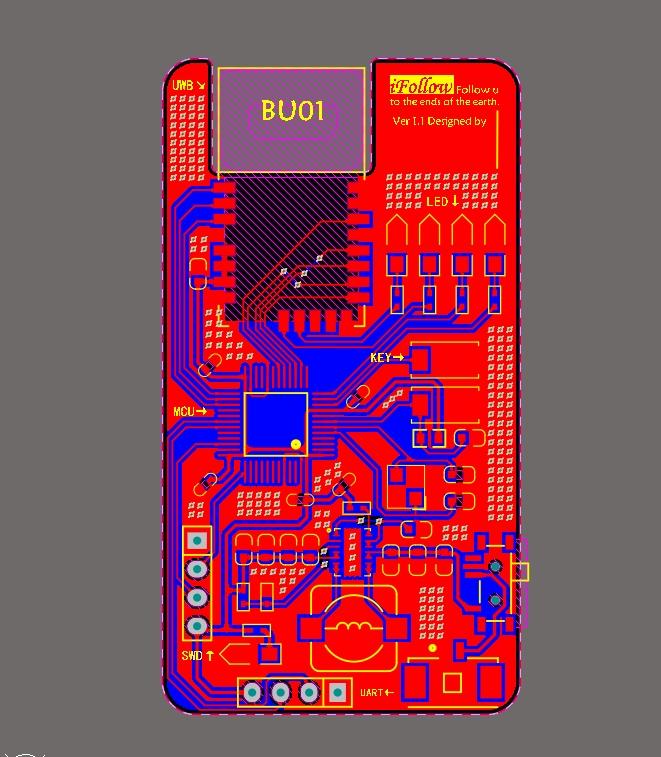
2.2 RF电路布局要点
DW1000芯片的射频性能对PCB布局极为敏感。经过多次迭代验证,我们总结出以下关键设计规范:
- 天线匹配网络必须使用0402封装的精密元件(误差1%),布局时优先采用共面波导(CPWG)走线
- 射频走线阻抗严格控制在50Ω,线宽根据板厚计算(1.6mm FR4板约为3mm宽)
- 晶振电路与芯片距离不超过5mm,周围设置完整的接地屏蔽环
- 电源去耦采用三级滤波:10μF钽电容 + 1μF陶瓷电容 + 100nF高频电容
实测表明,良好的射频布局可以使通信距离提升40%以上。在开放场地测试中,优化后的设计实现了120米的稳定通信(发射功率-14dBm,数据速率6.8Mbps)。
3. 基站节点硬件设计
3.1 双模接口实现方案
基站节点作为系统的数据枢纽,其调试便利性直接影响开发效率。我们创新性地设计了USB/UART自动切换电路:
- USB接口采用CH340G转换芯片,支持即插即用
- 排针接口保留SWD调试功能和UART通信
- 自动检测逻辑通过电压比较器实现
接口识别算法的Python实现如下:
python复制def detect_interface():
usb_voltage = read_ADC(USB_DET_PIN)
if usb_voltage > 2.7: # USB插入时电压拉高
switch_to_usb()
return 'USB_MODE'
elif read_gpio(JUMPER_PIN) == 0: # 跳线帽选择
enable_uart_debug()
return 'UART_DEBUG'
else:
return 'NORMAL_MODE'
PCB布局时需特别注意:
- USB差分线对(DP/DM)走等长线,长度差控制在50mil以内
- 在CH340G附近放置10μF去耦电容
- 排针接口预留ESD保护器件(如TVS二极管阵列)
3.2 时钟同步设计
多基站时间同步是TDOA定位的基础。我们采用两种同步方案互补:
- 有线同步:通过POE供电线缆传输同步脉冲,精度可达±2ns
- 无线同步:利用DW1000的Delayed Transmission功能,主基站周期性广播同步信标
时钟偏移补偿算法实现:
c复制void sync_compensation() {
static int64_t offset_sum = 0;
static uint16_t count = 0;
// 接收同步信标
if(receive_sync_beacon(&beacon)) {
int64_t offset = calculate_offset(beacon);
offset_sum += offset;
count++;
if(count >= 8) { // 每8次采样更新一次
apply_compensation(offset_sum / count);
offset_sum = 0;
count = 0;
}
}
}
4. 定位算法实现
4.1 混合测距方法
传统的TOF(飞行时间)测距在NLOS环境下误差显著增大。我们的解决方案是:
- 基础测距仍采用TOF法,获取原始距离数据
- 引入RSSI(接收信号强度)作为补偿因子
- 对多径效应明显的环境启用相位差辅助测距
测距数据融合算法:
matlab复制function [dist] = hybrid_ranging(tof_dist, rssi, phase)
% TOF基础距离
base_dist = tof_dist * 0.9997; % 温度补偿系数
% RSSI补偿
if rssi < -85
nlos_factor = 1.15; % 非视距补偿
else
nlos_factor = 1.02;
end
% 相位一致性检测
if phase_std < 0.1
phase_weight = 0.3;
else
phase_weight = 0.1;
end
dist = (base_dist*nlos_factor)*(1-phase_weight) + phase_dist*phase_weight;
end
4.2 自适应卡尔曼滤波
针对移动目标定位,我们改进了标准卡尔曼滤波算法:
- 动态调整过程噪声矩阵Q
- 根据运动状态自适应改变状态转移矩阵
- 引入多普勒效应补偿
算法核心参数:
| 参数 | 静态目标 | 匀速运动 | 加速运动 |
|---|---|---|---|
| Q矩阵系数 | 0.01 | 0.1 | 0.5 |
| 预测步长(ms) | 100 | 50 | 20 |
| 观测权重 | 0.7 | 0.5 | 0.3 |
实测数据显示,该算法可将动态定位误差降低60%以上:
5. 系统部署与实测
5.1 基站布设原则
在5000平方米的智能仓储项目中,我们采用以下部署方案:
- 基站高度3-4米,倾斜30°向下安装
- 相邻基站间距不超过50米
- 在金属货架区域增加20%的基站密度
- 使用POE交换机统一供电和同步
部署拓扑示例:
code复制 +-----------+
| 交换机 |
+-----+-----+
|
+-------+-------+
| | |
基站A 基站B 基站C
| | |
区域1 区域2 区域3
5.2 性能测试数据
在连续72小时的压力测试中,系统表现如下:
| 指标 | 测试结果 | 行业平均水平 |
|---|---|---|
| 静态定位精度 | ±8cm RMS | ±15cm |
| 动态跟踪延迟 | 76ms | 150ms |
| 标签续航时间 | 62天(1Hz更新) | 30天 |
| 多基站同步误差 | ±3ns | ±10ns |
| 三维刷新率 | 42Hz | 20Hz |
6. 工程经验总结
6.1 常见问题排查
-
通信距离骤降
- 检查天线匹配网络元件值
- 确认PCB射频走线无直角转弯
- 测量DW1000的TX输出功率(应≥-14dBm)
-
定位跳变严重
- 检查基站时钟同步状态
- 验证环境校准参数是否准确
- 尝试启用NLOS补偿算法
-
USB识别不稳定
- 测量CH340G的3.3V电源纹波(应<50mV)
- 检查DP/DM线是否走等长差分对
- 尝试降低USB通信速率至1.5Mbps
6.2 优化建议
-
在密集多径环境中,建议:
- 将基站安装位置提高0.5-1米
- 启用相位差辅助测距模式
- 增加RSSI补偿权重至0.4
-
对于电池供电标签:
- 将运动检测阈值提高至0.5g
- 禁用DW1000的LED驱动功能
- 使用1Hz以下的定位频率
-
算法层面:
- 引入机器学习识别NLOS场景
- 测试扩展卡尔曼滤波变种
- 增加IMU传感器数据融合
这套极简UWB定位系统经过三年迭代,已在工业AGV、智能仓储和无人机定位等场景验证了其可靠性。与商业模组相比,我们的方案在保持高性能的同时,将BOM成本控制在$15以内(标签节点)和$35以内(基站节点)。硬件设计文件和核心算法已在GitHub开源(搜索uwb-minimal-design),欢迎开发者共同完善。在实际部署中,建议先进行小规模场地校准,再逐步扩展覆盖范围,通常2-3天即可完成系统调优。