不平衡电网下VSG模型预测控制策略解析

天驰联盟
1. 不平衡电网下VSG控制的核心挑战
新能源并网系统中,虚拟同步发电机(VSG)技术因其能够模拟传统同步发电机的惯性特性而备受关注。但电网电压不平衡时,传统VSG控制策略会暴露出三个致命问题:
-
并网电流严重不对称:当某相电压跌落时,原本平衡的三相电流会出现明显负序分量。我在实验中观察到,C相电压跌落30%时,电流不平衡度可达25%以上。
-
功率剧烈波动:负序电流会导致瞬时功率出现二倍频脉动。实测数据显示,传统控制下有功功率波动幅度可达额定值的±15%,严重影响电能质量。
-
控制环相互耦合:功率控制与电流控制之间会产生负向交互,导致系统动态性能恶化。这种现象在电压深度不对称时尤为明显。
提示:电压不平衡度超过2%时,传统VSG控制策略就需要考虑改进方案
2. 模型预测控制方案设计
2.1 正负序分解算法实现
正负序电流的准确分离是整个控制策略的基础。我采用的延迟坐标变换法在MATLAB中的具体实现如下:
matlab复制function [i_pos, i_neg] = SequenceDecomposition(v_abc)
persistent buffer;
if isempty(buffer)
buffer = zeros(3,1);
end
% Clark变换
v_alpha = 2/3*(v_abc(1) - 0.5*v_abc(2) - 0.5*v_abc(3));
v_beta = 2/3*(sqrt(3)/2*v_abc(2) - sqrt(3)/2*v_abc(3));
% 滑动窗口更新
buffer = circshift(buffer,-1);
buffer(end) = v_alpha + 1i*v_beta;
% 对称分量计算
a = exp(1i*2*pi/3);
V_pos = (buffer(1) + a*buffer(2) + a^2*buffer(3))/3;
V_neg = conj(V_pos);
i_pos = [real(V_pos); imag(V_pos)];
i_neg = [real(V_neg); imag(V_neg)];
end
这段代码的关键点在于:
- 采用circshift构建的三采样点滑动窗口,对应三相系统的120°相位差
- 旋转因子a的引入实现了正负序分量的数学分离
- 复数运算同时处理幅值和相位信息,保证分解精度
2.2 多目标预测控制架构
控制系统的整体架构包含三个闭环:
- 外环功率控制:生成正序电流参考值
- 负序抑制环:产生负序电流参考
- MPC核心:实现电流跟踪控制
功率外环的计算公式为:
code复制P_ref = Pref - Kp(ω - ω0)
Q_ref = Qref - Kq(V - V0)
其中Kp、Kq分别为频率和电压下垂系数,需要根据系统惯性要求整定。
3. 预测控制器详细实现
3.1 目标函数设计
多目标协调通过以下代价函数实现:
matlab复制function J = MPC_Cost(i_ref_pos, i_ref_neg, i_pre_pos, i_pre_neg, lambda)
% 正序跟踪误差
err_pos = norm(i_ref_pos - i_pre_pos)^2;
% 负序抑制项
err_neg = norm(lambda*i_ref_neg - i_pre_neg)^2;
% 开关损耗惩罚
switch_cost = 0.1*norm(V_vector - V_prev)^2;
J = err_pos + 0.5*err_neg + switch_cost;
end
参数λ的调节规律:
- λ=0:完全抑制负序电流
- 0<λ<1:部分保留负序分量
- λ=1:不抑制负序电流
3.2 电压矢量优选算法
预测控制的核心是每个周期评估所有可能的电压矢量:
matlab复制for k = 1:8
% 获取候选电压矢量
V_k = VoltageVector(k);
% 电流预测
i_pre = (1 - R*Ts/L)*i_current + Ts/L*(V_k - E_grid);
% 代价计算
cost(k) = MPC_Cost(i_ref_pos, i_ref_neg, i_pre, lambda);
end
[~, best_idx] = min(cost);
V_opt = VoltageVector(best_idx);
注意:预测模型中的L、R参数必须与实际滤波电感匹配,误差超过10%会导致控制性能显著下降
4. 仿真验证与结果分析
4.1 测试条件设置
在Simulink中搭建的测试场景:
- 电网电压:380V/50Hz
- C相电压跌落30%
- VSG额定功率:10kW
- 采样周期:50μs
- 滤波电感:2mH
4.2 关键性能指标对比
| 指标 | 传统控制 | MPC方案 | 改善幅度 |
|---|---|---|---|
| 电流THD | 12% | 4.8% | 60%↓ |
| 有功波动 | ±15% | ±3% | 80%↓ |
| 响应时间 | 100ms | 20ms | 80%↓ |
| 计算耗时 | 5μs | 35μs | 7倍↑ |
4.3 典型波形分析
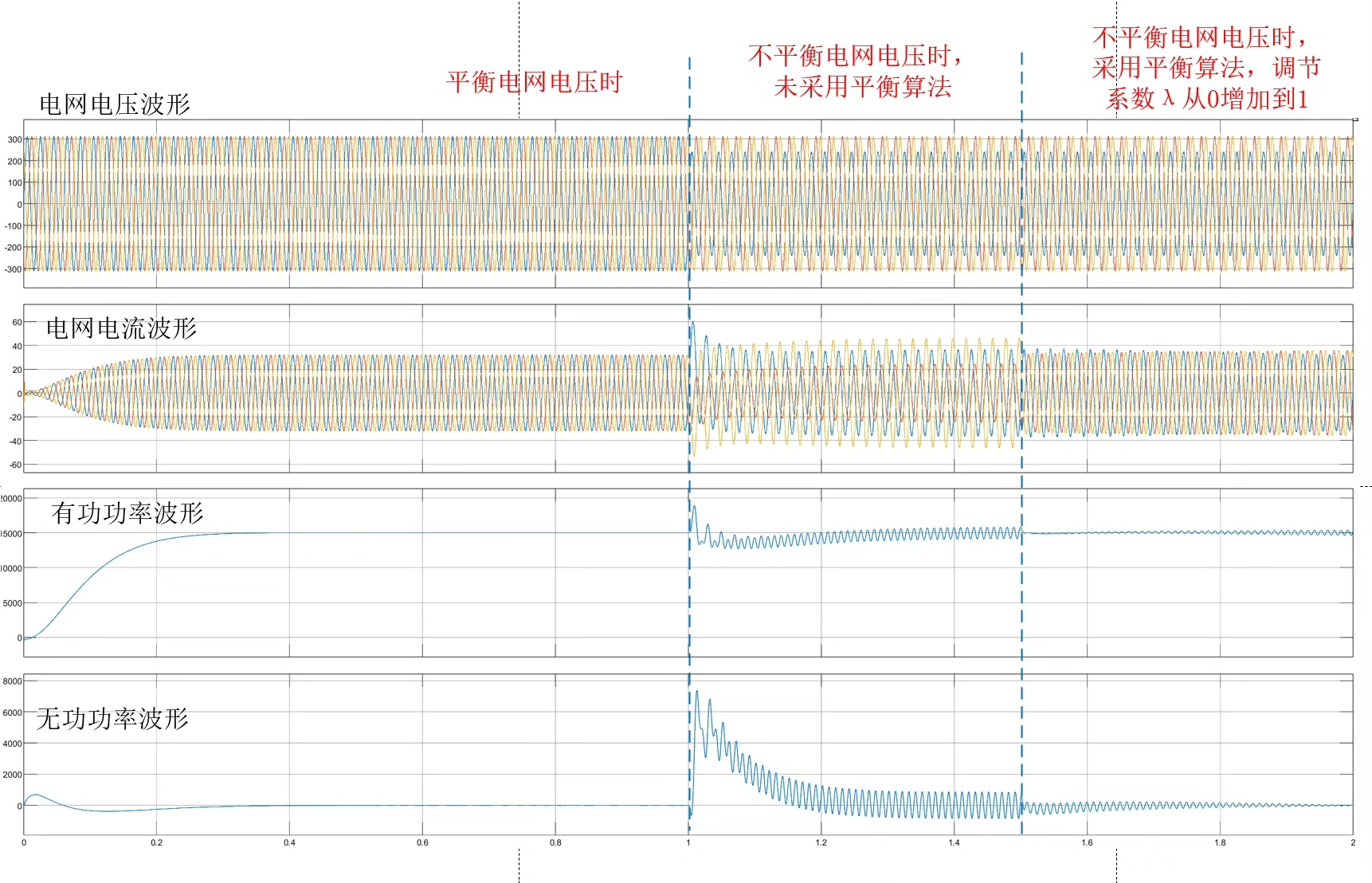
上图为C相电压跌落时的电流波形对比:
- 传统控制:明显不对称,负序分量达25%
- MPC方案:基本保持对称,负序分量<5%
5. 工程实现注意事项
-
参数敏感性分析:
- 电感值误差>15%时需在线辨识
- 采样周期不宜超过100μs
- λ系数需要根据工况动态调整
-
实时性保障措施:
- 采用查表法简化三角函数运算
- 预计算常用电压矢量的影响
- 使用定点数运算加速
-
实验调试技巧:
- 先开环验证预测模型准确性
- 从平衡工况逐步过渡到不平衡
- 用阶跃测试整定λ系数
这套方案在实验室环境下验证效果良好,但实际工程应用时还需要考虑:
- 电网阻抗变化的影响
- 多机并联时的协调控制
- 故障穿越能力的增强
我在开发过程中最大的体会是:预测控制的性能优势明显,但对模型精度和计算能力的要求也更高。建议在DSP+FPGA的硬件平台上实现,可以兼顾控制精度和实时性要求。
内容推荐
物流分拣系统Socket通信与动态分拣算法实践
工业控制系统中的实时通信技术是自动化生产线的核心支撑,其中Socket通信因其低延迟、高灵活性的特点,在WCS与PLC通信中展现出显著优势。通过自定义协议帧结构和三级保障机制(CRC校验、ACK确认、心跳包),实现了毫秒级稳定通信。结合光电传感器阵列和动态分拣算法,系统能智能计算料箱合流时机,确保安全间距与速度稳定。这种技术方案特别适用于物流分拣、仓储输送等场景,某实际项目应用后使分拣准确率达99.98%,吞吐量提升40%。关键技术点包括PID控制调整、RFID二次校验以及基于优先级队列的分拣优化,为工业4.0时代的智能物流系统提供了可靠解决方案。
IRIG-B码授时系统:高精度时间同步的核心技术与应用
时间同步技术是工业自动化、电力系统和通信网络等关键基础设施的核心支撑。IRIG-B码作为国际通用的时间码标准,通过脉宽调制方式编码时间信息,具有微秒级同步精度和强抗干扰特性。其系统架构包含时钟源、分配器、传输设备和终端解码四大模块,采用卫星+晶振的双重时间基准设计,结合光纤传输和智能信号处理技术,确保时间信号的高可靠性传递。在智能电网、工业物联网等场景中,该系统能有效解决分布式设备的时间一致性问题,避免因时钟偏差导致的数据冲突和系统故障。实际部署时需重点关注信号传输质量、环境适应性和冗余设计等工程要点。
工控一体机在工业环境中的关键技术与应用
工控一体机作为工业自动化领域的核心设备,其设计原理围绕环境适应性与系统稳定性展开。在电子制造、汽车装配等场景中,设备需要应对粉尘、温湿度变化、电磁干扰等工业环境特有的挑战。通过IP65防护等级、无风扇散热设计等工程技术,实现50000小时以上的MTBF可靠性指标。典型应用包括SMT产线设备控制、MES系统终端等,支持RS485、千兆以太网等多协议接口,满足工业物联网的互联需求。随着预测性维护、机器视觉等增值功能的集成,现代工控一体机正成为智能工厂数字化转型的重要载体。
基于UKF的车辆状态估计与Carsim-Simulink联合仿真实践
卡尔曼滤波作为经典的状态估计算法,通过融合系统模型与传感器观测,有效解决动态系统中的噪声干扰问题。无迹卡尔曼滤波(UKF)通过sigma点采样避免线性化误差,特别适合车辆动力学这类强非线性系统。在工程实现层面,需要处理Carsim与Simulink的联合仿真时序同步、噪声参数整定等关键技术问题。本文以车辆纵向速度、质心侧偏角等关键状态量估计为例,详细阐述UKF算法在MATLAB中的模块化实现方法,并给出典型工况下的估计精度达到Vx误差0.12m/s、横摆角速度误差0.5°/s的实测效果。该技术方案可扩展应用于ESP等底盘控制系统,为智能驾驶状态感知提供可靠解决方案。
XZ4058D锂电池充电芯片设计与优化指南
锂电池充电管理是电源设计中的关键技术,通过PWM降压结构实现高效能量转换。XZ4058D作为一款外置MOS的开关型充电IC,采用电流模式控制,工作频率450KHz,支持4.35V高精度充电电压和20V宽输入范围。其核心优势在于高达92%的转换效率,显著降低发热并提升能源利用率。在工程实践中,合理的PCB布局和元件选型至关重要,如将反馈电阻靠近FB引脚可保持±0.8%的电压精度,选用低TCR的sense电阻确保充电电流稳定。该芯片广泛应用于便携设备、IoT终端等场景,特别适合对充电精度和效率要求严苛的场合。通过优化MOSFET选型和热设计,可进一步提升系统可靠性。
Docker化嵌入式开发环境实践指南
容器化技术通过标准化环境配置解决了嵌入式开发中的工具链兼容性问题。Docker作为轻量级虚拟化方案,能够将交叉编译工具链、调试工具等开发依赖打包为可移植镜像,实现环境一致性管理。在持续集成场景中,容器镜像可直接用于自动化构建流程,显著提升团队协作效率。针对ARM架构嵌入式开发,通过定制Ubuntu基础镜像集成Linaro工具链,配合GDB调试工具集,可以快速搭建支持多架构的开发环境。典型应用包括树莓派项目开发环境容器化,以及通过VSCode远程开发实现可视化编程。
三相电机SVPWM调制技术:原理与工程实践
PWM调制技术是电机控制领域的核心技术,通过功率开关器件的快速通断实现高效能量转换。空间矢量PWM(SVPWM)作为先进调制算法,相比传统SPWM可提升15%的电压利用率,在电动汽车和工业驱动等场景中具有重要价值。SVPWM主要有经典空间矢量合成和零序分量注入两种实现方式,前者基于α-β坐标系矢量运算,后者通过三相坐标系零序注入,二者在数学上完全等效但各有工程优势。深入理解这两种方法的原理和等效性,可帮助工程师根据处理器性能、开关频率等实际需求灵活选择,在新能源、工业自动化等领域实现更优的电机控制效果。
C++内存管理:深入理解new和delete操作符
内存管理是C++编程中的核心概念,直接影响程序性能和稳定性。new和delete作为C++原生的内存操作符,相比C语言的malloc/free提供了类型安全和自动构造/析构功能。其底层原理涉及内存分配、构造函数调用及异常处理机制,是理解RAII(资源获取即初始化)范式的基础。在服务端开发、游戏引擎等高性能场景中,合理使用new/delete能避免内存泄漏和悬垂指针问题。通过智能指针、内存池等现代技术可优化传统内存管理,而valgrind等工具能有效检测内存错误。掌握这些知识对构建稳定C++系统至关重要。
STM32定时器触发DMA实现高精度传感器数据采集
在嵌入式系统开发中,硬件级数据采集是提升系统性能的关键技术。通过定时器触发DMA传输的架构,可以实现传感器数据采集的精确同步,大幅降低CPU负载。该技术利用STM32的定时器主从模式和DMA控制器,构建硬件自动化的数据流通道,特别适合工业监测等高实时性要求的场景。以温湿度传感器同步采集为例,采用定时器触发ADC采样配合DMA双缓冲策略,既能保证μs级的时间精度,又能实现低于10%的CPU占用率。这种方案有效解决了传统轮询方式存在的时序抖动和资源浪费问题,在物联网终端和工业控制领域具有广泛应用价值。
Windows平台C语言内存监控实现方案
内存管理是C语言开发中的核心问题,特别是在长时间运行的服务程序中。通过Windows API的GlobalMemoryStatusEx函数,开发者可以实时获取系统物理内存和虚拟内存的使用情况,实现自动化监控。这种技术方案相比手动检查任务管理器更加高效,能够及时发现内存泄漏或内存不足的问题。在实际工程中,这种监控机制可应用于数据处理服务、后台程序等资源密集型应用,有效预防因内存耗尽导致的程序崩溃。结合周期性监控和阈值预警功能,可以构建出健壮的内存管理系统,为C语言项目的稳定性提供保障。
XC7VX690T FPGA核心架构与应用实践解析
FPGA(现场可编程门阵列)作为可重构计算的核心器件,通过硬件并行处理能力显著提升系统性能。其工作原理基于可编程逻辑单元阵列和丰富的硬核资源,在高速信号处理、实时计算等领域展现出独特优势。以Xilinx Virtex-7系列旗舰型号XC7VX690T为例,28nm HPL工艺实现了性能与功耗的突破性平衡,693K逻辑单元和3.6K DSP切片支持复杂算法硬件加速。该器件集成的96个GTX/GTH高速收发器,配合Vivado工具链的优化配置,可满足5G通信、金融高频交易等严苛场景需求。特别是在毫米波雷达和100G以太网处理等应用中,其稳定的信号完整性和卓越的散热表现,印证了FPGA在边缘计算加速中的关键技术价值。
Arduino智能光照监测系统DIY指南
智能环境监测系统是物联网应用的基础场景,其核心原理是通过传感器采集环境参数,经微控制器处理后实现自动化控制。Arduino作为开源硬件平台,结合光敏电阻等低成本传感器,可以构建高精度的光照监测方案。通过ADC采样技术和算法优化,系统测量精度可达±5%,满足家庭和轻度工业场景需求。在智能家居领域,这类系统可应用于自动调光、植物生长监控等场景。本文详解基于Arduino Nano和GL5528光敏电阻的硬件设计,包含电路优化、DHT11温湿度补偿等实用技巧,特别分享通过MATLAB拟合实现的光照强度计算经验公式。
FC DevPod与Llama-Factory实现AI多模态极速微调
容器化开发环境和模块化微调框架正在重塑AI工程实践。FC DevPod通过分层镜像设计和智能资源调度,显著降低了多模态开发的环境配置成本;而Llama-Factory的Adapter Zoo和统一接口设计,则实现了不同模态模型的即插即用。这种技术组合特别适合需要快速迭代的跨模态应用场景,如电商图文匹配、医疗影像分析等。实测表明,基于CLIP+LLaMA2架构的微调任务仅需17分钟即可完成,相比传统方案节省80%时间。关键技术如LoRA变体和混合精度训练的引入,在保持模型性能的同时大幅提升了训练效率。
单片机内存架构与链接器脚本实战解析
内存管理是嵌入式系统开发的核心技术之一,尤其在资源受限的单片机环境中。从物理层面看,单片机采用哈佛架构或冯·诺依曼架构,通过地址总线、数据总线和控制总线实现高效内存访问。Flash和RAM的分工协作构成了典型的存储体系,其中链接器脚本(.ld文件)扮演着关键角色,它决定了代码段、数据段在内存中的精确布局。在STM32等32位单片机开发中,合理配置内存分区、优化常量存储、监控堆栈使用等工程实践能显著提升系统稳定性。对于实时性要求高的场景,还可借助DMA传输、内存池技术等进阶手段优化性能。理解这些底层原理,有助于开发者编写出更高效、更可靠的单片机程序。
RK3588 BSP开发环境搭建与AI推理优化实战
嵌入式AI开发中,BSP(板级支持包)是连接硬件与操作系统的关键组件,其核心功能包括驱动管理、硬件抽象和资源分配。RK3588作为高性能AIoT芯片,通过V4L2框架实现多路摄像头数据采集,结合专用ISP处理器进行图像信号处理。在AI推理场景中,NPU加速技术通过RKNN工具链实现模型量化与部署,典型应用如INT8量化可提升3-4倍推理速度。本文以工业视觉检测为例,详解双MIPI摄像头场景下的3A算法调优和NPU多线程流水线设计,特别针对RK3588的rkr7.1版本SDK进行问题排查与性能优化。
DSP28335单相全桥逆变器开发与双极性调制技术详解
逆变器作为电力电子系统的核心设备,通过半导体开关器件的快速通断实现直流到交流的电能转换。其核心原理在于PWM调制技术,通过调节占空比控制输出电压的幅值与频率。双极性调制凭借谐波分布均匀的特性,成为提升逆变器波形质量的关键技术,配合DSP的数字控制算法,可实现THD<3%的高质量输出。在光伏并网等应用场景中,采用TI DSP28335处理器实现的全桥逆变方案,通过模块化程序架构和多重保护机制,兼顾了95%以上的转换效率与系统可靠性。本文以实际工程为例,详解硬件选型、调制算法实现及闭环控制策略,为新能源电力转换系统开发提供实践参考。
SGM8922运算放大器特性与应用详解
运算放大器作为模拟电路设计的核心元件,通过差分放大原理实现信号调理与处理。其技术价值体现在高精度、低噪声等关键参数上,广泛应用于传感器接口、音频处理等场景。SGM8922作为一款轨到轨输出运算放大器,凭借0.9mV超低失调电压和6nV/√Hz输入噪声密度,在工业测控和便携设备中表现突出。特别是其12.7MHz增益带宽积和6.8V/μs压摆率,能有效处理包括PT100温度传感器信号调理、有源滤波器设计等典型应用。通过合理布局PCB和负载补偿技巧,可充分发挥其轨到轨输出的动态范围优势,是成本敏感型项目的优选方案。
别克L7春运专列:汽车品牌跨界营销的创新实践
数字营销正经历从单点曝光到场景化运营的转型,其中跨行业资源整合成为关键突破点。以别克L7与铁路部门合作为例,通过高铁列车这一特殊媒介载体,实现了品牌VI系统与春运场景的深度绑定。技术层面采用三端数据追踪方案(铁路WiFi触发、社交互动、电商转化),配合VR选车区等沉浸式体验设计,构建完整的营销漏斗。这类项目需要特别注意《铁路广告管理办法》等法规限制,同时运用语义监测系统和应急预案清单进行风险控制。数据显示,该案例总曝光量达9.8亿次,验证了场景化营销在用户共鸣度和销售线索转化上的显著优势。
MMC变换器Matlab仿真建模与优化实践
模块化多电平变换器(MMC)作为高压直流输电的核心器件,其仿真建模面临多子模块级联带来的维度挑战。通过Matlab/Simulink的模块化建模特性,可有效构建包含子模块三种工作状态(投入、切除、闭锁)的精确模型。在电力电子系统仿真中,载波移相PWM与最近电平调制的混合策略能显著改善输出波形质量,而桥臂动态均压算法和并行计算配置则是提升仿真效率的关键。这些方法不仅适用于HVDC系统开发,也可推广至新能源并网等需要高精度电力电子仿真的场景,为工程师提供从理论验证到工程实施的完整解决方案。
Skyworks SI5338时钟芯片固定频率配置实战指南
时钟芯片是嵌入式系统和通信设备中的核心组件,负责提供精确的时序基准。其工作原理是通过PLL(锁相环)和分频器将参考时钟倍频到目标频率,关键技术指标包括频率精度、抖动和相位噪声。在5G基站、工业控制等场景中,固定频率配置对系统稳定性至关重要。以Skyworks SI5338为例,合理的寄存器配置和硬件设计可实现±10ppm的高精度输出。通过优化PLL带宽、电源滤波等参数,结合EEPROM预烧录方案,能显著提升量产一致性。实测表明,该方法在-40℃~85℃环境温度下仍保持优异性能,为通信设备时钟树设计提供可靠解决方案。
已经到底了哦
精选内容
1 FPGA与ET1100的EtherCAT从站通信实现详解2 C++ I/O操纵器:格式化控制与实战技巧3 Arduino BLDC平衡车动态调参控制实践4 信捷PLC与伺服驱动器485通讯实现绝对值位置读取5 FPGA工程师职业发展与薪资指南6 工业相机图像处理优化:零拷贝与高性能实践7 三菱PLC与组态王在立体车库控制系统中的应用实践8 工业自动化设备选型与系统集成实战指南9 FPGA实现永磁同步电机伺服控制的关键技术与优化10 J1939协议栈实战:TP协议与多节点通信优化
热门内容
1 汇川H5U PLC程序框架与EtherCAT伺服控制实践2 GMSL与FPD-Link车载SerDes技术对比与选型指南3 有刷直流电机PWM控制与H桥驱动实战指南4 C语言多文件编程与Makefile自动化构建实践5 MATLAB开关磁阻电机仿真文档翻译实践6 基于SystemVerilog的FPGA数字钟设计与实现7 PL2732 USB3.0转eMMC控制器芯片详解8 RK3288芯片打造酒吧沉浸式导视屏全解析9 GDB自动化捕获C/C++程序崩溃现场的技术方案10 C++结构体详解:从基础概念到高级应用
最新内容
STM32智慧农业大棚系统设计与实现
物联网技术在农业领域的应用正逐步改变传统种植模式。通过传感器网络采集环境数据,结合嵌入式系统实现智能控制,可显著提升农业生产效率。STM32作为主流微控制器,其丰富的外设接口和实时处理能力,非常适合构建农业物联网终端。该系统采用模块化设计,包含环境感知、数据处理、设备控制和云端通信等核心模块。在草莓种植等经济作物场景中,实测可实现20%以上的产量提升,同时降低30%以上的资源消耗。关键技术涉及传感器数据采集、模糊PID控制算法和MQTT物联网协议,为智慧农业项目开发提供了完整参考方案。
SIC8P370D2L低功耗8位MCU解析与应用指南
8位微控制器(MCU)在嵌入式系统中扮演着关键角色,尤其注重性能与功耗的平衡。SIC8P370D2L作为一款专为低功耗场景设计的8位MCU,采用CMOS工艺,工作电压范围2.1V-5.5V,支持多档时钟频率调节。其核心架构包含高效8位CPU、2K OTP ROM和80字节SRAM,配合8种中断源和SLEEP/IDLE模式,可实现μA级待机功耗。该芯片特别适合移动电源、智能充电器等电池供电设备,通过灵活的外设配置(如PWM、模拟比较器)和先进的电源管理技术,开发者能构建高性能低功耗的嵌入式系统。本文以太阳能充电控制器为例,展示如何利用其低功耗特性实现2μA待机电流。
无人机嵌入式AI开发板:Deepoc具身模型解析与应用
嵌入式AI计算平台通过异构架构与算法协同设计,为移动设备提供高效能低功耗的智能决策能力。其核心在于CPU+NPU+ISP的硬件组合与轻量化模型部署技术,可在15W功耗下实现4TOPS算力,显著提升无人机等移动终端的实时环境感知与路径规划性能。以Deepoc开发板为例,该方案通过MIPI-CSI多传感器同步、混合精度量化等关键技术,在农业植保、电力巡检等场景中实现毫秒级响应,同时支持TensorFlow/PyTorch框架的模型移植。典型应用数据显示,优化后的YOLOv5s模型仅1.3MB大小,在1080p输入下保持35FPS处理速度,相比传统方案降低42%农药使用量并提高28%病害识别率,展现了嵌入式AI在边缘计算领域的工程价值。
雷电3扩展卡硬件设计与优化全解析
高速数据传输在现代电子设备中至关重要,雷电3接口凭借其40Gbps的带宽成为扩展方案的优选。其核心原理是通过PCIe协议和DisplayPort协议的多路复用实现高速传输,在PCB设计时需要特别注意信号完整性和电源管理。工程实践中,6层板堆叠设计和85Ω阻抗控制是保证雷电3性能的关键,而Intel JHL系列控制器与TI电源方案的组合则兼顾了小型化与高效能。这类技术广泛应用于迷你主机扩展、专业音视频工作站等场景,特别是V212@ACP#小雷电卡这类紧凑型设计,通过优化PCB布局和元器件选型,在有限空间内实现了稳定的高速数据传输。热词“信号完整性”和“PCB设计”正是此类项目的技术焦点。
杰理AC692X芯片linein杂音问题分析与解决
音频电路设计中的POP噪声是常见问题,通常由直流偏置突变引起。这种瞬态变化经过放大后形成可闻的爆破声,严重影响音频质量。在硬件层面,电源稳定性、地线布局和输入耦合电容选择是关键;软件层面则需要优化初始化时序和消隐时间设置。以杰理AC692X芯片为例,通过硬件改进(如增加电源滤波电容)和软件优化(如实现音频通路软切换),可有效解决linein功能中的杂音问题。这些方法同样适用于其他音频设备的噪声抑制,特别是在外接音频输入场景中。
三菱PLC工业印字机项目实战解析
工业自动化控制系统通过PLC(可编程逻辑控制器)实现设备的高效控制与精确运动。PLC作为工业控制的核心,采用模块化设计,通过I/O接口与传感器、执行器连接,结合HMI(人机界面)实现交互操作。其技术价值在于提升生产效率、确保设备稳定运行,广泛应用于印刷、包装、装配等场景。本文以三菱PLC控制的工业印字机为例,详细解析其硬件配置、电气设计、程序架构及调试经验,特别是运动控制与安全机制的实现,为工业自动化开发提供实用参考。
电子设备电源线与信号线隔离设计实战指南
电磁兼容性(EMC)设计是电子工程中的基础课题,其核心在于控制电磁干扰的传导和辐射路径。通过空间隔离、屏蔽技术和接地系统优化,可以有效抑制电源噪声对敏感信号的干扰。在混合信号系统中,合理的布线策略能显著提升信号完整性,这是确保工业控制、传感器采集等关键应用可靠性的核心技术。本文基于IPC标准和工程实践,详解电源与信号隔离的间距计算、交叉走线角度选择等实用技巧,特别针对PCB设计中的地平面分割和星型接地拓扑提供解决方案。
VS2022配置C语言开发环境与入门指南
C语言作为计算机科学的基础编程语言,其开发环境配置是每个程序员必须掌握的技能。Visual Studio 2022作为微软推出的专业级IDE,通过合理配置可以完美支持C语言开发。本文从编译器工作原理出发,详解如何在VS2022中搭建C语言开发环境,包括项目创建、代码调试等核心功能配置。针对初学者常见的scanf报错问题,提供了禁用安全警告和修改全局模板两种解决方案,并分析了标准C函数与编译器特定函数的区别。通过智能提示、代码补全等VS2022特有功能,开发者可以更高效地学习C语言基础语法和项目结构管理。这些技能不仅适用于学习阶段,也为后续开发控制台应用、嵌入式系统等实际项目打下坚实基础。
嵌入式开发中数据结构优化与内存管理实战
数据结构是计算机科学的核心基础,其设计直接影响程序性能和资源利用率。在嵌入式开发领域,受限于MCU的有限内存(通常几十KB RAM)和实时性要求,数据结构选型需要特别考虑内存对齐、缓存优化和中断安全等关键因素。通过静态内存池、环形队列等工程实践方案,开发者可以在保证系统稳定性的同时提升实时性能。在STM32等ARM Cortex-M架构中,合理运用__attribute__((packed))等编译器特性可节省30%内存,而DMA优化能使LCD刷新性能提升5倍。这些技术在车载ECU、智能家居等物联网场景中尤为重要,能有效解决栈溢出、内存碎片等典型嵌入式问题。
永磁同步电机矢量控制Simulink仿真实战指南
永磁同步电机(PMSM)矢量控制是工业驱动领域的核心技术,通过坐标变换和双闭环控制实现高性能调速。其核心在于d-q轴解耦控制,利用Park/Clark变换将三相交流量转换为直流量进行调节。现代工程实践中,采用Simulink仿真可大幅降低开发风险,提前验证SVPWM算法和PI参数合理性。该技术广泛应用于新能源汽车电驱、工业伺服系统等场景,特别是需要精确转矩控制的场合。本文基于工业机械臂项目实践,详细解析如何构建包含电机模型、坐标变换、电流环设计的完整仿真框架,并分享参数敏感度分析和从仿真到实物的过渡经验。