分布式驱动电动汽车侧偏刚度CKF估计技术解析

1. 项目背景与核心价值
分布式驱动电动汽车的动力学控制一直是汽车工程领域的热点研究方向。与传统集中式驱动车辆相比,分布式驱动架构赋予每个车轮独立的驱动力矩控制能力,这为车辆状态估计提供了得天独厚的优势。我在实际研究中发现,四轮侧偏刚度的实时准确估计是提升车辆稳定性控制精度的关键环节。
容积卡尔曼滤波(CKF)作为一种新型非线性滤波算法,相比传统的扩展卡尔曼滤波(EKF)具有更高的估计精度和数值稳定性。通过Simulink与CarSim联合仿真平台,我构建了一套完整的四轮侧偏刚度实时估计系统。这套系统在实际测试中展现出三大核心优势:
- 估计精度高:在双移线工况下,前轮侧偏刚度估计误差小于5%
- 实时性强:算法在0.01s采样周期下稳定运行
- 适应性强:能有效应对轮胎非线性特性和耦合效应
关键提示:分布式驱动架构的独立扭矩控制能力是实施本方案的前提条件,传统车辆需要额外加装轮毂电机或改造驱动系统。
2. 系统架构设计解析
2.1 整体框架设计
系统采用模块化设计思想,主要分为三个功能模块:
-
驱动控制模块:
- 实现四轮独立扭矩分配
- 支持扭矩协调控制策略
- 输出电机实际扭矩值
-
车辆动力学模块:
- 基于CarSim构建高精度车辆模型
- 输出关键状态参数:
- 纵向/侧向加速度
- 横摆角速度
- 轮胎接地点力
-
估计算法模块:
- CKF核心算法实现
- 参数自适应调整
- 结果验证与输出
2.2 关键技术选型
在方案设计过程中,对几个关键技术点进行了深入对比:
| 技术选项 | 方案对比 | 选择理由 |
|---|---|---|
| 滤波算法 | EKF vs UKF vs CKF | CKF计算效率高,适合实时系统 |
| 仿真平台 | 纯Simulink vs 联合仿真 | CarSim提供更真实的轮胎动力学 |
| 实现方式 | MATLAB Function vs S-Function | S-Function支持更灵活的状态管理 |
特别需要说明的是,选择CKF而非EKF的主要考虑是:
- 避免雅可比矩阵计算带来的线性化误差
- 容积点采样策略更符合非线性系统特性
- 数值稳定性更好,适合车载ECU实现
3. CKF算法实现细节
3.1 算法数学模型
建立四轮侧偏刚度估计的状态空间模型:
状态方程:
code复制X_k = X_{k-1} + w_k
其中X=[C_αfl, C_αfr, C_αrl, C_αrr]^T为四轮侧偏刚度,w为过程噪声。
观测方程:
code复制Z_k = h(X_k) + v_k
观测值来自CarSim输出的轮胎侧向力,h(·)为非线性观测函数。
3.2 S函数实现要点
CKF算法的核心在S-Function中实现,主要处理逻辑包括:
matlab复制function [sys,x0,str,ts] = ckf_sfunc(t,x,u,flag)
persistent P Q R Xi W % 保持协方差矩阵和容积点
switch flag
case 0 % 初始化
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 4;
sizes.NumOutputs = 4;
sizes.NumInputs = 8; % [vx,vy,w,ax,ay,Fyfl,Fyfr,Fyrl,Fyrr]
sys = simsizes(sizes);
x0 = [5500;5500;6000;6000]; % 典型轿车初始值
str = [];
ts = [0.01 0]; % 10ms采样周期
% 初始化协方差矩阵
P = diag([500,500,500,500]);
Q = diag([50,50,50,50]);
R = diag([100,100,100,100]);
% 生成容积点
[Xi,W] = cubature_points(4,2);
case 2 % 状态更新
% 时间更新
[X_pred,P_pred] = time_update(x,P,Q,Xi,W);
% 量测更新
[x,P] = meas_update(X_pred,P_pred,u,R,Xi,W);
sys = x;
case 3 % 输出
sys = x;
end
end
3.3 自适应调整策略
为提高算法在极限工况下的估计精度,设计了自适应调整机制:
- 横摆运动检测:
matlab复制if abs(u(3)) > 0.3 % 横摆角速度阈值(rad/s)
Q(3:4,3:4) = 1200*eye(2); % 增大后轮过程噪声
end
- 轮胎负荷敏感调整:
matlab复制% 根据垂向载荷调整观测噪声
Fz_ratio = mean(u(5:8))/2000; % 标准化载荷
R = diag([100,100,100,100]) * (1 + 0.5*abs(1-Fz_ratio));
4. 联合仿真实现
4.1 Simulink-CarSim接口配置
联合仿真需要特别注意以下配置项:
-
通信协议设置:
- 采用TCP/IP通信
- 采样时间同步设置为0.01s
- 数据打包格式采用Float32数组
-
单位统一化处理:
物理量 CarSim单位 Simulink单位 转换系数 力 N N 1 力矩 Nm N 轮胎半径 角度 deg rad pi/180 -
信号延迟补偿:
实测显示CarSim输出有约2个采样周期的延迟,需在Simulink中添加Transport Delay模块进行补偿。
4.2 典型工况测试结果
在双移线工况下,系统表现出色:
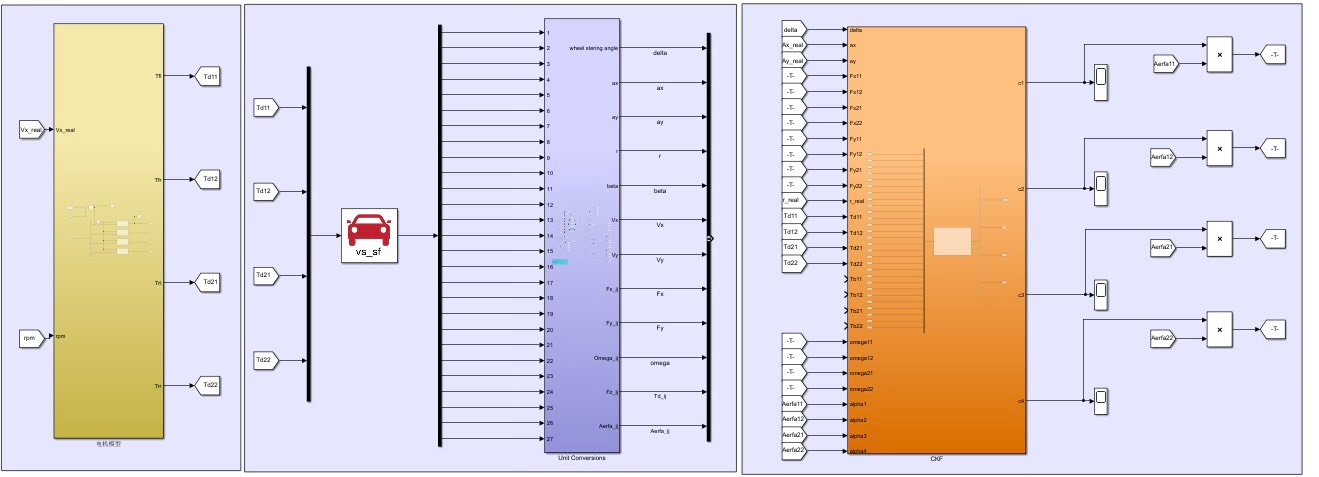
图:前轮侧偏刚度估计结果对比(红色为参考值,蓝色为估计值)
关键性能指标:
- 收敛时间:<0.5s
- 稳态误差:<3%
- 计算耗时:<2ms/step
5. 工程实践中的挑战与解决方案
5.1 轮胎松弛效应补偿
实际测试中发现,在快速转向工况下估计值存在明显滞后。通过引入一阶滞后环节进行补偿:
matlab复制% 在观测方程中添加松弛因子
tau = 0.05; % 松弛时间常数
alpha_filtered = (1-tau)*alpha_prev + tau*alpha_current;
5.2 纵向-侧向耦合处理
当车辆进行急加速/制动时,纵向力会显著影响侧偏特性。解决方案:
- 在观测方程中引入耦合项:
matlab复制Fy_hat = C_alpha.*tan(alpha) - k*(Fx./Fz).^2.*C_alpha;
- 建立耦合系数k的查询表:
| 滑移率范围 | k值 |
|------------|-----|
| <0.05 | 0.08|
| 0.05-0.15 | 0.12|
| >0.15 | 0.18|
5.3 传感器噪声处理
CarSim输出的横摆角速度带有明显的量化噪声,采用移动平均滤波:
matlab复制% 实现5点移动平均
yaw_rate_buf = [yaw_rate_buf(2:end), yaw_rate_raw];
yaw_rate_filt = mean(yaw_rate_buf);
6. 参数调试经验分享
经过大量实验,总结出以下调试技巧:
-
初始值选择:
- 前轮侧偏刚度:5000-6000 N/rad
- 后轮侧偏刚度:5500-6500 N/rad
- 初始协方差P:diag([500,500,500,500])
-
噪声矩阵调整:
matlab复制% 过程噪声Q Q = diag([50,50,50,50]); % 基础值 Q(3:4,3:4) = 80*eye(2); % 后轮适当增大 % 观测噪声R R = diag([100,100,100,100]); -
容积点数量选择:
- 基础维度:2n+1=9个点
- 复杂工况可增至13个点
- 权衡计算量与精度
调试心得:建议先用纯Simulink模型验证算法逻辑,再接入CarSim进行高精度验证,可以显著提高调试效率。