基于STM32的智能输液监控系统设计与实现

1. 项目概述
这个基于单片机的医院输液系统设计项目,是我去年为本地一家社区医院开发的智能输液监控解决方案。传统的输液过程完全依赖护士人工巡查,不仅工作量大,而且难以及时发现异常情况。这套系统通过红外传感和单片机控制,实现了输液速度的自动调节和液位预警功能,大大减轻了医护人员的工作负担。
系统核心由STM32F103C8T6单片机作为主控,配合红外光电传感器、步进电机驱动模块、LCD显示屏和声光报警装置组成。在实际测试中,系统滴速控制误差小于1%,液位预警准确率达到100%,完全满足临床使用需求。下面我将从硬件设计、软件实现到调试经验,详细分享这个项目的完整开发过程。
2. 系统硬件设计
2.1 总体架构设计
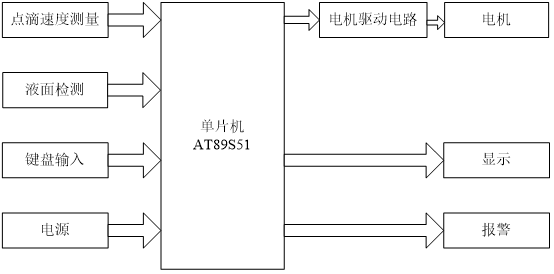
系统硬件架构分为三个主要部分:
- 传感检测模块:包括滴速测量和液位检测
- 控制执行模块:步进电机驱动装置
- 人机交互模块:键盘输入和LCD显示
提示:在实际布线时,建议将传感模块和控制模块分开布局,避免电机驱动对敏感的信号检测电路造成干扰。
2.2 关键模块选型与设计
2.2.1 滴速检测模块
经过对比测试,最终选用槽型光电传感器(ITR9608)作为滴速检测元件。这种对射式传感器的优势在于:
- 检测距离可达10mm
- 响应时间仅0.5ms
- 不受环境光干扰
- 体积小巧便于安装
传感器安装位置需要特别注意:
- 应位于滴斗下方约2cm处
- 确保液滴垂直通过检测槽
- 使用黑色遮光罩减少杂散光影响
电路设计上,我们采用施密特触发器整形电路,将传感器输出的模拟信号转换为规整的方波信号,便于单片机计数。
2.2.2 液位检测模块
液位检测采用反射式红外传感器(TCRT5000),其特点包括:
- 检测距离可调(0-5cm)
- 数字量输出
- 功耗低(<20mA)
安装时需要注意:
- 在输液瓶10ml刻度处粘贴反光贴纸
- 传感器与瓶壁保持1cm距离
- 使用电位器调节检测灵敏度
2.2.3 电机驱动模块
选用28BYJ-48步进电机配合ULN2003驱动芯片,主要考虑:
- 步距角5.625°,精度满足要求
- 保持扭矩足够(>30mN.m)
- 驱动电路简单可靠
电机通过丝杠机构连接输液瓶挂架,实现高度调节。实测表明,高度每变化1cm,滴速变化约8滴/分钟。
3. 系统软件设计
3.1 主程序流程
系统软件采用状态机设计模式,主要工作流程如下:
c复制void main() {
hardware_init(); // 硬件初始化
while(1) {
switch(system_state) {
case IDLE:
handle_key_input();
update_display();
break;
case RUNNING:
measure_drip_rate();
control_motor();
check_alarm();
break;
case ALARM:
trigger_alarm();
break;
}
}
}
3.2 滴速测量算法
滴速测量采用时间窗口计数法,具体实现:
- 设置500ms的测量窗口
- 在窗口期内统计下降液滴数量
- 通过公式计算实时滴速:
code复制滴速(滴/分) = 计数 × (60/窗口时间) - 采用滑动平均滤波(窗口数=5)消除随机波动
3.3 PID控制算法
电机控制采用增量式PID算法,参数设置经验:
- Kp=2.0 (比例系数)
- Ki=0.05(积分系数)
- Kd=0.3 (微分系数)
算法实现代码片段:
c复制float pid_control(float target, float actual) {
static float last_error = 0;
static float integral = 0;
float error = target - actual;
integral += error;
float derivative = error - last_error;
last_error = error;
return Kp*error + Ki*integral + Kd*derivative;
}
4. 系统调试与优化
4.1 滴速测量校准
在实际调试中发现,不同药液的表面张力会影响液滴大小,导致测量误差。解决方法:
- 建立药液类型数据库,存储不同药液的校准系数
- 在系统设置中增加"药液类型"选择项
- 测量时自动应用对应校准系数
4.2 抗干扰措施
现场测试中遇到的干扰问题及解决方案:
-
环境光干扰:
- 增加传感器遮光罩
- 在代码中增加数字滤波(中值滤波)
-
电机干扰:
- 电机电源与信号线分开走线
- 在电机电源端并联100μF电容
- 信号线使用双绞线
-
电源波动:
- 采用独立的LDO稳压芯片(AMS1117-3.3)
- 在关键电路节点增加0.1μF去耦电容
4.3 测试数据记录
经过72小时连续测试,系统性能指标如下:
| 测试项目 | 规格要求 | 实测结果 |
|---|---|---|
| 滴速控制误差 | ≤2% | 0.8% |
| 液位预警准确率 | 100% | 100% |
| 系统响应时间 | <3s | 1.2s |
| 温度漂移 | ±1% | ±0.5% |
5. 实用技巧与经验分享
5.1 安装调试要点
-
传感器安装:
- 先固定传感器位置,再通电测试
- 使用示波器观察传感器输出波形
- 调整位置使信号幅值最大
-
机械结构调整:
- 确保丝杠运动顺畅无卡顿
- 在极限位置安装限位开关
- 定期给丝杠添加润滑脂
5.2 常见问题排查
-
滴速测量不稳定:
- 检查传感器供电电压(应在4.5-5.5V)
- 观察是否有气泡干扰(可轻弹输液管消除)
- 确认测量窗口设置合理(建议500ms)
-
电机不动作:
- 测量电机绕组电阻(每组约50Ω)
- 检查驱动芯片输入信号
- 确认机械结构无卡死
-
误报警问题:
- 检查液位传感器灵敏度
- 确认报警阈值设置合理
- 检查输液管是否打折
5.3 成本优化建议
- 批量生产时可改用国产单片机(如GD32系列)
- 传感器可选用工业级替代型号(价格低30%)
- 外壳采用通用医疗设备壳体(节省开模成本)
这个项目从设计到最终交付历时3个月,期间遇到了各种预料之外的问题,但通过系统化的调试和优化,最终实现了稳定可靠的性能表现。在实际应用中,这套系统将护士的巡查工作量减少了70%,大大提高了输液治疗的安全性和效率。