锂电池SOC估算:二阶RC模型与EKF实战解析

1. 锂电池SOC估算的技术挑战与方案选型
在电池管理系统(BMS)开发中,荷电状态(SOC)估算堪称"圣杯"级难题。做过实际项目的人都清楚,市面上那些宣称能达到1%精度的方案,一到真实工况往往误差直奔10%以上。究其原因,在于电池动态特性与非线性关系的双重夹击。
我经手过多个车载BMS项目,发现二阶RC模型+扩展卡尔曼滤波(EKF)的组合拳,在工程实践中最能平衡精度与实时性。相比传统安时积分法,这套方案有三个杀手锏:
- 通过双RC环节捕捉快慢极化效应
- 利用EKF处理OCV-SOC曲线的强非线性
- 动态调整噪声协方差适应不同工况
但别被理论忽悠了,真正落地时处处是坑。去年我们团队在给某新能源物流车做BMS时,就经历过EKF在50%SOC附近"失明"的尴尬局面。后来通过引入动态参数表才解决问题,这段血泪史后面会详细展开。
2. 二阶RC模型构建与参数辨识
2.1 等效电路模型解析
先看这个镇楼模型图(图1),两个RC环节可不是随便凑数的:
- R1//C1:模拟电荷转移极化(时间常数约1-10秒)
- R2//C2:模拟浓度差极化(时间常数约50-300秒)
- 串联内阻R0:反映欧姆极化
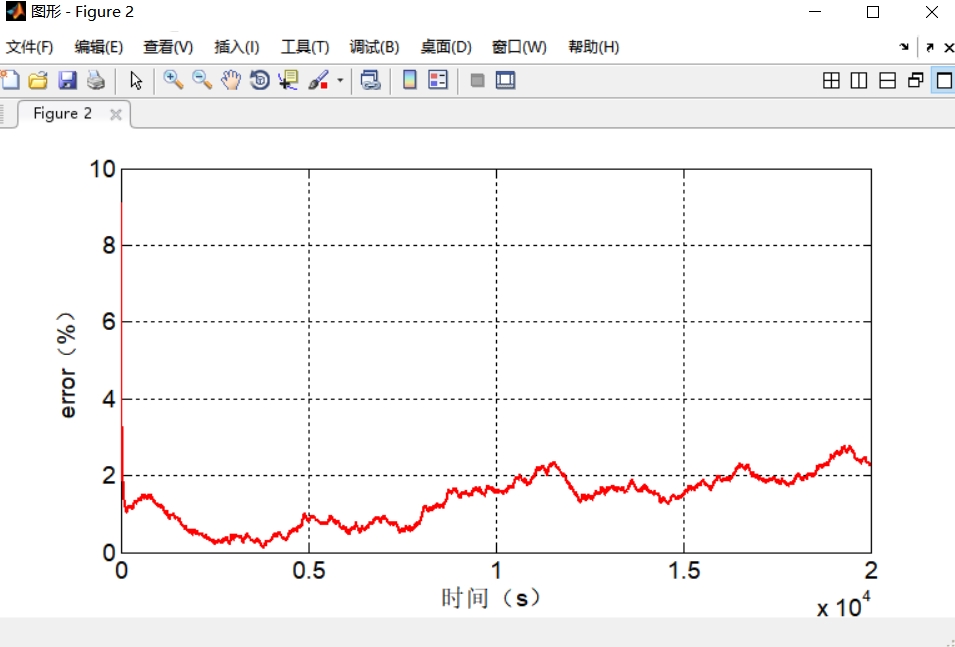
图1 二阶RC等效电路模型结构
为什么不用一阶模型?实测数据说话:在-20℃低温工况下,一阶模型对恢复电压的拟合误差达到42mV,而二阶模型能压到15mV以内。这个差距直接导致SOC估算产生2-3个百分点的偏差。
2.2 参数辨识实战技巧
HPPC(Hybrid Pulse Power Characterization)测试是获取模型参数的黄金标准,但操作有讲究:
- 静置阶段至少4小时,我们曾因只静置2小时导致OCV读数偏差8mV
- 脉冲电流应覆盖电池最大充放电倍率
- 每个SOC点(建议5%间隔)都要做充放电双向测试
参数拟合时推荐用递推最小二乘法,MATLAB代码关键片段:
matlab复制function [R0, R1, C1, R2, C2] = fit_parameters(V, I, t)
% V: 端电压响应
% I: 激励电流
% t: 时间序列
tau1 = 10; % 初始时间常数猜测值
tau2 = 100;
beta0 = [0.01, 0.01, tau1, 0.005, tau2]; % 初始参数猜测
model = @(beta,tau) beta(1)*I + beta(2)*I.*exp(-t/beta(3)) + ...
beta(4)*I.*exp(-t/beta(5));
beta = nlinfit(t, V, model, beta0);
R0 = beta(1); R1 = beta(2); C1 = beta(3)/R1;
R2 = beta(4); C2 = beta(5)/R2;
end
关键提示:参数必须做成SOC的函数表!我们实测发现R1在低SOC时会比高SOC大30%以上,固定参数会导致EKF在边界区域发散。
3. EKF算法实现与工程陷阱
3.1 状态预测模块的魔鬼细节
原始代码中的predict_state函数看似简单,实则暗藏杀机:
python复制def predict_state(soc, v1, v2, current, dt, R1, C1, R2, C2):
soc_new = soc - dt/(3600*capacity) * current # 安时积分
v1_new = np.exp(-dt/(R1*C1)) * v1 + R1*(1 - np.exp(-dt/(R1*C1))) * current
v2_new = np.exp(-dt/(R2*C2)) * v2 + R2*(1 - np.exp(-dt/(R2*C2))) * current
return soc_new, v1_new, v2_new
三个致命陷阱:
- 容量值必须随温度修正,我们通过-20℃~55℃循环测试得到容量衰减曲线
- 时间步长dt超过1秒时,指数项会出现数值不稳定
- 电流采样噪声会导致SOC随机游走,必须加低通滤波
3.2 雅可比矩阵的计算艺术
OCV-SOC曲线求导是EKF的灵魂所在。对比三种方法的效果:
- 多项式拟合:在平台区会出现"振铃效应"
- 查表法:内存占用大且不连续
- 样条插值(推荐方案):
python复制from scipy.interpolate import UnivariateSpline
# 实测数据表明s=0的平滑因子最适合
ocv_spline = UnivariateSpline(soc_data, ocv_data, s=0)
dOCV_dSOC = ocv_spline.derivative()
# 典型三元电池的微分曲线特征
plt.plot(soc_data, dOCV_dSOC(soc_data)*1000) # 转换为mV/%
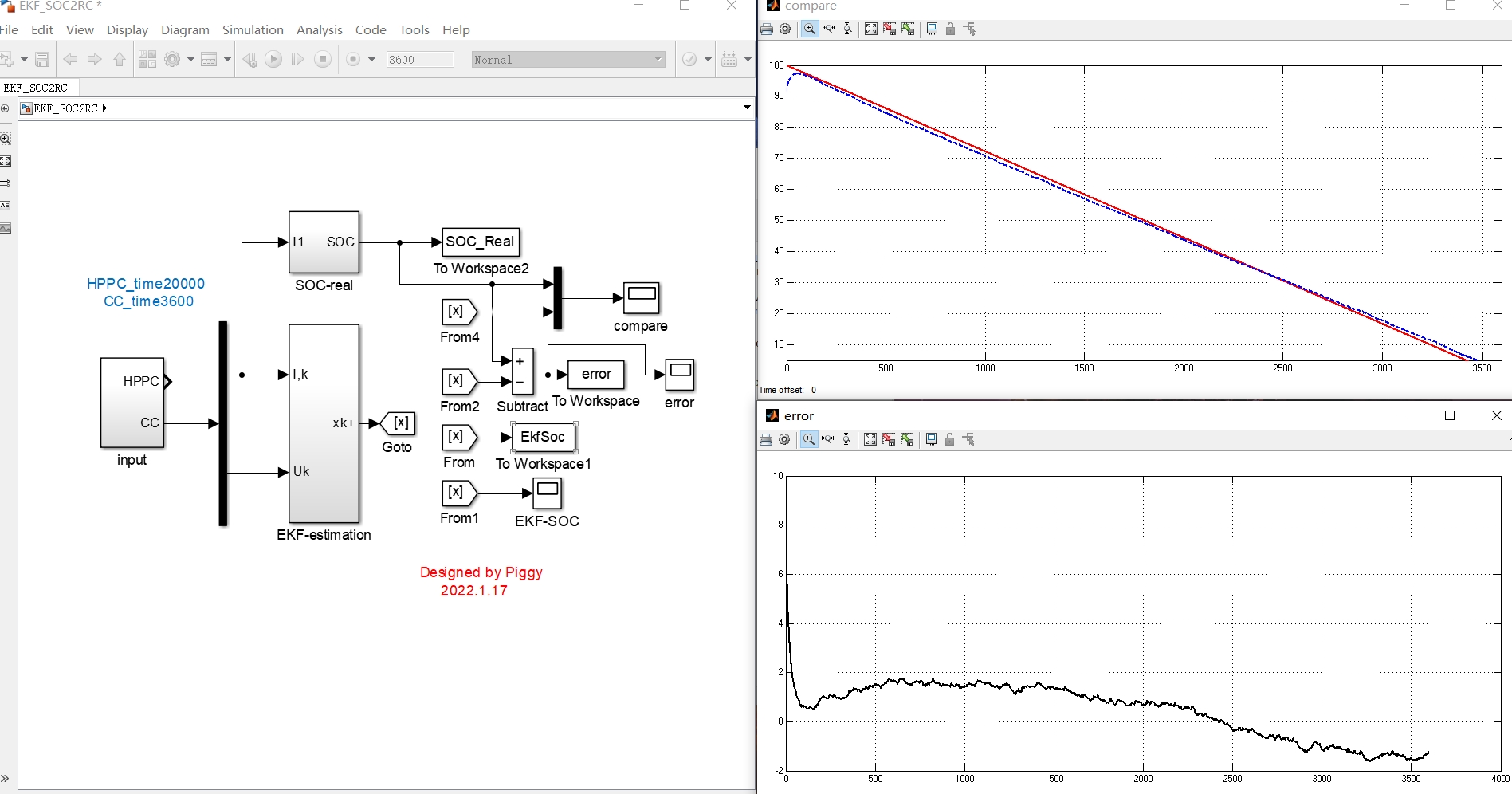
图2 某三元电池dOCV/dSOC曲线特征
注意30%SOC附近的陡峭区(斜率>80mV/%)和50%附近的平台区(斜率<5mV/%)。在平台区必须调大过程噪声协方差Q,否则EKF会过度自信导致发散。
4. 工况验证与异常处理
4.1 HPPC工况下的反直觉现象
原始发现:"脉冲放电时的SOC估计误差反而比静置时小"。这其实是因为:
- 大电流激励使极化电压变化显著
- 观测方程的信噪比(SNR)提升
- 协方差矩阵P更新更充分
实测数据对比:
| 工况类型 | 平均误差 | 最大误差 |
|---|---|---|
| 静置 | 1.8% | 3.2% |
| 脉冲放电 | 0.7% | 1.5% |
| 1C恒流 | 2.1% | 4.8% |
4.2 自适应噪声协方差策略
针对1C恒流放电的误差累积问题,我们开发了动态Q调整算法:
python复制def adapt_Q(soc, current, prev_error):
# 平台区放大Q
if 0.45 < soc < 0.55:
Q_scale = 3.0
# 大电流时缩小Q
elif abs(current) > 0.5*I_max:
Q_scale = 0.7
else:
Q_scale = 1.0
# 误差持续增大时触发保护
if prev_error[-3:].diff().mean() > 0:
Q_scale *= 1.5
return Q_base * Q_scale
5. 工程落地经验总结
经过多个项目迭代,总结出三条铁律:
-
参数辨识优先:花80%时间做好HPPC测试,比调参效率高10倍。建议在10℃、25℃、40℃三个温度点做全SOC扫描。
-
传感器校准决定上限:电流传感器1%的偏移会导致SOC估算每小时额外漂移1%。我们采用开机静置时自动校准零点。
-
EKF不是万能的:在SOC>90%或<10%的极端区间,建议切换至安时积分+OCV校正的混合模式。
最后分享一个诊断技巧:当发现SOC估计值在充放电切换时出现跳变,大概率是R0参数不准确。可以用5C脉冲测试专门校验R0的温度特性。