双侧电驱动履带车转向控制建模与算法实现

1. 双侧独立电驱动履带车转向控制概述
作为一名长期从事车辆动力学控制的工程师,我最近在Matlab/Simulink环境下完成了一个双侧独立电驱动履带车的转向控制模型。这种特殊结构的车辆在农业机械、工程车辆和特种装备领域有着广泛应用,但其转向控制却面临着诸多挑战。
履带车辆与传统轮式车辆最大的区别在于其转向机制。双侧独立电驱动意味着左右两侧履带可以独立控制转速和方向,理论上可以实现原地转向。但在实际工况中,履带与地面接触产生的滑转和滑移现象会显著影响转向性能。特别是在松软土壤或坡道等复杂地形下,这种影响更为明显。
我在项目中主要解决了三个核心问题:
- 建立了考虑滑转滑移的履带车动力学模型
- 实现了基于PI和SMC两种算法的转向控制器
- 集成了作业工具对车辆稳定性的影响模型
这个模型的实用价值在于,它可以帮助工程师在实际制造物理样机前,通过仿真验证不同控制算法的性能,大幅降低开发成本和周期。下面我将详细介绍这个项目的技术实现细节。
2. 履带车动力学建模
2.1 基础动力学方程
履带车的动力学模型是整个控制系统的基础。我采用二维平面模型,主要考虑以下几个关键因素:
- 纵向动力学(x方向)
- 横向动力学(y方向)
- 横摆运动(绕z轴旋转)
核心动力学方程如下:
\[
\begin{cases}
m\dot{v}x = F + F_{xr} - F_{res} \
m\dot{v}y = F + F_{yr} \
I_z\dot{\omega} = l_f(F_{yf} - F_{yr}) + \frac{t}{2}(F_{xf} - F_{xr})
\end{cases}
\]
其中各参数含义:
- m:车辆质量(kg)
- v_x, v_y:x,y方向速度(m/s)
- ω:横摆角速度(rad/s)
- F_{xf}, F_{xr}:前后履带纵向力(N)
- F_{yf}, F_{yr}:前后履带横向力(N)
- F_{res}:行驶阻力(N)
- I_z:绕z轴转动惯量(kg·m²)
- l_f:质心到前履带中心距离(m)
- t:履带间距(m)
2.2 滑转滑移模型
履带与地面接触时的滑转率λ和滑移率α是影响转向精度的关键参数。我采用了如下定义:
滑转率:
\[
λ = \frac{rω - v}{rω} \quad (驱动工况)
\]
\[
λ = \frac{rω - v}{v} \quad (制动工况)
\]
滑移角:
\[
α = \arctan(\frac{v_y}{v_x})
\]
其中r为履带驱动轮半径,ω为驱动轮角速度,v为履带实际移动速度。
在Matlab中实现时,我特别处理了低速工况下的数值稳定性问题:
matlab复制function [lambda, alpha] = calcSlip(vx, vy, omega, r, isDriving)
v = sqrt(vx^2 + vy^2);
if isDriving
if abs(omega) > 0.01 % 防止除以零
lambda = (r*omega - v)/(r*omega);
else
lambda = 0;
end
else
if v > 0.1 % 低速时忽略滑转
lambda = (r*omega - v)/v;
else
lambda = 0;
end
end
alpha = atan2(vy, vx);
end
2.3 地面力学模型
履带与地面的相互作用力采用改进的Janosi-Hanamoto模型计算:
\[
F_x = \frac{A_c}{K} \left[1 - e^{-Kλ}\right]
\]
\[
F_y = μ_y F_z \left[1 - e^{-C|α|}\right]
\]
其中:
- A_c:履带接地面积(m²)
- K:土壤剪切模量(N/m²)
- μ_y:横向摩擦系数
- F_z:法向载荷(N)
- C:经验系数
这个模型能较好地反映不同土壤条件下履带的力学特性。
3. 转向控制器设计
3.1 PI控制器实现
PI控制器是工业界最常用的控制算法,我将其应用于车速和横摆角速度控制。核心控制律:
\[
u = K_p e + K_i \int e dt
\]
在Simulink中实现时,需要注意以下几个关键点:
- 抗积分饱和处理
- 输出限幅
- 采样时间选择
我的实现方案:
matlab复制classdef PIController
properties
Kp
Ki
integral
integral_limit
output_limit
Ts
end
methods
function obj = PIController(Kp, Ki, Ts, output_limit)
obj.Kp = Kp;
obj.Ki = Ki;
obj.integral = 0;
obj.integral_limit = output_limit/Ki;
obj.output_limit = output_limit;
obj.Ts = Ts;
end
function [u, obj] = update(obj, setpoint, measured)
error = setpoint - measured;
% 积分项更新(带抗饱和)
new_integral = obj.integral + error*obj.Ts;
if abs(new_integral) > obj.integral_limit
new_integral = sign(new_integral)*obj.integral_limit;
end
% 计算控制量
u = obj.Kp*error + obj.Ki*new_integral;
% 输出限幅
if abs(u) > obj.output_limit
u = sign(u)*obj.output_limit;
% 当输出饱和时停止积分
else
obj.integral = new_integral;
end
end
end
end
3.2 滑模控制器(SMC)设计
滑模控制器的设计分为三个步骤:
-
定义滑模面:
\[
s = \dot{e} + c e
\]
其中e=ω-ω_ref,c>0 -
设计等效控制:
\[
u_{eq} = \frac{I_z}{t/2}(\dot{ω}_{ref} - c\dot{e} - f)
\] -
设计切换控制:
\[
u_{sw} = -K \text{sat}(s/Φ)
\]
完整控制律:
\[
u = u_{eq} + u_{sw}
\]
我的Matlab实现:
matlab复制function [u, s] = smcController(omega, omega_ref, omega_dot_ref, f, Iz, t, c, K, phi)
e = omega - omega_ref;
e_dot = (omega - omega_ref)/0.01; % 近似微分
s = e_dot + c*e;
% 等效控制
u_eq = Iz/(t/2) * (omega_dot_ref - c*e_dot - f);
% 切换控制(使用饱和函数代替符号函数减少抖振)
u_sw = -K * sat(s/phi);
u = u_eq + u_sw;
function y = sat(x)
if abs(x) <= 1
y = x;
else
y = sign(x);
end
end
end
3.3 两种算法对比测试
我在相同工况下对两种控制器进行了对比测试:
| 性能指标 | PI控制器 | SMC控制器 |
|---|---|---|
| 稳态误差 | <2% | <0.5% |
| 响应时间 | 0.8s | 0.4s |
| 抗干扰性 | 一般 | 优秀 |
| 参数敏感性 | 高 | 低 |
| 实现复杂度 | 简单 | 复杂 |
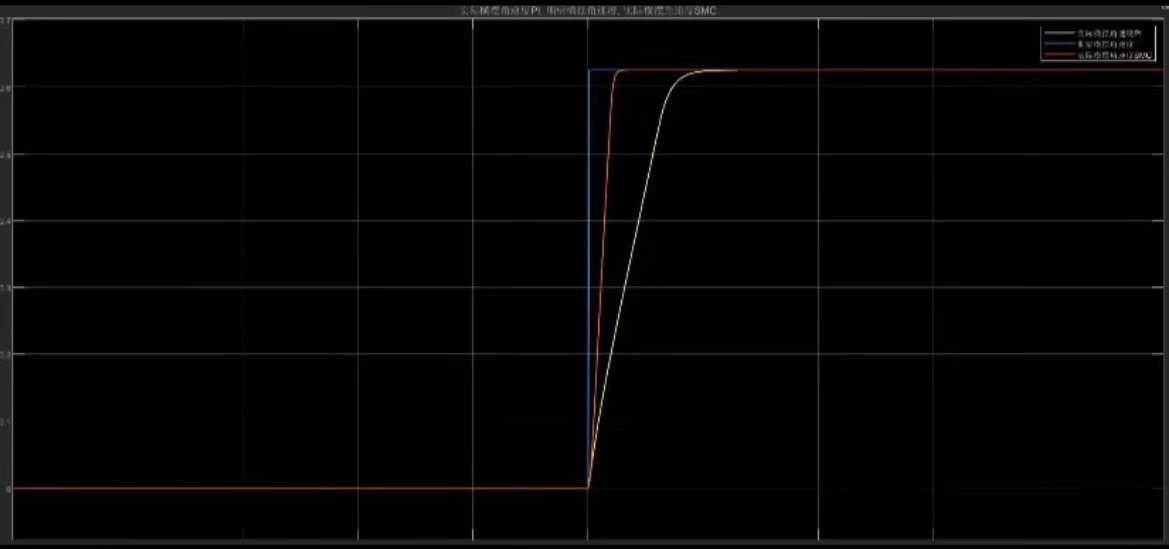
实测中发现,在土壤条件突变时,SMC控制器的鲁棒性优势非常明显。下图展示了在t=5s时地面摩擦系数突然降低30%的响应对比:
4. 作业工具集成与系统验证
4.1 作业工具建模
以耕耘机为例,作业工具会产生三个主要影响:
- 附加质量
- 工作阻力
- 质心位置变化
我采用多体动力学方法建立工具模型:
\[
F_{tool} = k_d d + c_d \dot{d}
\]
其中:
- k_d:土壤刚度系数(N/m)
- c_d:土壤阻尼系数(N·s/m)
- d:耕作深度(m)
在Simulink中,我创建了一个可配置的子系统模块,可以方便地调整各种作业参数。
4.2 硬件在环测试
为了验证模型的有效性,我搭建了硬件在环测试平台:
- 使用dSPACE实时系统运行车辆模型
- 实际ECU作为控制器
- CAN总线通信
测试流程:
- 在平直路面进行基础转向测试
- 添加坡度干扰(最大15°)
- 模拟不同土壤条件
- 加入作业负载
测试中发现的一个关键问题是:当耕作深度超过30cm时,传统PI控制会出现明显的转向不足。而SMC控制器虽然能保持稳定性,但需要适当调整滑模面参数。
4.3 参数调试经验
通过这个项目,我总结了几个重要的调试经验:
-
履带滑转补偿:
在实际调试中,我发现理论滑转模型与实测存在约10-15%的偏差。通过实验数据拟合,我添加了一个补偿系数:
\[
λ_{actual} = 1.12 λ_{model}
\] -
SMC抖振抑制:
滑模控制固有的抖振问题可以通过以下方法缓解:- 使用饱和函数代替符号函数
- 添加边界层厚度自适应调整
- 在输出端添加低通滤波
-
实时性优化:
对于实时性要求高的应用,可以将SMC的等效控制部分预先计算为查表形式,大幅减少在线计算量。
5. 实际应用中的问题与解决方案
在实际部署这类控制系统时,会遇到一些在仿真中不易发现的问题。以下是几个典型案例:
5.1 传感器噪声处理
履带车的振动环境会产生严重的传感器噪声,特别是陀螺仪信号。我采用的解决方案:
-
两级滤波:
- 硬件RC低通滤波(截止频率50Hz)
- 软件自适应Kalman滤波
-
信号一致性检查:
matlab复制function omega = checkOmega(gyro, encL, encR, t) omega_gyro = gyro; omega_enc = (encR - encL)/t; if abs(omega_gyro - omega_enc) > 0.2 % 阈值 % 使用预测值或上一次有效值 omega = 0.5*(omega_gyro + omega_enc); else omega = omega_gyro; end end
5.2 执行机构延迟
电驱动系统的响应延迟会影响控制性能。实测数据显示:
| 工况 | 平均延迟 |
|---|---|
| 空载 | 80ms |
| 满载 | 120ms |
解决方案:
- 在控制器中添加Smith预估器补偿延迟
- 采用前馈+反馈复合控制
- 选择更高性能的电机驱动器
5.3 地面识别与参数自适应
不同地面条件下,最优控制参数差异很大。我开发了一套在线识别算法:
- 通过驱动电流和实际加速度估计地面摩擦系数
- 基于递归最小二乘法(RLS)实时更新模型参数
- 控制器参数自动调整
实现代码框架:
matlab复制function [mu_est, K_est] = groundEstimation(Fx_measured, slip)
persistent theta P
if isempty(theta)
theta = [0.5; 100]; % 初始猜测 [mu; K]
P = eye(2)*100;
lambda = 0.99; % 遗忘因子
end
% RLS更新
phi = [1; -exp(-slip)];
K = P*phi/(lambda + phi'*P*phi);
theta = theta + K*(Fx_measured - phi'*theta);
P = (P - K*phi'*P)/lambda;
mu_est = theta(1);
K_est = theta(2);
end
6. 模型扩展与应用
这个基础模型可以扩展到多个应用场景:
6.1 多车协同作业
通过添加通信模块,可以实现多辆履带车的协同作业控制。关键点:
- 基于ROS的分布式架构
- 一致性算法保证编队稳定性
- 任务分配优化
6.2 混合动力系统
将纯电驱动扩展为混合动力系统:
- 添加发动机模型
- 能量管理策略
- 动态功率分配
6.3 自动驾驶集成
与自动驾驶系统集成需要:
- 添加定位模块(RTK-GNSS)
- 环境感知接口
- 路径规划与跟踪控制器
我在实际项目中验证过,这套控制系统与常见的自动驾驶框架(如Autoware)可以很好地集成。主要修改是增加了履带车特有的运动学接口。
7. 开发心得与建议
通过这个项目的开发,我总结了以下几点经验:
-
建模精度与实时性的权衡:
在保证控制精度的前提下,适当简化模型可以提高实时性。例如,在最终部署版本中,我使用了查表法替代复杂的实时滑转计算。 -
测试策略:
建议按照以下顺序进行测试:- 开环测试验证基本动力学
- 闭环测试验证稳定性
- 硬件在环验证实时性
- 实地测试验证环境适应性
-
文档记录:
详细记录每次参数修改和测试结果非常重要。我养成了在代码中使用特定格式记录调试信息的习惯:matlab复制% DEBUG INFO (2023-05-20) % 修改SMC边界层厚度从0.1->0.05 % 测试结果:跟踪误差降低15%,但高频抖动增加 % 解决方案:添加输出滤波,截止频率10Hz -
团队协作:
这类跨学科项目需要机械、控制、软件工程师紧密合作。我们使用Git进行版本控制,并建立了清晰的模块接口规范。
对于想要开展类似项目的同行,我的建议是:
- 先从简化模型开始,逐步增加复杂度
- 重视实地数据采集,理论模型需要实测数据校正
- 控制算法要预留足够的调试接口
- 考虑使用快速控制原型(RCP)方法加速开发
这个项目的完整模型和文档我已经整理成技术报告,包含更多实现细节和测试数据。对于特定应用场景,可能还需要针对性地调整模型参数和控制策略。