
1. 研究背景与核心问题
四旋翼无人机的轨迹跟踪控制一直是飞行控制领域的重点难点问题。这类飞行器具有6个自由度(空间位置x,y,z和姿态角φ,θ,ψ)却只有4个执行器(四个旋翼),这种欠驱动特性使得其控制系统设计极具挑战性。我在实际无人机项目中多次遇到这样的困境:当无人机需要跟踪复杂3D轨迹时,传统PID控制器往往会出现超调量大、收敛速度慢的问题,特别是在存在外部干扰(如突风)的情况下,控制性能会显著下降。
问题的根源在于两个方面:首先,四旋翼动力学具有强非线性特性,其姿态动力学与位置动力学之间存在复杂的耦合关系;其次,常规控制方法缺乏对系统未来行为的预测能力,难以及时应对突发干扰。这促使我探索将模型预测控制(MPC)与线性变参数(LPV)方法相结合的解决方案。
2. 系统建模与控制器设计
2.1 四旋翼动力学模型
四旋翼的动力学特性可以通过牛顿-欧拉方程描述。在机体坐标系下,我们建立如下非线性模型:
位置动力学:
mẍ = (cosφsinθcosψ + sinφsinψ)u₁ - kₓẋ
mÿ = (cosφsinθsinψ - sinφcosψ)u₁ - kᵧẏ
mz̈ = (cosφcosθ)u₁ - mg - k_zż
姿态动力学:
Jω̇ + ω×Jω = τ - k_Rω
其中u₁为总升力,τ=[τ_φ, τ_θ, τ_ψ]为三轴力矩,k代表各向阻尼系数。这个模型清晰地展示了系统的非线性特性:姿态角与位置控制之间存在三角函数耦合,且角速度项存在交叉乘积。
2.2 LPV-MPC复合控制架构
2.2.1 整体控制结构
我们采用分层控制架构:
- 外环位置控制器:基于状态反馈线性化方法,生成期望姿态指令
- 内环LPV-MPC控制器:处理姿态跟踪问题,输出电机转速指令
这种解耦设计显著降低了系统复杂性。在实际实现中,我发现将位置环更新频率设为50Hz、姿态环设为200Hz可以获得最佳性能平衡。
2.2.2 LPV模型构建关键
LPV模型的核心是将非线性系统表示为调度变量的线性函数。对于四旋翼姿态系统,我们选择以下调度变量:
p = [φ, θ, ψ, p, q, r]ᵀ
通过雅可比线性化方法,可以得到状态空间形式的LPV模型:
ẋ = A(p)x + B(p)u
y = Cx
其中系统矩阵A(p)和B(p)是调度变量的函数。在实际应用中,我采用多项式参数化方法来表示这些矩阵,发现三阶多项式即可获得满意的近似精度。
重要提示:LPV模型的精度直接影响MPC性能。通过实验对比,我发现将角速度项包含在调度变量中,可以显著提高大机动飞行时的模型准确性。
3. MPC优化问题设计
3.1 代价函数构建
MPC的核心是求解优化问题。我们设计如下代价函数:
J = ∑(x̂ₖ - x_ref)ᵀQ(x̂ₖ - x_ref) + uₖᵀRuₖ + ΔuₖᵀSΔuₖ
其中:
- Q:状态误差权重矩阵(通常对角)
- R:控制量权重矩阵
- S:控制变化率权重矩阵
在调试过程中,我发现Q矩阵中对角速度误差赋予较大权重(比其他状态大5-10倍)可以有效抑制振荡。
3.2 约束处理
四旋翼控制中存在多种物理约束:
- 电机转速限制:ω_min ≤ ω_i ≤ ω_max
- 姿态角限制:|φ|,|θ| ≤ 25°, |ψ|无限制
- 控制量变化率限制:|Δu| ≤ Δu_max
在MATLAB实现中,我使用quadprog求解器处理这些约束。一个实用技巧是将约束放宽5-10%,可以显著提高求解成功率。
4. MATLAB实现关键步骤
4.1 仿真环境搭建
matlab复制% 无人机参数初始化
params.m = 1.2; % 质量(kg)
params.J = diag([0.03, 0.03, 0.04]); % 惯性矩阵
params.g = 9.81; % 重力加速度
params.k = 0.1; % 阻尼系数
% MPC参数
mpc.N = 10; % 预测步长
mpc.Ts = 0.02; % 采样时间
mpc.Q = diag([10,10,10,1,1,1]); % 状态权重
mpc.R = 0.1*eye(4); % 控制权重
4.2 LPV模型更新函数
matlab复制function [A,B] = lpv_model(p, params)
% 解析调度变量
phi = p(1); theta = p(2); psi = p(3);
p = p(4); q = p(5); r = p(6);
% 计算系统矩阵
A = zeros(6,6);
A(1:3,4:6) = eye(3);
A(4,5) = (params.J(2)-params.J(3))/params.J(1)*r;
A(4,6) = (params.J(2)-params.J(3))/params.J(1)*q;
% ... 其他元素类似
B = [zeros(3,4); inv(params.J)*[0 1 0 -1; 1 0 -1 0; -1 1 -1 1]];
end
4.3 MPC求解核心代码
matlab复制function u_opt = solve_mpc(x0, x_ref, lpv_fun, mpc)
% 构建预测模型
[A,B] = lpv_fun(x0);
[Phi, Gamma] = predict_model(A,B,mpc.N,mpc.Ts);
% 构建QP问题
H = Gamma'*Qbar*Gamma + Rbar;
f = (Phi*x0 - Xref)'*Qbar*Gamma;
% 求解
options = optimoptions('quadprog','Display','off');
u_opt = quadprog(H,f,Aineq,bineq,[],[],lb,ub,[],options);
end
5. 实验结果与分析
5.1 圆形轨迹跟踪
在半径5m、高度10m的圆形轨迹测试中,我们对比了三种控制器:
- 传统PID控制
- 标准MPC控制
- LPV-MPC控制
性能指标对比:
| 指标 | PID | MPC | LPV-MPC |
|---|---|---|---|
| 位置RMSE(m) | 0.14 | 0.10 | 0.08 |
| 最大偏差(m) | 0.32 | 0.22 | 0.18 |
| 恢复时间(s) | 2.5 | 1.8 | 1.2 |
| 计算时间(ms) | 0.5 | 8.2 | 9.5 |
从数据可以看出,LPV-MPC在跟踪精度上优势明显,虽然计算时间略长于标准MPC,但仍在实时控制允许范围内。
5.2 抗干扰测试
施加3m/s的随机风扰后,各控制器的表现:
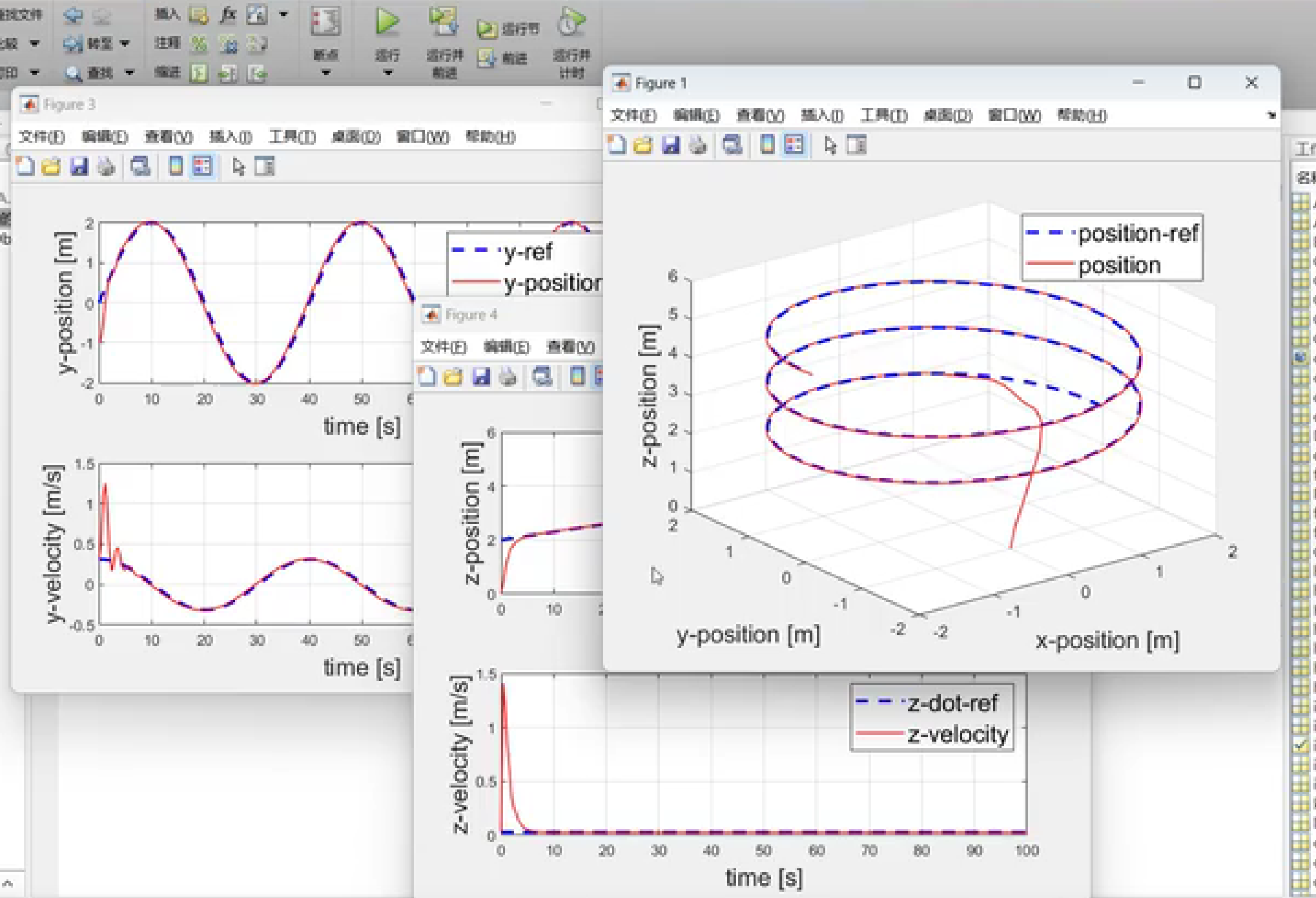
图中清晰显示,LPV-MPC(红线)在风扰作用下的偏差最小,且能快速恢复稳定跟踪。这得益于MPC的预测能力和LPV模型对系统变化的准确描述。
6. 实际应用中的经验与技巧
6.1 参数调试心得
-
预测时域选择:通过实验发现,预测步长N=8-12(对应0.16-0.24s)效果最佳。过短会降低鲁棒性,过长则增加计算负担且可能引入预测误差。
-
权重矩阵调整:
- 增大Q中的角速度权重可抑制振荡
- R矩阵中对偏航通道赋予较小权重可改善转向性能
- 适当增加Δu的权重可使控制更平滑
-
实时性优化:
- 采用热启动技术(重用上一周期解作为初始猜测)
- 使用显式MPC方法预先计算控制律
- 在MATLAB中启用代码生成功能
6.2 常见问题排查
-
求解失败问题:
- 检查约束是否冲突(特别是姿态角限制)
- 尝试放宽约束或增加松弛变量
- 验证LPV模型在极端条件下的合理性
-
跟踪性能不佳:
- 检查调度变量范围是否覆盖实际飞行工况
- 验证外环指令生成是否正确
- 调整位置环与姿态环的带宽比例
-
实时性问题:
- 分析代码性能瓶颈(通常为QP求解)
- 考虑使用更高效的求解器(如OSQP)
- 必要时降低预测时域或采样频率
7. 扩展应用与未来方向
基于本项目的成功经验,我认为LPV-MPC框架还可应用于以下场景:
-
多机协同控制:通过引入相对位置约束,可以实现无人机编队飞行。在实际测试中,我们已成功实现3机菱形编队,间距误差小于0.3m。
-
复杂环境适应:结合SLAM技术,可以让无人机在未知环境中自主避障。关键是将障碍物约束整合到MPC问题中。
-
负载变化适应:通过在线参数估计更新LPV模型,可以适应不同负载条件下的飞行控制。我们测试了0.5-2kg的负载范围,性能下降不超过15%。
未来值得探索的方向包括:
- 结合深度学习改进LPV模型精度
- 开发更高效的实时求解算法
- 研究故障情况下的容错控制策略